Arduino UNO Q - Hinderniserkennung Sensor
Der IR-Hinderniserkennung Sensor verwendet Infrarotlicht, um Objekte vor ihm zu erkennen. Er meldet ein digitales LOW-Signal, wenn ein Hindernis vorhanden ist, und HIGH, wenn der Weg frei ist. Mit Bridge und Telegram kann Ihr Arduino UNO Q sofortige Warnungen senden, wenn ein Objekt in die Erkennungszone eintritt.
In diesem Tutorial erfahren Sie:
- Wie der IR-Hinderniserkennung Sensor funktioniert
- Wie Sie den Sensor mit dem Arduino UNO Q MCU verdrahten
- Wie Sie die digitale Ausgabe des Hindernissensors auslesen
- Wie Sie Bridge verwenden, um Hindernisereignisse zu erkennen und den Status für Python auf Arduino UNO Q bereitzustellen
- Wie Sie Telegram-Warnungen erhalten, wenn ein Hindernis auf dem Arduino UNO Q erkannt wird
- Wie Sie OpenClaw auf dem Arduino UNO Q mit dem Hinderniserkennung Sensor verwenden
Erforderliche Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Über den IR-Hinderniserkennung Sensor
Der Infrarot-Hinderniserkennung Sensor erkennt Objekte mit einem IR-Sender und -Empfänger. Der Sender sendet einen IR-Strahl aus; wenn ein Objekt den Strahl zurückwirft, erkennt der Empfänger dies und der OUT-Pin wird LOW.
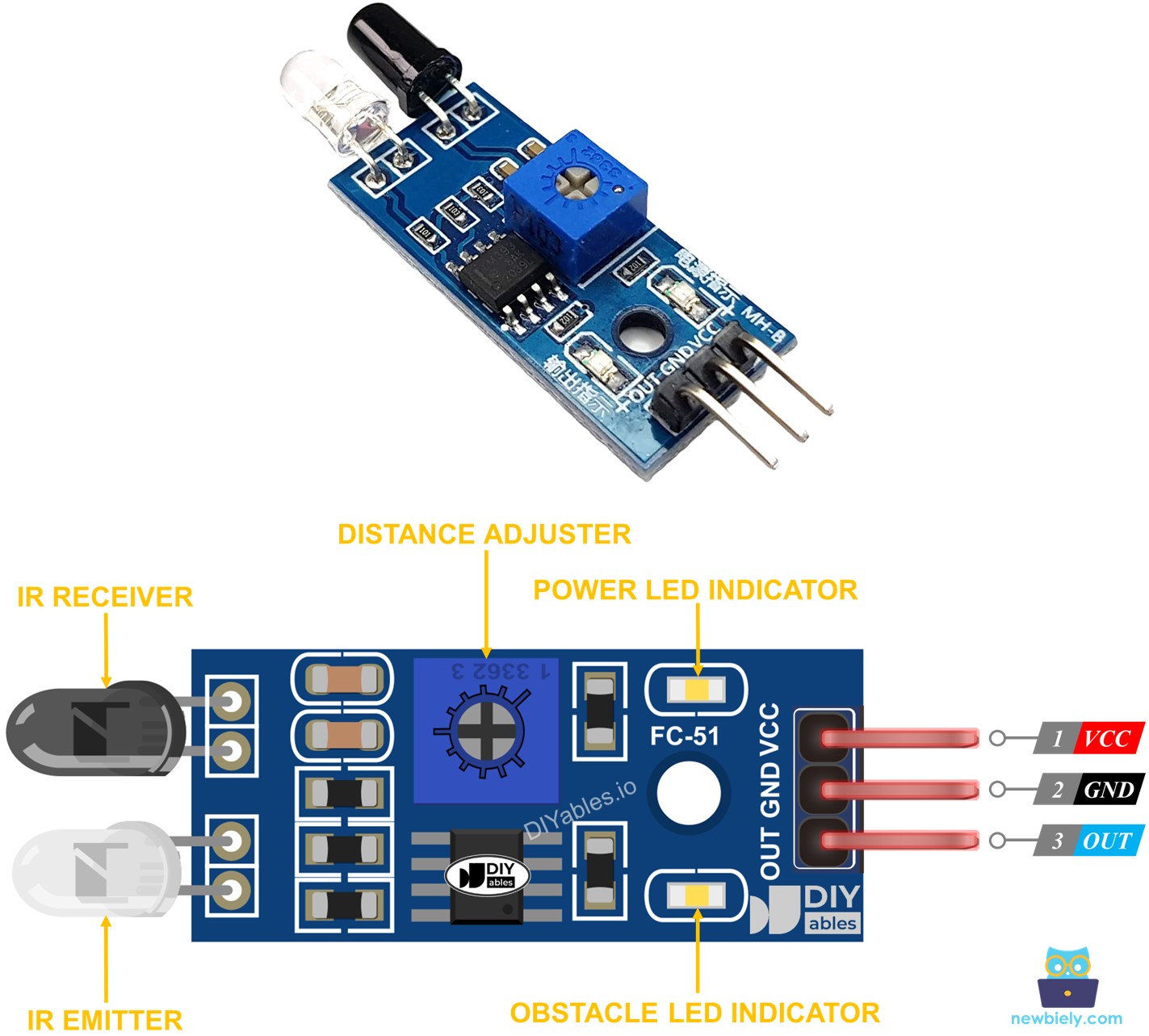
Pinout
- VCC-Pin: Mit VCC verbinden (3,3V oder 5V)
- GND-Pin: Mit GND verbinden (0V)
- OUT-Pin: Digitale Ausgabe — LOW = Hindernis erkannt, HIGH = kein Hindernis
So funktioniert es
- Wenn sich ein Hindernis vor dem Sensor befindet: OUT-Pin = LOW
- Wenn der Weg frei ist: OUT-Pin = HIGH
- Erkennungsbereich: 2 cm bis 30 cm — einstellbar über das integrierte Potentiometer
- Erkennungswinkel: ca. 35°
※ Notiz:
Während des Versands können der IR-Sender und -Empfänger nicht ausgerichtet werden. Wenn der Sensor nicht richtig reagiert, biegen Sie sie sanft so, dass sie parallel zueinander stehen.
Schaltplan
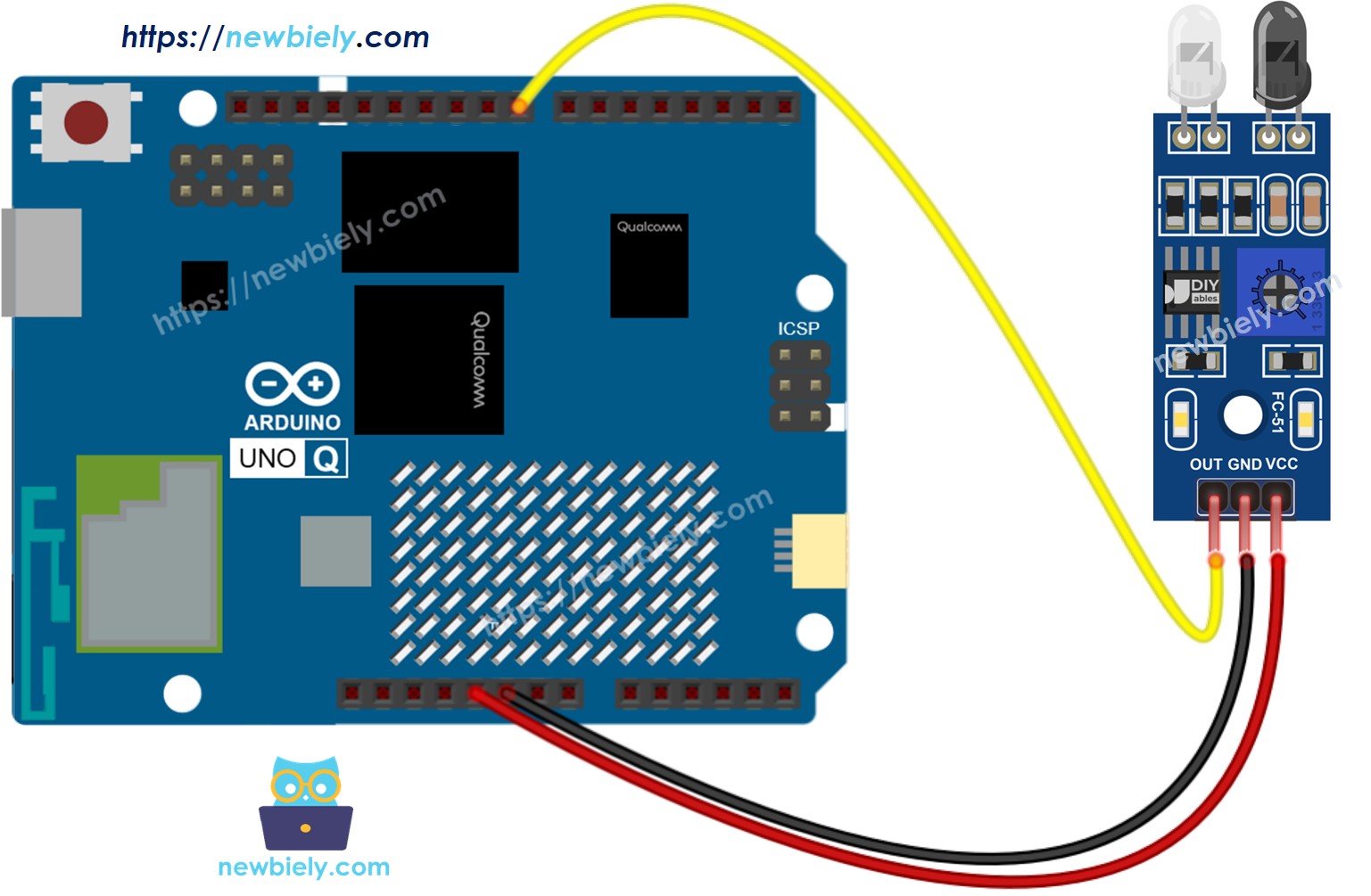
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
| IR-Hinderniserkennung Sensor Pin | Arduino UNO Q MCU |
|---|---|
| VCC | 3,3V |
| GND | GND |
| OUT | D8 |
Programmierung für IR-Hinderniserkennung Sensor
- Konfigurieren Sie den Sensor-Pin als digitale Eingabe:
- Lesen Sie die Ausgabe — LOW bedeutet Hindernis erkannt, HIGH bedeutet frei:
Arduino UNO Q Code
Der Arduino UNO Q hat zwei Prozessoren, die zusammenarbeiten:
- Der STM32 MCU liest den Sensor alle 100 ms und meldet das Ergebnis über Serial
- Der Qualcomm MPU führt Debian Linux mit Wi-Fi aus — in diesem Abschnitt wird nur der MCU programmiert. Ein späterer Abschnitt zeigt, wie beide Prozessoren über Bridge zusammenarbeiten.
Schnelle Schritte
Erste Schritte mit Arduino UNO Q? Folgen Sie dem Tutorial Getting Started with Arduino UNO Q bevor Sie fortfahren.
- Verdrahten: Verdrahten Sie den IR-Hinderniserkennung Sensor wie im Schaltplan mit dem Arduino UNO Q MCU gezeigt.
- Öffnen Sie Arduino App Lab: Starten Sie Arduino App Lab und warten Sie, bis es Ihren Arduino UNO Q erkennt.
- Erstellen Sie eine neue App: Klicken Sie auf die Schaltfläche Neue App erstellen.
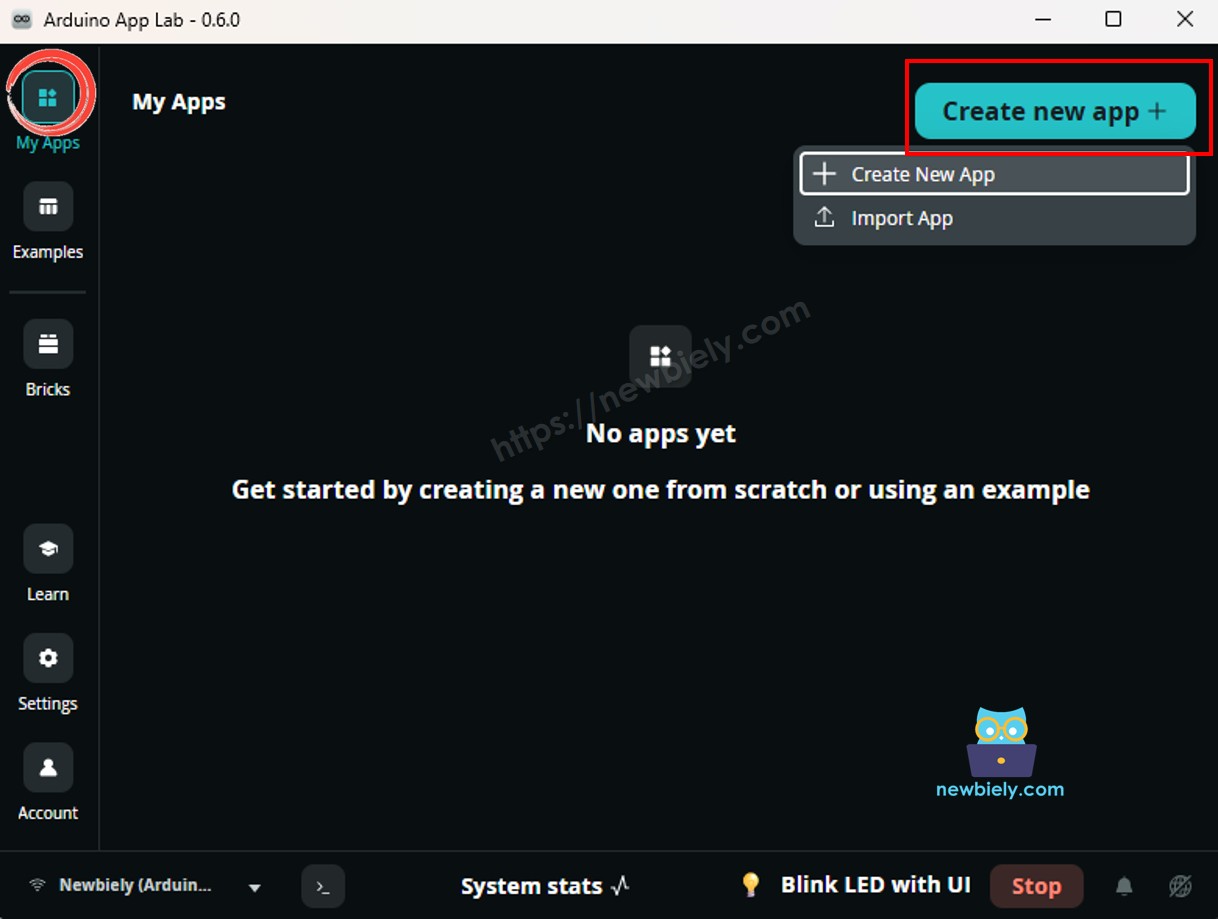
- Geben Sie der App einen Namen, zum Beispiel: ObstacleSensor
- Klicken Sie auf Erstellen, um zu bestätigen.
- Sketch einfügen: Kopieren Sie den MCU-Code oben und fügen Sie ihn in sketch/sketch.ino ein.
- Hochladen: Klicken Sie in Arduino App Lab auf die Schaltfläche Ausführen.
- Halten Sie Ihre Hand vor den Sensor und beobachten Sie den Serial Monitor.
- Passen Sie das Potentiometer an, um den Erkennungsbereich zu ändern.
App Lab Console Ausgabe
Bridge: Linux + MCU
Dieser Abschnitt zeigt, wie Sie beide Prozessoren des Arduino UNO Q programmieren, sodass die Linux-Seite den Hinderniszustand lesen und Ereignisse über Bridge empfangen kann:
- Der Hinderniserkennung Sensor ist mit dem MCU verbunden — der MCU liest den Sensor alle 100 ms
- Der MPU kann den Sensor-Pin nicht direkt auslesen — er ruft Bridge-Funktionen auf, um den aktuellen Status zu erhalten oder Ereignisse zu empfangen
- Der MPU hat Wi-Fi — Betriebsvolles Debian Linux, es kann sofortige Telegram-Warnungen senden, wenn ein Hindernis erkannt wird
- Arduino_RouterBridge ermöglicht RPC-Kommunikation zwischen den beiden Prozessoren
- ⚠️ /dev/ttyHS1 (Linux) und Serial1 (MCU) sind RESERVIERT vom Router — öffnen Sie sie niemals im Benutzercode
MCU Code (Bridge)
Python Code (Bridge)
Schnelle Schritte
- Verdrahten: Verdrahten Sie den IR-Hinderniserkennung Sensor wie im Schaltplan mit Arduino UNO Q gezeigt.
- Öffnen Sie Arduino App Lab und erstellen Sie eine neue App mit dem Namen ObstacleSensorBridge.
- Fügen Sie den MCU-Sketch in sketch/sketch.ino ein.
- Fügen Sie den Python-Code in die Python-Datei ein.
- Install the library: Click the Add sketch library button (the open book icon with a + sign) in the left sidebar.
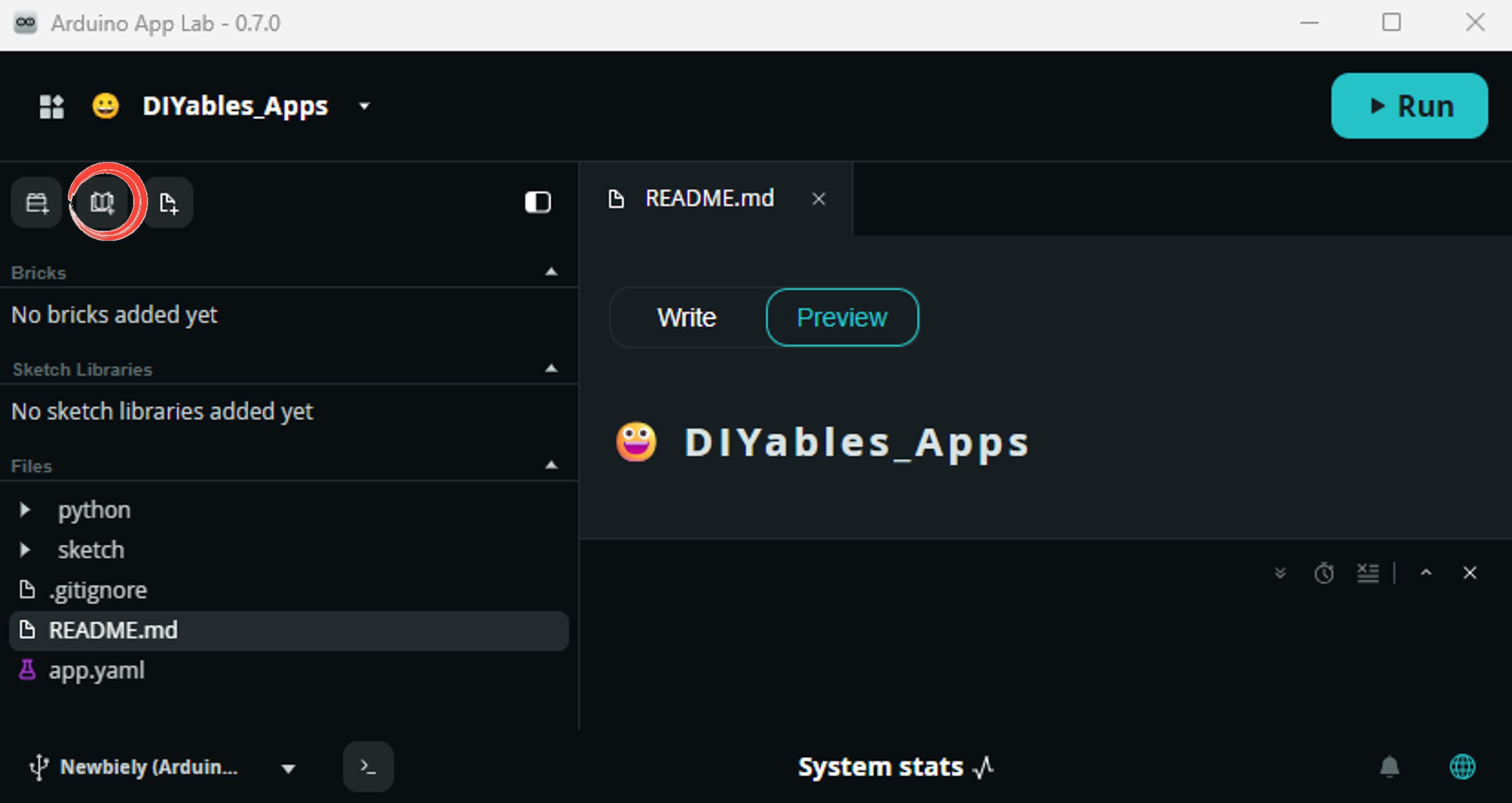
- Search for Arduino_RouterBridge created by Arduino and click the Install button.
- Hochladen: Klicken Sie auf die Schaltfläche Ausführen.
- Platzieren Sie ein Objekt vor dem Sensor und beobachten Sie beide Konsolen.
App Lab Console Ausgabe
Telegram
Erhalten Sie sofortige Telegram-Warnungen, wenn ein Hindernis vor dem Sensor erkannt wird, und fragen Sie seinen Status remote ab.
MCU-Sketch: Behalten Sie denselben MCU-Sketch aus dem vorherigen Bridge-Abschnitt.
Python Code (Telegram)
Schnelle Schritte
- Ersetzen Sie YOUR_TELEGRAM_BOT_TOKEN durch Ihr tatsächliches Bot-Token von BotFather.
- Ersetzen Sie YOUR_CHAT_ID durch Ihre Telegram-Chat-ID.
- Fügen Sie diesen Python-Code in die Python-Datei Ihrer App ein (behalten Sie denselben MCU-Sketch).
- Klicken Sie auf die Schaltfläche Ausführen — platzieren Sie ein Objekt vor dem Sensor, um die Telegram-Benachrichtigung auszulösen.
App Lab Console Ausgabe

ArduinoBot
OpenClaw
You can adapt the OpenClaw to this tutorial by refering the instruction on Arduino Uno Q - OpenClaw Tutorial
Projektideen
Sie können viele nützliche Projekte mit dem IR-Hinderniserkennung Sensor und Arduino UNO Q erstellen:
- Türeingangs-Besucher-Zähler: Montieren Sie den Sensor in einer Türöffnung — jedes Mal, wenn ein Hindernis (Person) vorbeigeht, erhöht sich der Ereigniszähler; der MPU sendet eine Telegram-Zusammenfassung mit der täglichen Anzahl, wenn Sie /count senden
- Paketlieferungsmelder: Platzieren Sie den Sensor vor einem Postfach oder Lieferbereich — wenn ein Paket abgelegt und erkannt wird, sendet Python eine Telegram-Benachrichtigung "Paket geliefert!" an Ihr Telefon
- Roboter-Hindernisstopp: Verbinden Sie den Sensor mit einem motorgetriebenen Roboter — wenn der MCU ein Hindernis erkennt, stoppt er sofort die Motoren; der MPU sendet eine Telegram-Benachrichtigung mit der Hinderniserkennung Zeit
- Automatisierter Gate-Auslöser: Verwenden Sie den Sensor, um ein sich näherndes Fahrzeug zu erkennen — wenn ein Hindernis länger als 200 ms erkannt wird, löst der MCU ein Relais aus, um ein Tor zu öffnen, und Python sendet einen Telegram-Protokolleintrag
- Industrie-Teile-Zähler: Montieren Sie den Sensor auf einem Förderband einer Montagelinie — zählen Sie, wie viele Teile pro Minute vorbeigehen, und senden Sie die Anzahl jede 5 Minuten per Telegram mithilfe eines Python-Timers
Fordern Sie sich selbst heraus
Bereit, noch weiter mit dem IR-Hinderniserkennung Sensor auf Arduino UNO Q zu gehen? Versuchen Sie diese Herausforderungen:
- Einfach: Fügen Sie einen /count Telegram-Befehl hinzu, der zurückgibt, wie viele Hinderniserkennung Ereignisse seit dem Start des Programms aufgetreten sind, nachverfolgt als Zähler im Python-Code.
- Mittel: Implementieren Sie einen Entprellfilter: Ein Hindernis muss mindestens 300 ms lang kontinuierlich erkannt werden, bevor das Ereignis registriert und die Telegram-Benachrichtigung gesendet wird — dies beseitigt falsche Auslöser von Vibrationen oder flackernden Reflexionen.
- Fortgeschrittene: Erstellen Sie einen bidirektionalen Personenzähler: Verwenden Sie zwei IR-Hinderniserkennung Sensoren mit einigen Zentimetern Abstand in einer Türöffnung — bestimmen Sie die Richtung des Ein- oder Ausstiegs basierend darauf, welcher Sensor zuerst ausgelöst wird, und senden Sie eine Telegram-Aktualisierung mit der aktuellen Belegung Count.