Arduino UNO Q - SW520D Neigungssensor
Ein SW520D-Neigungssensor erkennt Orientierungsänderungen und gibt ein digitales Signal aus. Er verwendet einen einfachen Kugelschalter-Mechanismus — keinen Potentiometer oder Analogausgang. Verwenden Sie ihn, um Aktionen auszulösen, wenn ein Objekt geneigt, umgekippt oder bewegt wird. Mit Bridge und Telegram kann Ihr Arduino UNO Q Sie sofort benachrichtigen, wenn Neigung erkannt wird.
In diesem Tutorial lernen Sie:
- Was ein SW520D-Neigungssensor ist und wie er funktioniert
- Wie Sie den SW520D-Neigungssensor mit der Arduino UNO Q MCU verdrahten
- Wie Sie die digitale Ausgabe lesen, um Neigung zu erkennen
- Wie Sie Bridge verwenden, um den Neigungsstatus und Ereignisse der Linux-Seite (Python) freizulegen
- Wie Sie Telegram-Benachrichtigungen erhalten, wenn Neigung auf Arduino UNO Q erkannt wird
- Wie Sie OpenClaw auf Arduino UNO Q mit dem SW520D-Neigungssensor verwenden
Erforderliche Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
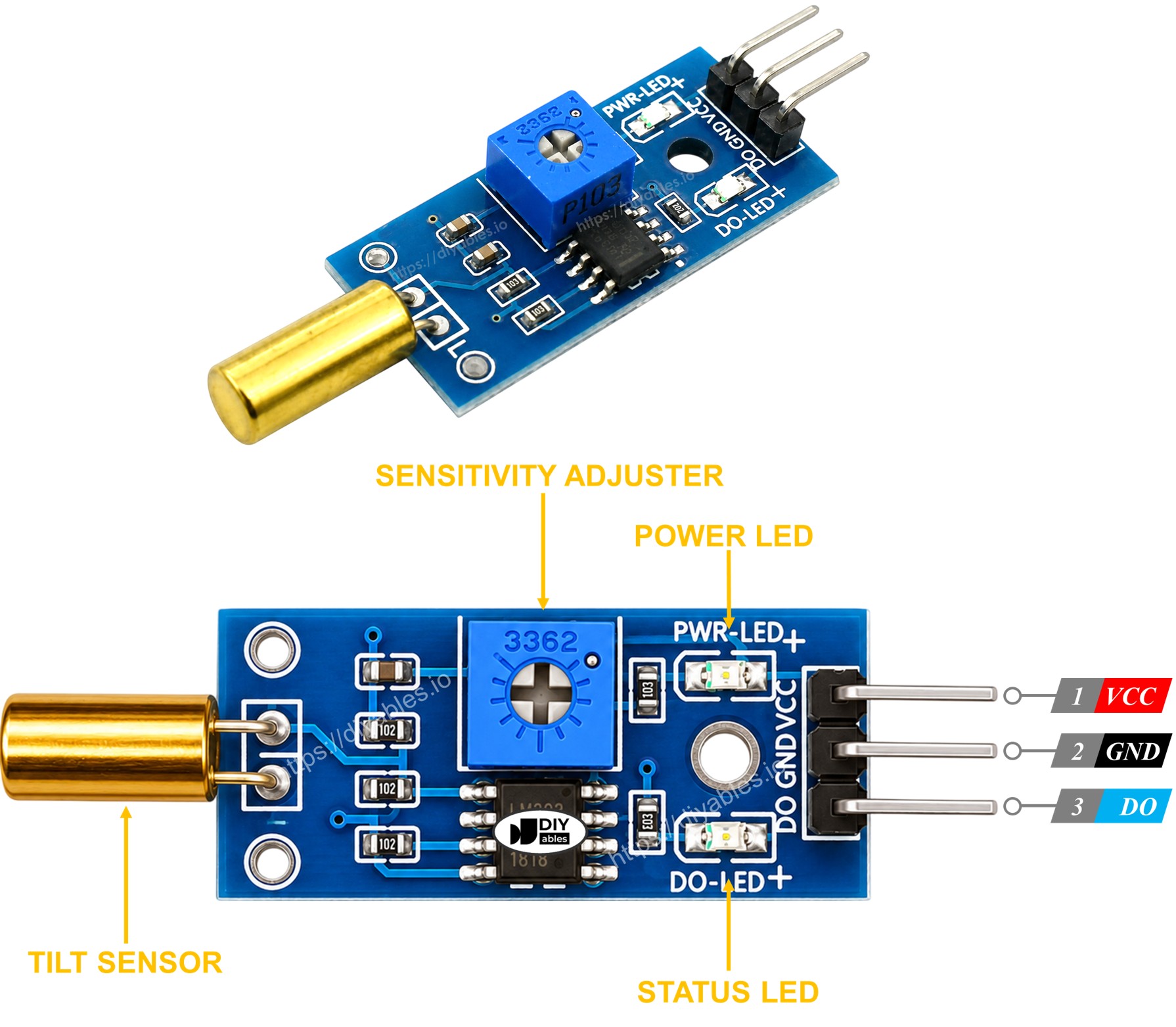
Über den SW520D-Neigungssensor
Ein SW520D-Neigungssensor-Modul erkennt Orientierungsänderungen mit einem kleinen Metallball in einem zylindrischen Gehäuse. Wenn der Sensor aufrecht ist, schließt der Ball den elektrischen Kontakt. Wenn der Sensor geneigt wird, rollt der Ball weg und öffnet den Kontakt. Das Modul gibt ein einfaches digitales Signal aus:
- HIGH: Sensor ist aufrecht — keine Neigung erkannt
- LOW: Sensor ist geneigt — Neigung erkannt
Das Modul besteht aus:
- VCC-Pin: 3,3 V bis 5 V Stromversorgung
- GND-Pin: Masse
- DO-Pin: Digitaler Ausgang — HIGH = aufrecht, LOW = Neigung erkannt
- PWR-LED: Stromanzeige
- Status-LED: Spiegelt den Neigungszustand wider — leuchtet wenn aufrecht, aus wenn geneigt
Schaltplan
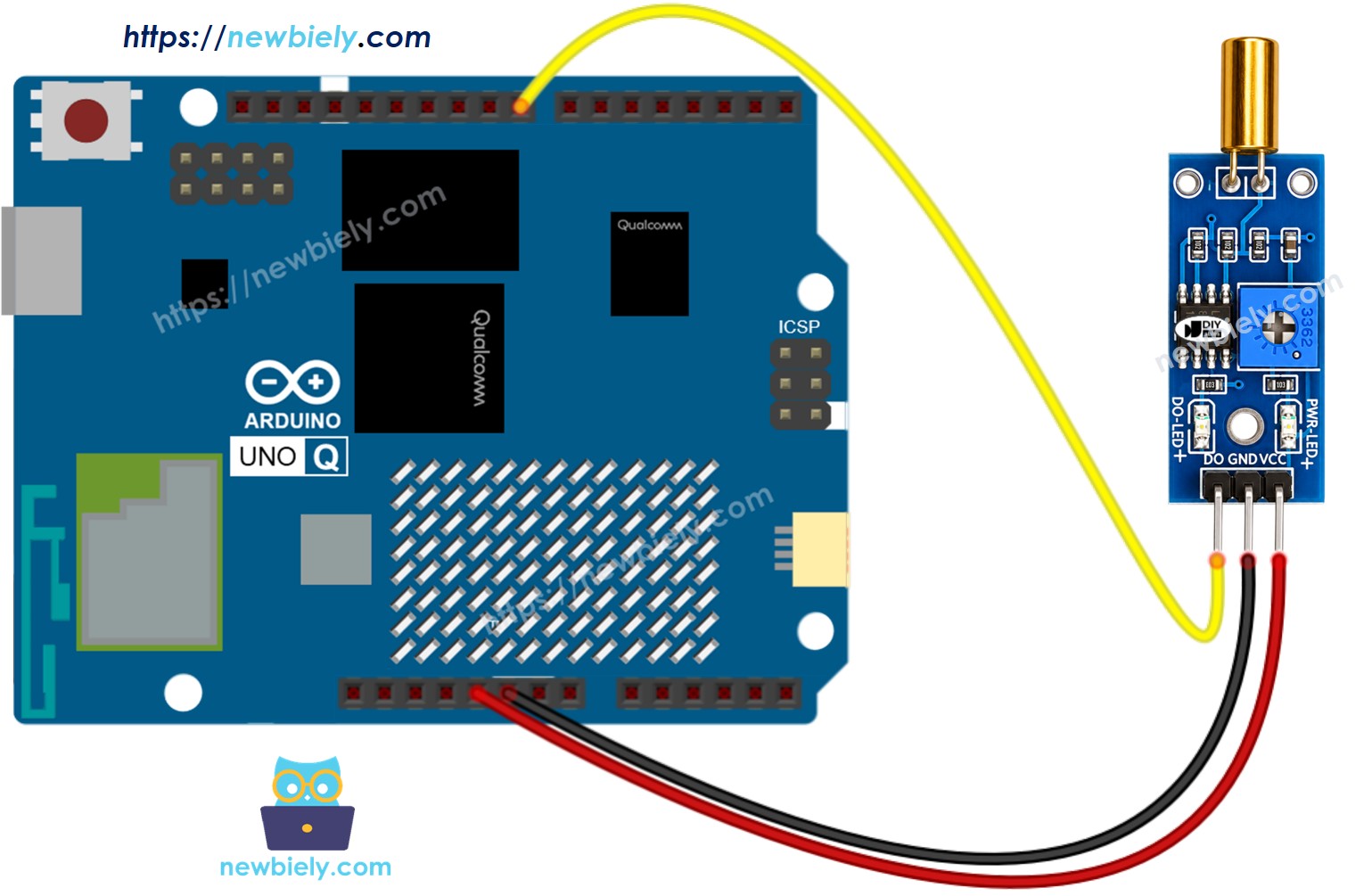
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
| SW520D-Neigungssensor-Pin | Arduino UNO Q MCU |
|---|---|
| GND | GND |
| VCC | 5V |
| DO | D8 |
Programmierung für SW520D-Neigungssensor
- Konfigurieren Sie den Sensor-Pin als digitalen Eingang:
- Lesen Sie die digitale Ausgabe:
- Erkennen Sie Neigungsereignisse, indem Sie mit dem vorherigen Zustand vergleichen:
Arduino UNO Q Code
Arduino UNO Q hat zwei Prozessoren, die zusammenarbeiten:
- Die STM32 MCU liest die digitale Ausgabe des SW520D-Neigungssensors und erkennt Neigungsereignisse
- Die Qualcomm MPU führt Debian Linux mit Wi-Fi aus — in diesem Abschnitt wird nur die MCU programmiert. Ein späterer Abschnitt zeigt, wie beide Prozessoren über Bridge zusammenarbeiten.
Schnelle Schritte
Neu bei Arduino UNO Q? Folgen Sie zunächst dem Arduino UNO Q Einstiegstutorial.
- Verbinden Sie: Verbinden Sie den SW520D-Neigungssensor mit Arduino UNO Q MCU wie im Schaltplan gezeigt.
- Öffnen Sie Arduino App Lab: Starten Sie Arduino App Lab und warten Sie, bis es Ihr Arduino UNO Q erkennt.
- Erstellen Sie eine neue App: Klicken Sie auf die Schaltfläche Neue App erstellen.
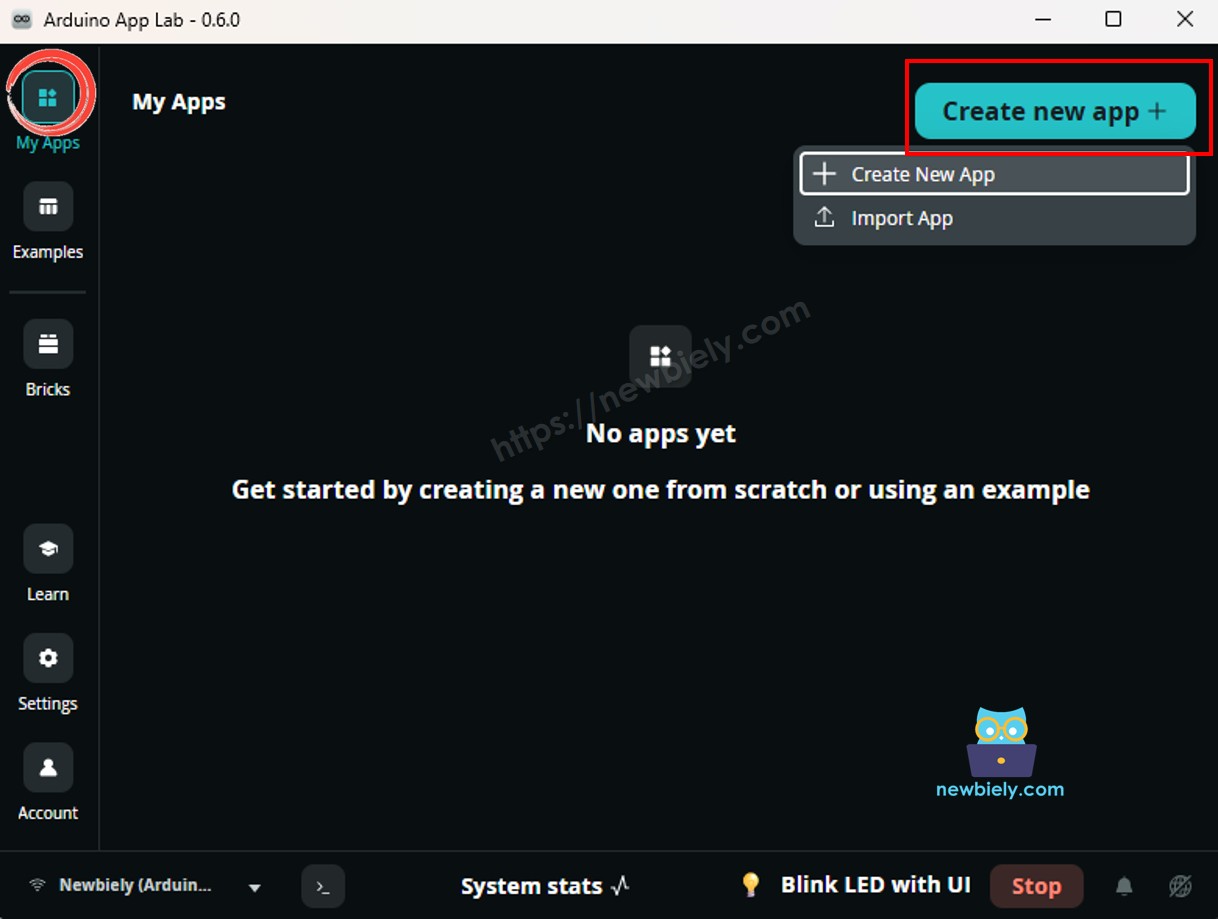
- Geben Sie der App einen Namen, z. B.: SW520DTiltSensor
- Klicken Sie auf Erstellen, um zu bestätigen.
- Fügen Sie die Skizze ein: Kopieren Sie den MCU-Code oben und fügen Sie ihn in sketch/sketch.ino ein.
- Hochladen: Klicken Sie auf die Schaltfläche Ausführen in Arduino App Lab.
- Neigen Sie den Sensor hin und her — beobachten Sie die Ausgabe des seriellen Monitors.
- Stellen Sie sicher, dass der Sensor in der korrekten aufrechten Position für zuverlässige Erkennung montiert ist.
Ausgabe der Arduino App Lab-Konsole
Bridge: Linux + MCU
Dieser Abschnitt zeigt, wie Sie beide Prozessoren des Arduino UNO Q programmieren, damit die Linux-Seite den Neigungsstatus lesen und Neigungsereignisse über Bridge empfangen kann:
- Der SW520D-Neigungssensor ist mit der MCU verbunden — die MCU überwacht die digitale Ausgabe kontinuierlich und speichert den aktuellen Zustand zwischen
- Die MPU kann den Sensor-Pin nicht direkt lesen — Sie ruft Bridge-Funktionen auf, um den aktuellen Zustand abzurufen oder auf neue Neigungsereignisse zu prüfen
- Die MPU hat Wi-Fi — Sie führt vollständiges Debian Linux aus und kann Telegram-Benachrichtigungen sofort senden, wenn Neigung erkannt wird
- Arduino_RouterBridge ermöglicht RPC-Kommunikation zwischen den beiden Prozessoren
- ⚠️ /dev/ttyHS1 (Linux) und Serial1 (MCU) sind RESERVIERT vom Router — öffnen Sie diese niemals in Benutzercode
Kurz gesagt: MCU erkennt Neigung über DO-Pin → setzt Ereignis-Flag → MPU pollte Bridge → MPU sendet Telegram-Benachrichtigung.
MCU Code (Bridge)
Python-Code (Bridge)
Schnelle Schritte
- Verbinden Sie: Verbinden Sie den SW520D-Neigungssensor mit Arduino UNO Q wie im Schaltplan gezeigt.
- Öffnen Sie Arduino App Lab und erstellen Sie eine neue App mit dem Namen TiltSensorBridge.
- Fügen Sie die MCU-Skizze in sketch/sketch.ino ein.
- Fügen Sie den Python-Code in die Python-Datei ein.
- Install the library: Click the Add sketch library button (the open book icon with a + sign) in the left sidebar.
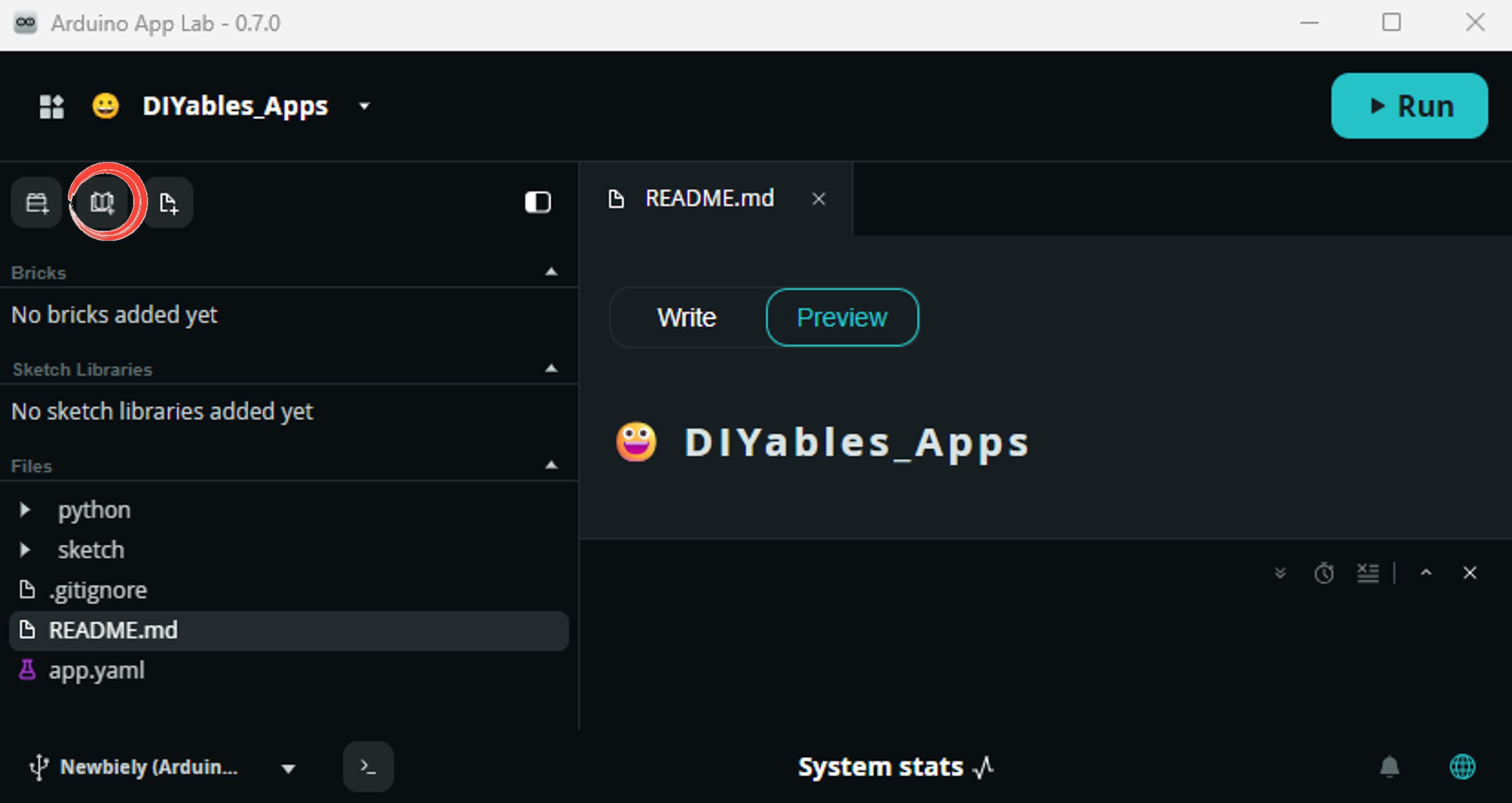
- Search for Arduino_RouterBridge created by Arduino and click the Install button.
- Hochladen: Klicken Sie auf die Schaltfläche Ausführen.
- Neigen Sie den Sensor — beobachten Sie, dass das Ereignis in beiden Konsolen angezeigt wird.
Ausgabe der Arduino App Lab-Konsole
Telegram
Erhalten Sie sofortige Telegram-Benachrichtigungen, wenn Neigung auf dem Arduino UNO Q SW520D-Neigungssensor erkannt wird.
MCU-Skizze: Behalten Sie die gleiche MCU-Skizze aus dem vorherigen Bridge-Abschnitt bei.
Python-Code (Telegram)
Schnelle Schritte
- Ersetzen Sie YOUR_TELEGRAM_BOT_TOKEN durch Ihren tatsächlichen Bot-Token von BotFather.
- Ersetzen Sie YOUR_CHAT_ID durch Ihre Telegram-Chat-ID.
- Fügen Sie diesen Python-Code in die Python-Datei Ihrer App ein (behalten Sie die gleiche MCU-Skizze bei).
- Klicken Sie auf die Schaltfläche Ausführen — neigen Sie den Sensor, um eine Telegram-Benachrichtigung auszulösen.
Ausgabe der Arduino App Lab-Konsole

ArduinoBot
OpenClaw
You can adapt the OpenClaw to this tutorial by refering the instruction on Arduino Uno Q - OpenClaw Tutorial
Projektideen
Sie können viele nützliche Projekte mit dem SW520D-Neigungssensor und Arduino UNO Q erstellen:
- Anti-Tamper-Warnung: Befestigen Sie den Sensor an einem Gehäuse — wenn er geneigt oder bewegt wird, sendet die MPU sofort eine Telegram-Benachrichtigung mit Zeitstempel, damit Sie wissen, wann Manipulation erfolgt ist
- Neigung-aktivierter Schalter: Verwenden Sie den Neigungssensor mit einem Relais über Bridge — Python erkennt das Neigungsereignis und schaltet eine Leuchte oder einen Ventilator je nach Ausrichtung ein oder aus
- Ausrüstungsüberwachung: Montieren Sie den Sensor auf Maschinen oder Möbeln — die MPU protokolliert jedes Neigungsereignis in einer CSV-Datei unter Linux und sendet am Ende des Tages einen Telegram-Bericht
- Smart-Safe-Warnung: Kombinieren Sie den Neigungssensor mit einem Türsensor — Telegram-Benachrichtigungen, wenn entweder die Safe-Tür geöffnet wird oder der Safe selbst bewegt wird
- RC-Neigungscontroller: Verwenden Sie zwei SW520D-Sensoren auf verschiedenen Achsen montiert — die MPU liest beide Zustände über Bridge und sendet Orientierungsbefehle zur Steuerung eines Remote-Geräts über Wi-Fi