Arduino UNO Q - Potentiometer steuert Servomotor
Dieses Tutorial zeigt, wie Sie den Winkel eines Servomotors mit einem Potentiometer mit Arduino UNO Q steuern. Durch Drehen des Potentiometer-Knopfs dreht sich der Servomotor proportional von 0° bis 180°.
※ Notiz:
Arduino UNO Q ADC-Unterschied: Der STM32 MCU auf Arduino UNO Q hat einen 12-Bit-ADC (Werte 0–4095), nicht 10-Bit (0–1023). Bilden Sie ADC-Werte von 0–4095 auf den Servomotor-Winkel 0–180 Grad ab.
Erforderliche Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Kaufhinweis: Falls Sie mehrere Servomotoren verwenden möchten, empfehlen wir die Verwendung des PCA9685 16 Channel PWM Servo Driver Module, um MCU-Pins zu sparen und die Verdrahtung zu vereinfachen.
Über das Potentiometer und den Servomotor
Wenn Sie mit dem Potentiometer oder dem Servomotor neu sind, schauen Sie sich zunächst diese Tutorials an:
Schaltplan
- Bei Verwendung des grundlegenden Potentiometers:
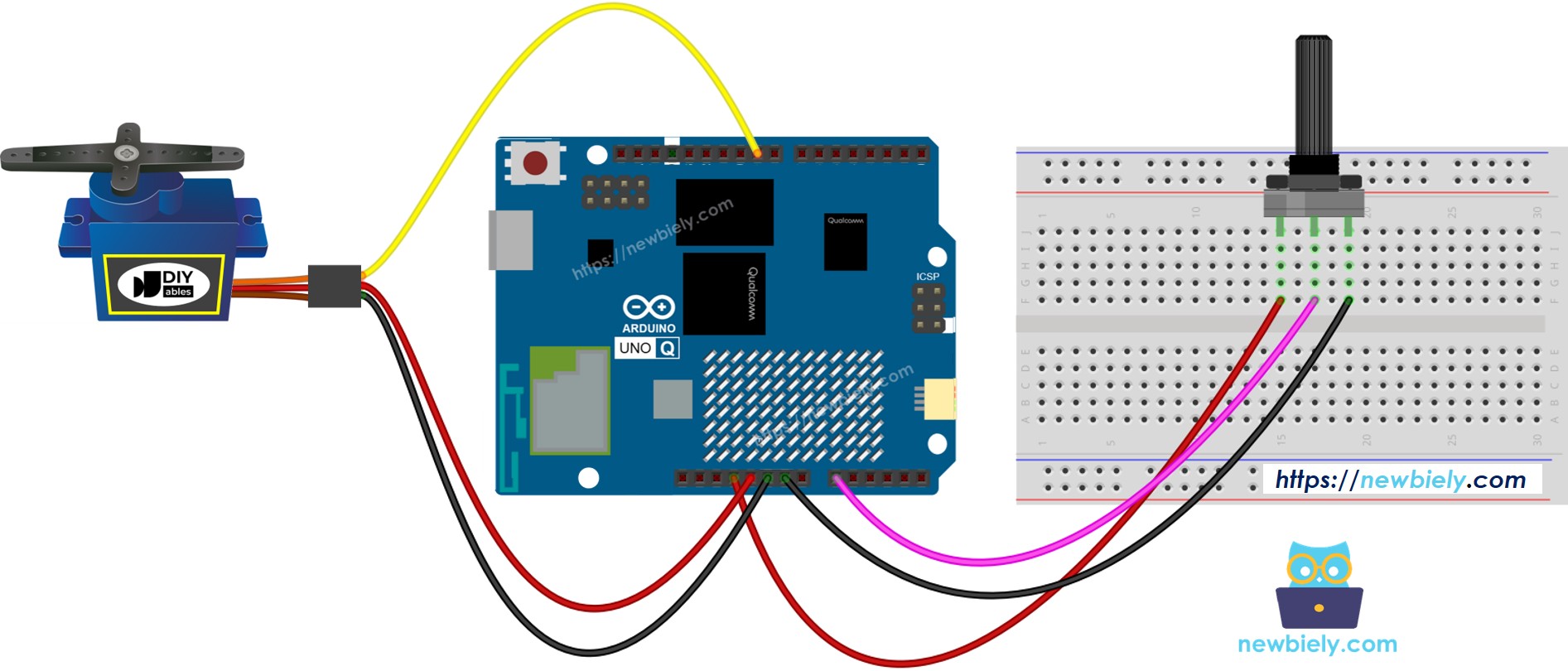
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
- Bei Verwendung des Potentiometermoduls:
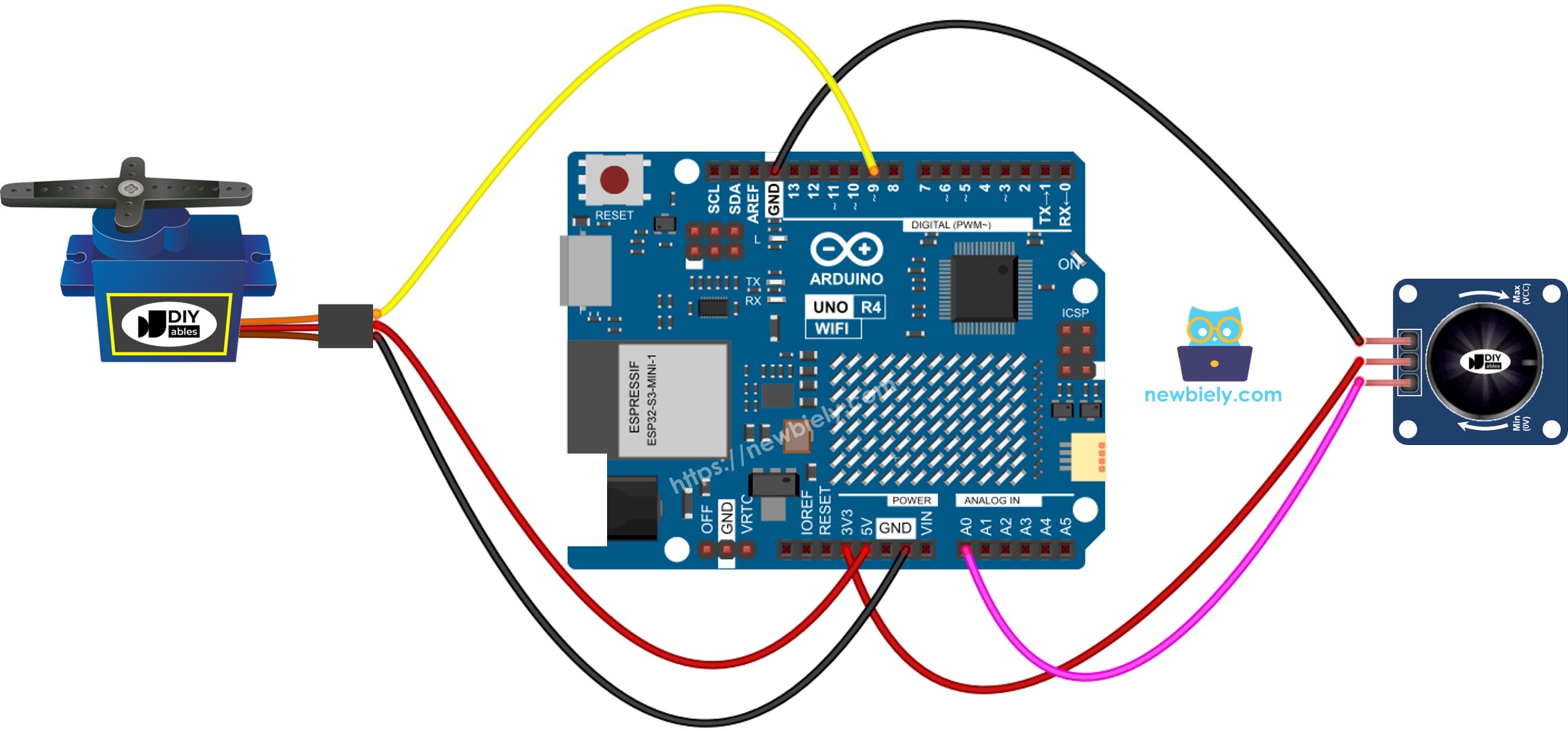
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
Programmieranleitung
- Lesen Sie den ADC-Wert vom Potentiometer aus (12-Bit auf Arduino UNO Q, 0–4095):
- Bilden Sie den ADC-Wert auf den Servomotor-Winkel ab (0–180 Grad):
- Bewegen Sie den Servomotor zum berechneten Winkel:
MCU-Code — Potentiometer steuert Servomotor
Arduino UNO Q hat zwei Prozessoren: die STM32 MCU (verwaltet echtzeitige Hardwaresteuerung) und die Qualcomm MPU (läuft Debian Linux). In diesem Abschnitt wird nur der STM32 MCU programmiert — die Linux-Seite bleibt untätig. Ein späterer Abschnitt zeigt, wie beide Prozessoren zusammenarbeiten.
Schnelle Schritte
- Erstes Mal mit Arduino UNO Q? Folgen Sie dem Tutorial Erste Schritte mit Arduino UNO Q, um Ihre Entwicklungsumgebung vorzubereiten, bevor Sie fortfahren.
- Verdrahten Sie die Komponenten: Verbinden Sie die Potentiometerausgangsleitung mit A0, GND mit GND, VCC mit 3,3 V. Verbinden Sie das Servosignal mit Pin 9 gemäß dem Schaltplan.
- Verbinden: Stecken Sie die Arduino UNO Q mit einem USB-C-Kabel in Ihren Computer ein.
- Öffnen Sie Arduino App Lab: Starten Sie Arduino App Lab und warten Sie, bis es Ihre Arduino UNO Q erkennt.
- Erstellen Sie eine neue App: Klicken Sie auf die Schaltfläche Neue App erstellen.
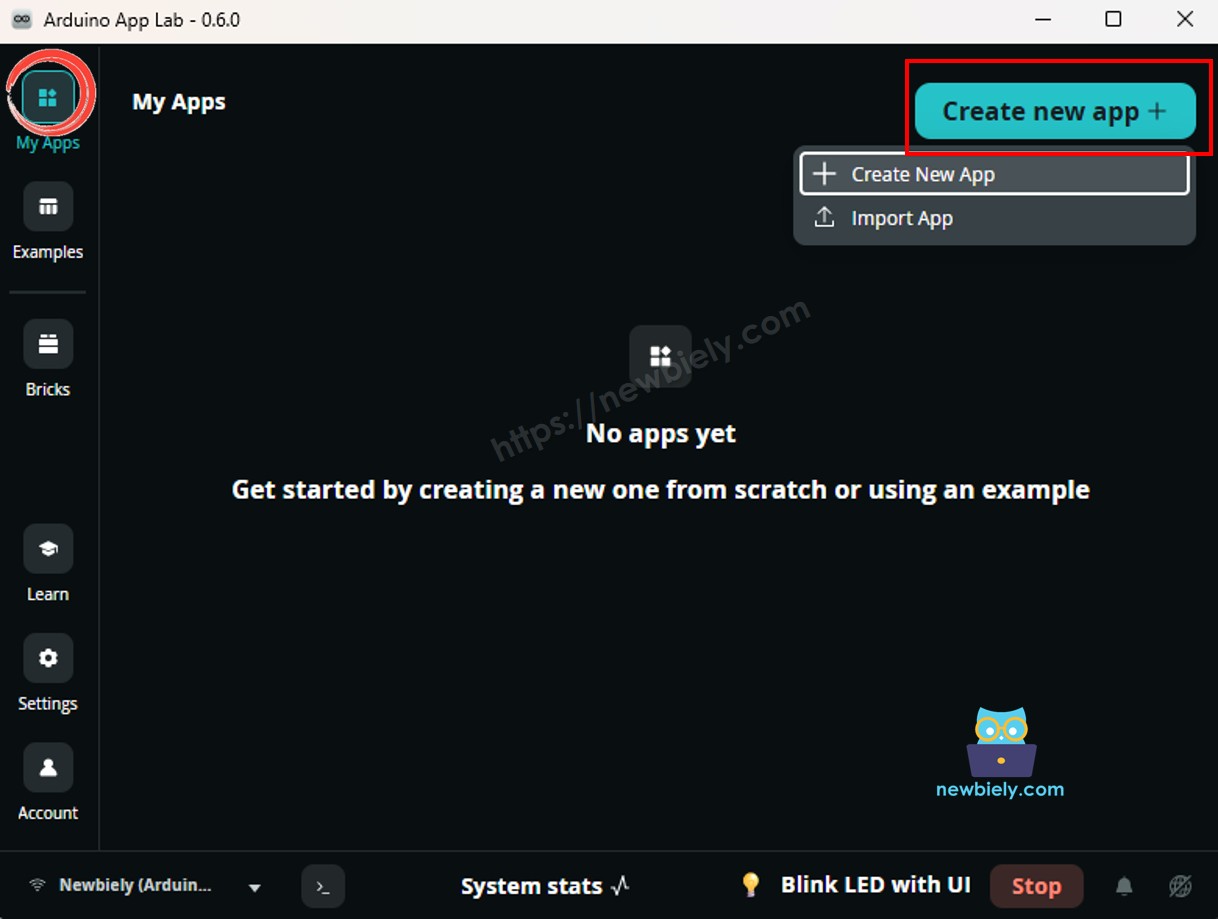
- Geben Sie der App einen Namen, z. B.: DIYables_PotServo
- Klicken Sie auf Erstellen, um zu bestätigen.
- Sie sehen einen Satz von Ordnern und Dateien, die in Ihrer neuen App generiert werden.
- Finden Sie die Datei sketch/sketch.ino — hier fügen Sie die MCU-Skizze ein.
- Install the library: Click the Add sketch library button (the open book icon with a + sign) in the left sidebar.
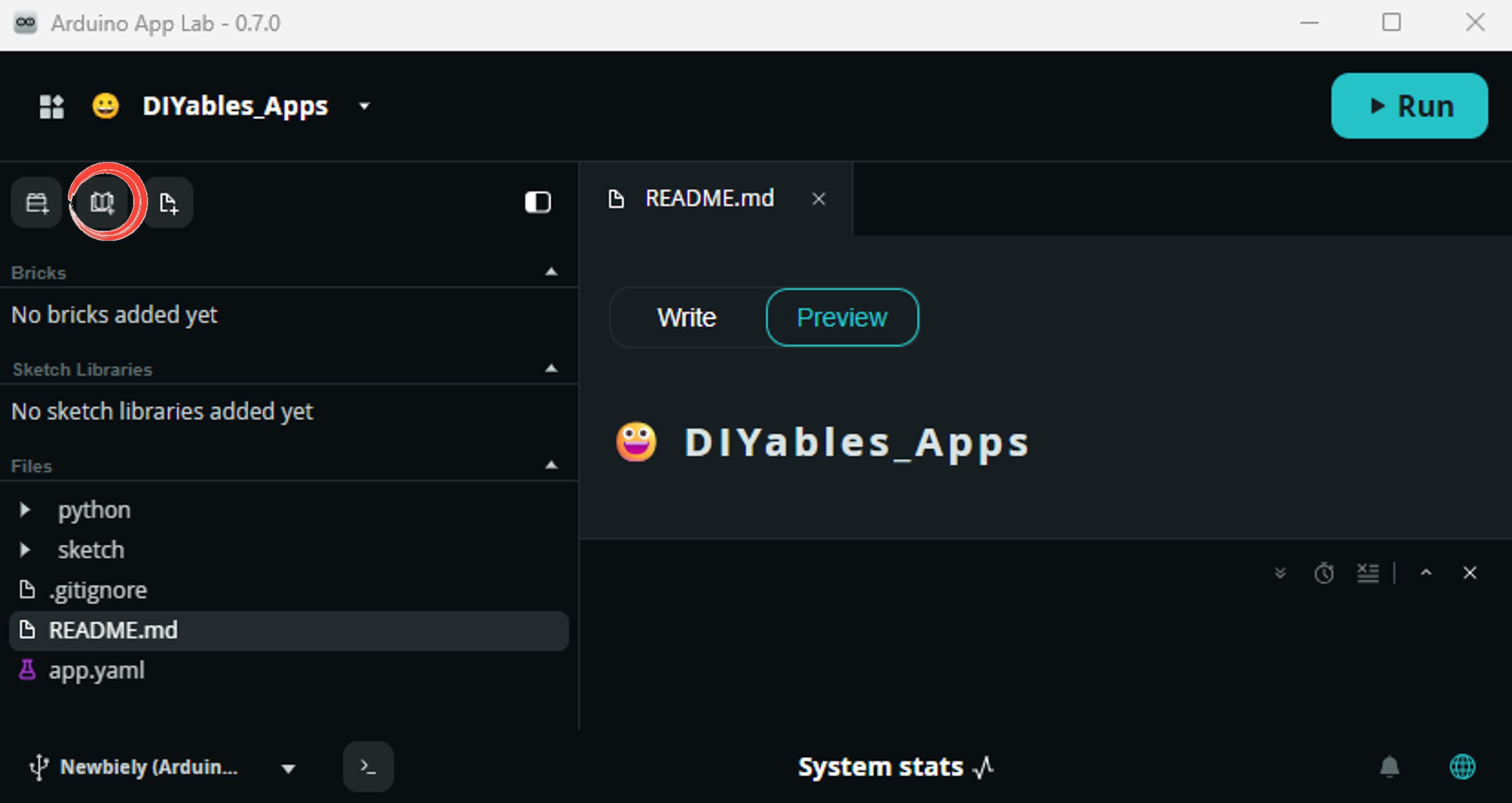
- Search for Arduino_RouterBridge created by Arduino and click the Install button.
- Upload: Klicken Sie auf die Ausführungsschaltfläche im Arduino App Lab, um zu kompilieren und auf den STM32 hochzuladen.
- Drehen Sie den Potentiometer-Knopf — der Servomotor sollte die Position des Knopfes reibungslos von 0° bis 180° nachfahren.
Linux + MCU Bridge-Programmierung
Arduino UNO Q hat zwei Prozessoren, die zusammenarbeiten: die MPU (Qualcomm, läuft Debian Linux) und die MCU (STM32, läuft Zephyr OS mit Ihrer Arduino-Skizze). Sie kommunizieren über RPC über die Arduino_RouterBridge-Bibliothek — niemals über rohe serielle Ports.
- Das Potentiometer und der Servomotor sind mit der MCU (STM32) verbunden — die Potentiometerausgangsleitungen sind mit A0 verbunden und das Servosignal mit Pin 9. Der MCU liest kontinuierlich ADC-Werte und aktualisiert den Servomotor-Winkel in loop().
- Die MPU kann das Potentiometer nicht lesen oder den Servomotor direkt steuern — sie muss den aktuellen Servomotor-Winkel vom MCU über Bridge.call() anfordern.
- Die MPU hat Wi-Fi — da die MPU vollständiges Debian Linux mit Wi-Fi ausführt, kann es den Servomotor-Winkel bei Bedarf über Telegram melden.
- Kommunikation: Bridge.call() auf der Linux-Seite ruft Bridge.provide()-Funktionen auf der MCU-Seite auf
- ⚠️ Reserviert: /dev/ttyHS1 (Linux) und Serial1 (MCU) werden vom Arduino Router verwendet — öffnen Sie sie niemals direkt
Kurz gesagt: MPU fordert Servomotor-Winkel an → MCU liest ADC und konvertiert → MCU meldet ADC und Winkel → MPU protokolliert oder leitet weiter.
MCU-Skizze — Potentiometer-Servomotor mit Bridge und Monitor-Ausgang:
Python-Skript (Arduino App Lab) — Servomotor-Winkel vom Linux-System abrufen:
- Hinweis: Vergewissern Sie sich, dass Bridge.begin() in der MCU-Skizze aufgerufen wird und die Skizze hochgeladen ist, bevor Sie das Python-Skript auf der Linux-Seite ausführen.
- ⚠️ Warnung: Öffnen Sie niemals direkt /dev/ttyHS1 (auf Linux) oder verwenden Sie Serial1 (auf MCU) in Ihrem Code — diese sind vom Arduino Router reserviert, und der Zugriff darauf bricht die Bridge.
Schnelle Schritte
- MCU-Skizze hochladen: Öffnen Sie Arduino App Lab, erstellen Sie eine neue App, fügen Sie die Bridge MCU-Skizze oben in sketch/sketch.ino ein, installieren Sie die Servo- und Arduino_RouterBridge-Bibliotheken, und klicken Sie auf Ausführen.
- Fügen Sie das Python-Skript hinzu: Fügen Sie den Python-Code oben in die Python-Registerkarte derselben App ein.
- Führen Sie die App aus: Klicken Sie auf Ausführen — die Python-Seite fragt den Servomotor-Winkel jede Sekunde ab.
- Drehen Sie den Potentiometer-Knopf und beobachten Sie, wie der Servomotor die Position des Knopfes nachfahrt.
- Überprüfen Sie die Konsole: Öffnen Sie die Registerkarte Konsole → Unterregisterkarte MCU Monitor, um die ADC- und Winkelwerte protokolliert zu sehen.
App Lab Konsolenausgabe
Telegram-Integration
Überprüfen Sie den aktuellen Servomotor-Winkel remote von überall über Telegram.
Wenn Sie noch keinen Telegram-Bot haben, siehe Wie man einen Telegram-Bot erstellt, um Ihr Bot-Token vor dem Fortfahren zu erhalten.
MCU-Skizze: Behalten Sie die gleiche MCU-Skizze aus dem vorherigen Bridge-Abschnitt — keine Änderungen erforderlich. Vergewissern Sie sich, dass sie bereits auf dem STM32 hochgeladen und ausgeführt wird, bevor Sie fortfahren.
Python-Skript (Arduino App Lab) — Telegram-Bot für Servomotor-Winkel:
- Hinweis: Ersetzen Sie YOUR_BOT_TOKEN mit dem Token, das Sie von @BotFather auf Telegram erhalten haben.
- Senden Sie /angle, um den aktuellen Servomotor-Winkel basierend auf der Potentiometerposition zu überprüfen.
Schnelle Schritte
- MCU-Skizze hochladen: Verwenden Sie die Bridge MCU-Skizze aus dem vorherigen Abschnitt (laden Sie sie zuerst hoch, falls nicht bereits geschehen).
- Fügen Sie das Telegram-Skript ein: Kopieren Sie den Python-Code oben in die Python-Registerkarte Ihrer App im Arduino App Lab.
- Legen Sie Ihr Token fest: Ersetzen Sie YOUR_BOT_TOKEN im Skript mit Ihrem aktuellen Bot-Token.
- Führen Sie die App aus: Klicken Sie auf Ausführen — der Bot beginnt, auf Telegram-Nachrichten zu lauschen.
- Testen Sie es: Drehen Sie das Potentiometer, senden Sie /angle — der Bot antwortet mit dem ADC-Wert und dem Servomotor-Winkel.
App Lab Python-Konsolenausgabe

ArduinoBot
OpenClaw-Integration
Sie können den OpenClaw an dieses Tutorial anpassen, indem Sie die Anleitung im Tutorial Arduino Uno Q - OpenClaw beachten
Anwendungs-/Projektideen
- Kameraschwenkssteuerung: Verwenden Sie ein Potentiometer als physischen Schwenkjoystick für eine Servo-gesteuerte Kamera — überprüfen Sie die Position über Telegram
- Roboterarmgelenk: Steuern Sie ein Roboterarmgelenk manuell mit einem Potentiometer
- Remote-Antennenpositiotierer: Verwenden Sie ein Potentiometer, um eine Antenne mit einem Servomotor auszurichten — überprüfen Sie den Winkel über Telegram
- Ventil-Durchsatzregler: Bilden Sie ein Potentiometer auf ein Servo-betätigtes Ventil ab — überprüfen Sie den Ventilöffnungsprozentsatz remote
- Interaktive Skala: Erstellen Sie eine physische Schnittstelle, bei der eine Skala einen visuellen Indikator durch einen Servomotor steuert
Fordern Sie sich selbst heraus
- Leicht: Fügen Sie zwei Potentiometer hinzu (A0 und A1), die jeweils einen separaten Servomotor an zwei verschiedenen Pins steuern
- Mittel: Setzen Sie ADC-Wert und Winkel als separate Bridge-Callbacks frei: get_adc() und get_angle()
- Erweitert: Erstellen Sie einen Telegram-Bot, der Sie automatisch benachrichtigt, wenn sich der Servomotor um mehr als 15° vom zuletzt aufgezeichneten Winkel bewegt — verwenden Sie eine Überwachungsschleife in Python