Arduino UNO R4 - Aktuator
Entdecken Sie, wie Sie den Arduino Uno R4 verwenden, um einen Linearantrieb in diesem einfachen Tutorial zu steuern! Perfekt für Anfänger zeigt dieser Leitfaden, wie man einen L298N-Treiber für unterhaltsame DIY-Projekte verwendet. Das lernen Sie:
- Was ein Linearantrieb ist und wie er sich bewegt
- Einfache Schritte, um den Linearantrieb auszufahren oder einzufahren
- Einfache Verkabelung mit dem L298N-Treiber
- Klarer Arduino-Code zur Steuerung des Linearantriebs
- Wie man die Geschwindigkeit des Linearantriebs ändert, damit er schneller oder langsamer läuft
Dieses Tutorial handelt von linearen Stellantrieben ohne Rückmeldung. Wenn Sie mehr über lineare Stellantriebe mit Rückmeldung lernen möchten, besuchen Sie unseren Arduino UNO R4 - Stellantrieb mit Rückmeldung Leitfaden. Folgen Sie diesem einfachen Arduino-Projekt, um Ihr eigenes intelligentes Automatisierungssystem zu bauen!
Erforderliche Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables STEM V4 IoT Starter-Kit (Arduino enthalten) | |
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Über Linearantrieb
Linearantrieb Pinbelegung
Ein Linearantrieb wird mit zwei Drähten geliefert.
- Positiver Draht: oft rot
- Negativer Draht: oft schwarz

Wie es funktioniert
Beim Kauf eines Linearantriebs ist es wichtig zu verstehen, auf welche Spannung er ausgelegt ist. Zum Beispiel ein Linearantrieb, der 12 Volt verwendet.
Wenn Sie den 12-V-Linearantrieb an eine 12-V-Stromversorgung anschließen:
- Verbinde 12V mit dem Plusdraht und GND mit dem Minusdraht: Der Linearantrieb fährt vollständig mit hoher Geschwindigkeit aus, bis er am Anschlag stoppt.
- Verbinde 12V mit dem Minusdraht und GND mit dem Plusdraht: Der Linearantrieb fährt vollständig mit hoher Geschwindigkeit ein, bis er am Anschlag stoppt.
Wenn du die Stromversorgung des Aktuators unterbrichst, indem du sowohl den positiven als auch den negativen Draht mit der Erdung verbindest, hört der Aktuator auf, ein- oder auszufahren.
※ Notiz:
Bei Gleichstrommotoren, Servomotoren und Schrittmotoren ohne Getriebe können sie ihre Position nicht beibehalten, wenn die Stromversorgung ausgeschaltet ist und sie eine Last tragen. Ein Aktuator hingegen kann seine Position auch ohne Strom beibehalten, wenn er eine Last trägt.
Wenn wir weniger als 12 V für Linearantriebe verwenden, funktionieren sie zwar, aber nicht mit der höchsten Geschwindigkeit. Das zeigt, dass eine Änderung der Versorgungsspannung die Geschwindigkeit des Linearantriebs beeinflussen kann. Allerdings ist eine präzise Spannungssteuerung schwierig, daher wird diese Methode nicht häufig verwendet. Stattdessen wird die Spannung konstant gehalten und die Geschwindigkeit des Linearantriebs wird mithilfe eines PWM-Signals gesteuert. Wenn das PWM-Tastverhältnis höher ist, bewegt sich der Linearantrieb schneller.

Wie man einen Linearantrieb mit Arduino Uno R4 steuert
Um einen Linearantrieb zu steuern, möchten wir normalerweise:
- Lass es mit voller Geschwindigkeit ausfahren.
- Lass es mit voller Geschwindigkeit einfahren.
- (Optional) Steuere, wie schnell es ein- oder ausfährt.
Der Arduino kann Steuersignale senden, aber diese Signale sind zu schwach (niedrige Spannung und Stromstärke), um den Aktuator direkt zu bewegen. Deshalb benötigen wir einen Treiber zwischen dem Arduino und dem Aktuator.
Der Fahrer hat zwei Hauptaufgaben:
- Es verstärkt das Arduino-Signal, damit es den Aktuator antreiben kann.
- Es schaltet die Stromrichtung um (durch Ändern der Polarität) basierend auf einem weiteren Signal vom Arduino — dies steuert, ob der Aktuator ausfährt oder einfährt.
※ Notiz:
- Sie können diese Anleitung für jeden Linearantrieb verwenden. Wir verwenden als Beispiel einen 12-V-Linearantrieb.
- Bei der Verwendung eines 5-V-Linearantriebs mit einem Arduino UNO R4, obwohl beide 5V verwenden, müssen Sie einen Treiber hinzufügen. Das liegt daran, dass der Arduino UNO R4 nicht genügend Strom für den Antrieb liefern kann.
Dieser Leitfaden verwendet den L298N-Treiber, aber es gibt verschiedene andere Chips und Module, wie zum Beispiel L293D, die ebenfalls Linearantriebe steuern können.
Über den L298N-Treiber
Der L298N-Treiber kann Geräte wie Linearantriebe, Gleichstrommotoren und Schrittmotoren steuern. In diesem Tutorial zeigen wir, wie man ihn verwendet, um einen Linearantrieb zu steuern.
Pinbelegung des L298N-Treibers
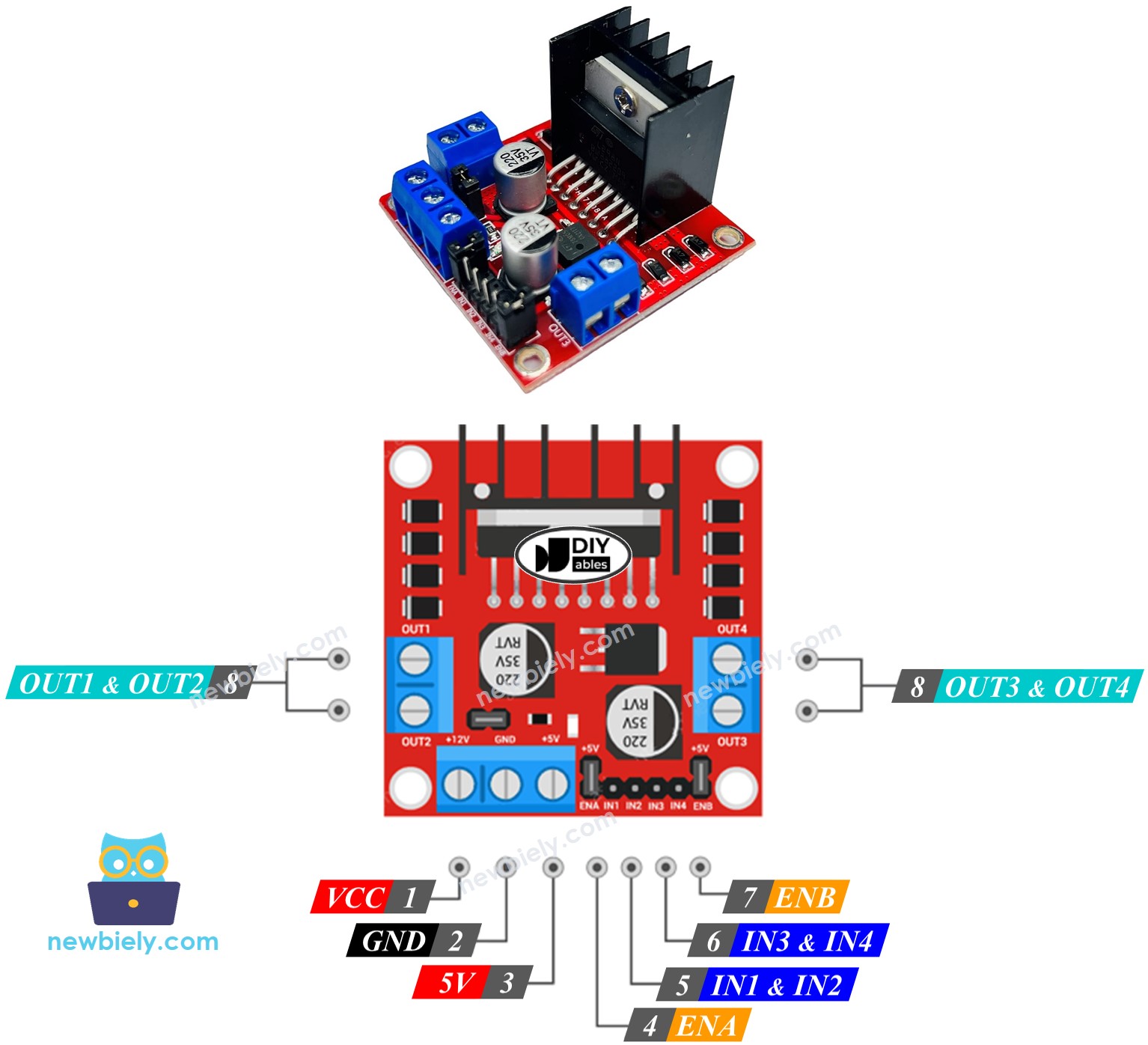
Der L298N-Treiber verfügt über zwei getrennte Kanäle, die als Kanal A und Kanal B bekannt sind. Dieses Setup ermöglicht es dem L298N-Treiber, zwei verschiedene Linearantriebe unabhängig und gleichzeitig zu steuern. Angenommen, der Linearantrieb A ist Kanal A zugeordnet und der Linearantrieb B Kanal B. Der L298N-Treiber verfügt über 13 Pins.
Die gemeinsamen Pins für beide Kanäle:
- VCC-Pin: versorgt den Linearantrieb mit Strom. Er akzeptiert einen Bereich von 5 bis 35 V.
- GND-Pin: dient als gemeinsame Masse und sollte mit GND (0 V) verbunden werden.
- 5V-Pin: versorgt das L298N-Modul mit Strom. Dafür kann man 5V von einem Arduino UNO R4 verwenden.
Kanal A Pins:
- ENA-Anschlüsse dienen dazu, zu steuern, wie schnell sich der Linearantrieb A bewegt. Wenn Sie den Jumper abziehen und diesen Anschluss mit einem PWM-Eingang verbinden, können Sie die Geschwindigkeit einstellen, mit der er ausfährt oder einfährt.
- IN1- und IN2-Anschlüsse bestimmen die Richtung, in der sich der Linearantrieb bewegt. Wenn einer der Anschlüsse HIGH ist und der andere LOW, fährt der Linearantrieb entweder aus oder ein. Wenn beide HIGH oder beide LOW sind, stoppt der Linearantrieb.
- OUT1- und OUT2-Anschlüsse sind mit dem Linearantrieb A verbunden.
Kanal B Pins:
- ENB-Pins: Diese Pins regeln die Geschwindigkeit des linearen Aktuators B. Trennen Sie den Jumper und verwenden Sie an diesem Pin einen PWM-Eingang, um zu steuern, wie schnell sich der lineare Aktuator B aus- bzw. einfährt.
- IN3- und IN4-Pins: Diese Pins bestimmen die Bewegungsrichtung eines linearen Aktuators. Ist ein Pin HIGH und der andere LOW, fährt der lineare Aktuator entweder aus oder ein. Sind beide Pins HIGH oder LOW, stoppt der lineare Aktuator.
- OUT3- und OUT4-Pins: Sie sind mit einem linearen Aktuator verbunden.
Der L298N-Motortreiber hat zwei Arten von Eingangsspannungen:
- Eine für den Linearantrieb (VCC- und GND-Pins): von 5 bis 35 V.
- Eine für den internen Betrieb des L298N-Moduls (5V- und GND-Pins): von 5 bis 7 V.
Der L298N-Treiber wird mit drei Jumpers für spezielle oder andere Verwendungen geliefert. Zur Vereinfachung entfernen Sie bitte alle Jumpers vom L298N-Treiber.
Wir können zwei Linearantriebe unabhängig und gleichzeitig mit einem Arduino UNO R4 und einem L298N-Treiber steuern. Um jeden Linearantrieb zu betreiben, benötigen wir lediglich drei Pins des Arduino UNO R4.
※ Notiz:
Dieser Teil des Leitfadens zeigt, wie man Kanal A verwendet, um einen Linearantrieb zu steuern. Die Steuerung eines weiteren Linearantriebs erfolgt auf ähnliche Weise.
Wie man einen Linearantrieb steuert
Wir werden lernen, wie man den L298N-Treiber verwendet, um einen Linearantrieb zu steuern.
Schaltplan
Bevor Sie mit dem Verdrahten beginnen, entfernen Sie alle drei Jumper vom L298N-Modul.
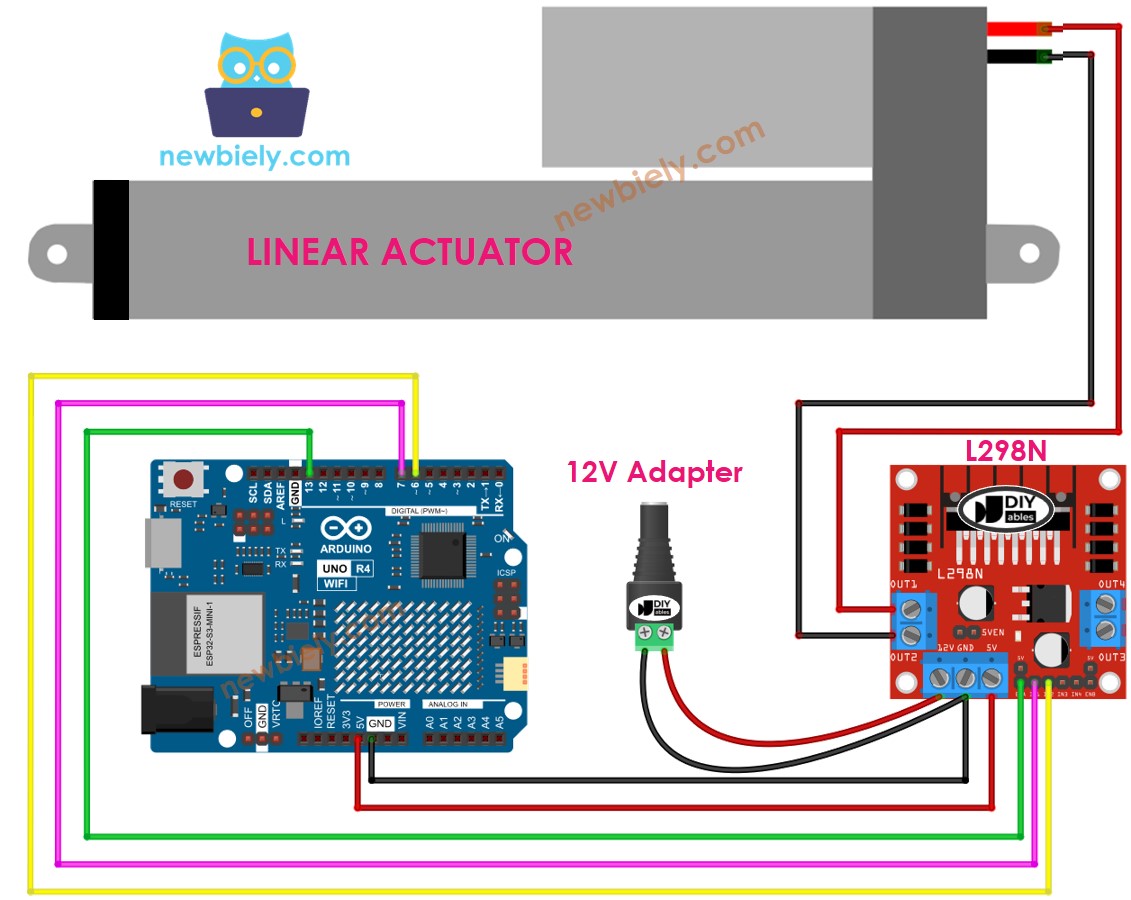
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
Siehe Der beste Weg, den Arduino Uno R4 und andere Komponenten mit Strom zu versorgen.
Wie man einen Linearantrieb ausfährt und einfährt
Sie können die Richtung eines Linearantriebs steuern, indem Sie die Pins IN1 und IN2 entweder auf HIGH oder LOW setzen. Die folgende Tabelle zeigt, wie dies für beide Kanäle gemacht wird.
| IN1 pin | IN2 pin | Direction |
|---|---|---|
| LOW | LOW | Linear Actuator A stops |
| HIGH | HIGH | Linear Actuator A stops |
| HIGH | LOW | Linear Actuator A extends |
| LOW | HIGH | Linear Actuator A retracts |
- Verlängert Linearantrieb A
- Linearantrieb A zieht sich zurück.
※ Notiz:
Wenn die OUT1- und OUT2-Pins falsch an den Linearantrieb angeschlossen sind, dreht sich die Richtung um. Um dies zu beheben, wechseln Sie einfach die OUT1- und OUT2-Pins oder ändern Sie die Steuersignale an den IN1- und IN2-Pins im Programm.
Wie man verhindert, dass sich ein Linearantrieb ausfährt oder einfährt
Der Linearantrieb stoppt automatisch, sobald er seine maximale bzw. minimale Position erreicht hat, egal, ob er ausfährt oder einfährt. Wir können ihn auch so einstellen, dass er vor dem Erreichen dieser Punkte anhält.
Es gibt zwei Methoden, einen Linearantrieb zu stoppen.
- Stellt die Geschwindigkeit auf Null ein
- Setzt die Pins IN1 und IN2 auf denselben Pegel (LOW oder HIGH).
- Bitte überprüfen Sie die Grammatik und Zeichensetzung, bevor Sie dieses Dokument veröffentlichen.
Wie man die Geschwindigkeit eines Linearantriebs über den L298N-Treiber steuert
Um die Geschwindigkeit des Linearantriebs einfach anzupassen, verwenden Sie ein PWM-Signal am ENA-Pin, anstatt ihn auf HIGH zu setzen. So können Sie es tun:
- Schließe einen Pin des Arduino UNO R4 an den ENA-Pin des L298N-Moduls an.
- Verwende die Funktion analogWrite(), um ein PWM-Signal an den ENA-Pin zu senden. Der L298N-Treiber wird dieses Signal verstärken, um den Linearantrieb zu steuern.
Die Geschwindigkeit kann jede Zahl von 0 bis 255 sein. Bei einer Geschwindigkeit von 0 stoppt der Linearantrieb. Bei einer Geschwindigkeit von 255 bewegt er sich mit der höchsten Geschwindigkeit.
Arduino UNO R4 Beispielcode
Dieser Code führt die folgenden Aufgaben aus:
- Fahre den Stellantrieb so schnell wie möglich aus
- Stoppe den Stellantrieb
- Fahre den Stellantrieb so schnell wie möglich ein
- Stoppe den Stellantrieb
Schnelle Schritte
Befolgen Sie diese Anweisungen Schritt für Schritt:
- Wenn dies das erste Mal ist, dass Sie den Arduino Uno R4 WiFi/Minima verwenden, verweisen Sie auf das Tutorial zur Einrichtung der Umgebung für Arduino Uno R4 WiFi/Minima in der Arduino IDE.
- Verbinden Sie die Komponenten gemäß dem bereitgestellten Diagramm.
- Schließen Sie das Arduino Uno R4-Board über ein USB-Kabel an Ihren Computer an.
- Starten Sie die Arduino IDE auf Ihrem Computer.
- Wählen Sie das passende Arduino Uno R4-Board (z. B. Arduino Uno R4 WiFi) und den COM-Port aus.
- Entfernen Sie alle drei Jumper vom L298N-Modul.
- Fügen Sie den Code in die Arduino IDE ein.
- Drücken Sie die Schaltfläche Upload in der Arduino IDE, um den Code auf den Arduino UNO R4 zu übertragen.
- Beobachten Sie Folgendes:
- Der Linearantrieb fährt aus und stoppt, wenn er sein Limit erreicht.
- Der Linearantrieb hält seine Position für eine Zeitspanne.
- Der Linearantrieb fährt zurück und stoppt, wenn er sein Limit erreicht.
- Der Linearantrieb hält seine Position für eine Zeitspanne.
- Diese Sequenz wiederholt sich kontinuierlich.
Video Tutorial
Wir erwägen die Erstellung von Video-Tutorials. Wenn Sie Video-Tutorials für wichtig halten, abonnieren Sie bitte unseren YouTube-Kanal , um uns zu motivieren, die Videos zu erstellen.
Zusammenfassung
In diesem Arduino UNO R4-Tutorial hast du gelernt, wie man einen Linearantrieb mit einem L298N-Treiber für DIY-Automatisierung steuert. Diese einfache Anleitung zeigte dir, wie du den Linearantrieb aus- und einfährst, den L298N-Treiber anschließt und seine Geschwindigkeit mithilfe der Arduino-Programmierung änderst. Mit Fokus auf Linearantriebe ohne Rückmeldung hilft dir dieses einfache Arduino-Projekt, intelligente Automatisierungssysteme zu bauen. Jetzt kannst du diese Fähigkeiten nutzen, um deine eigenen Bewegungssteuerungsprojekte mit dem Arduino UNO R4 zu erstellen!