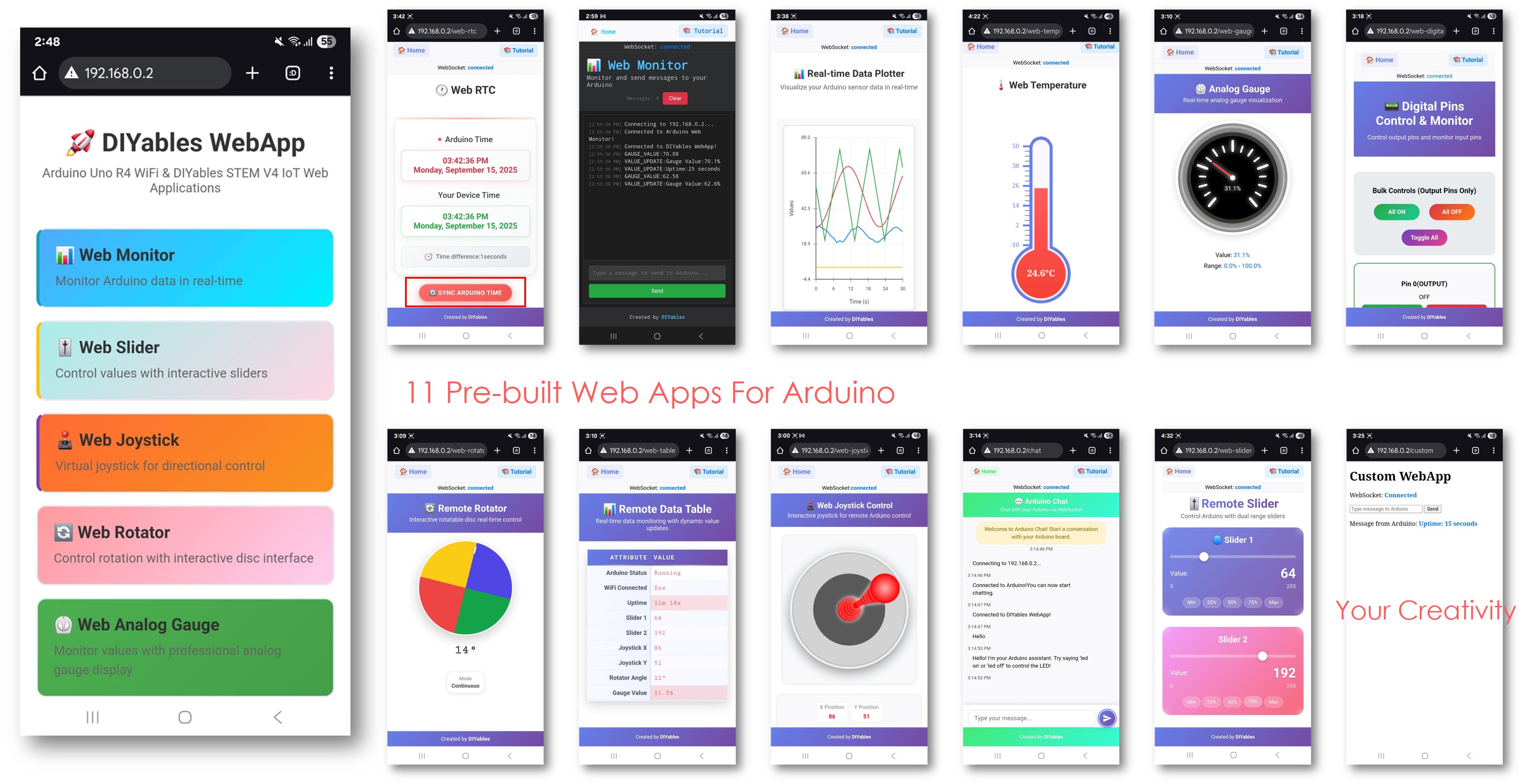
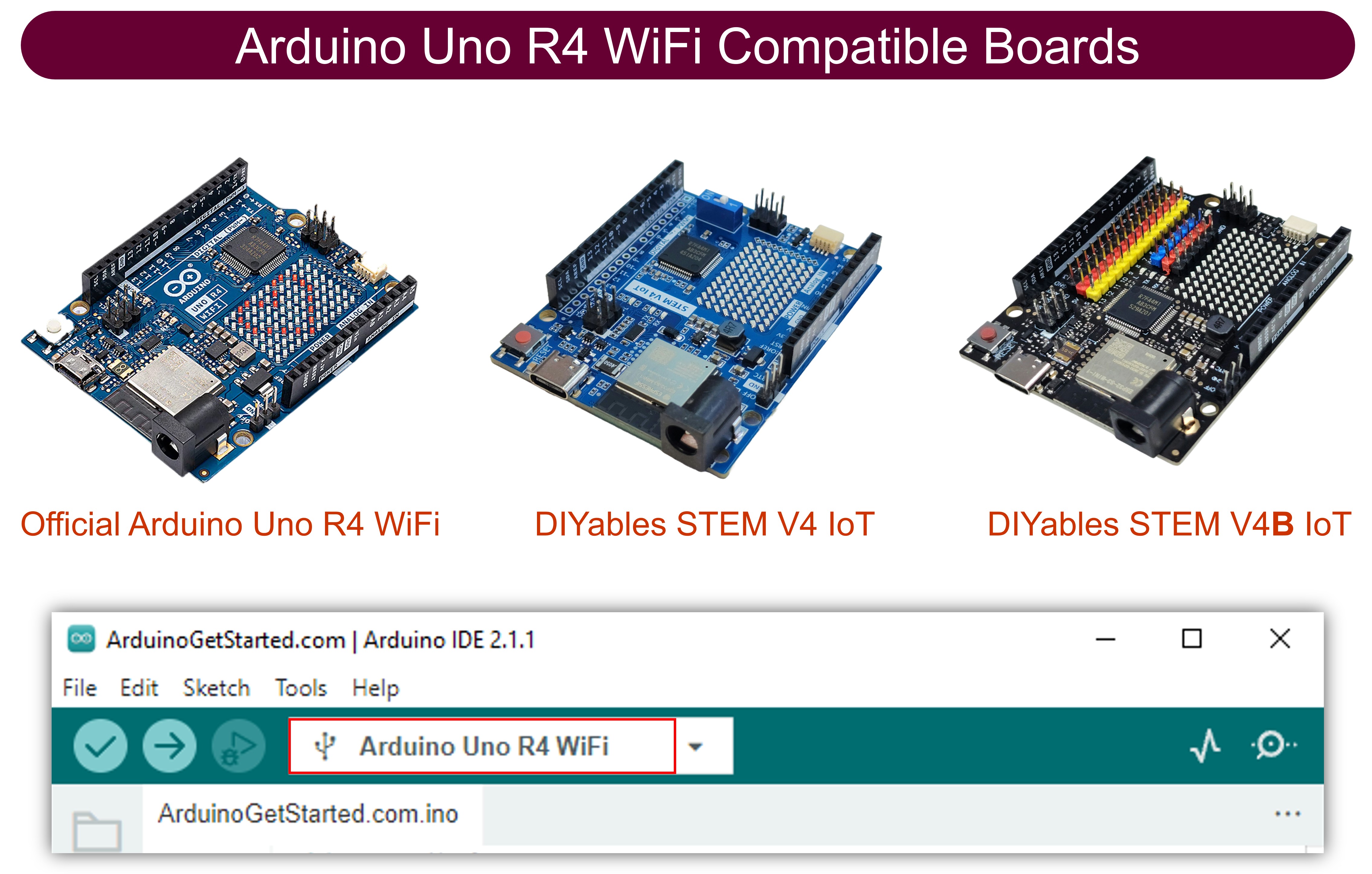
Dieses Beispiel zeigt, wie man mehrere Webanwendungen gleichzeitig mit der DIYables WebApps-Bibliothek verwendet. Es demonstriert die Integration mehrerer interaktiver Weboberflächen – wie Überwachung, Steuerung und Kommunikation – in einem einzigen Projekt. Dieses Beispiel ist für den Arduino Uno R4 WiFi und die DIYables STEM V4 IoT-Plattform konzipiert und eignet sich hervorragend, um zu lernen, wie man mehrere webbasierte Funktionen gleichzeitig kombiniert und verwaltet und bietet eine robuste Grundlage für fortgeschrittene IoT-Projekte.
Funktionen
Startseite: Zentrales Navigationszentrum mit Links zu allen Webanwendungen
Web Monitor: Echtzeit-Serienkommunikation und Debugging-Schnittstelle
Chat Interface: Interaktives Chatsystem mit Arduino-Antwortmöglichkeiten
Digital Pin Control: Webbasierte Steuerung und Überwachung aller digitalen Pins
Duale Schieberegler-Steuerung: Zwei unabhängige Schieberegler zur Steuerung analoger Werte
Virtueller Joystick: 2D-Positionssteuerung für Richtungsanwendungen
Vereinheitlichte Zustandsverwaltung: Alle Schnittstellen teilen sich synchronisierte Zustandsinformationen
Echtzeit-Updates: WebSocket-Kommunikation für sofortige Reaktionen
Vorlagenstruktur: Bereit zur individuellen Anpassung als Grundlage für komplexe Projekte
Plattform-Erweiterbarkeit: Derzeit implementiert für Arduino Uno R4 WiFi, kann aber auf andere Hardware-Plattformen erweitert werden. Siehe DIYables_WebApps_ESP32
Offenlegung: Einige der in diesem Abschnitt bereitgestellten Links sind Amazon-Affiliate-Links. Wir können eine Provision für Käufe erhalten, die über diese Links getätigt werden, ohne zusätzliche Kosten für Sie. Wir schätzen Ihre Unterstützung.
Schnelle Schritte
Folgen Sie diesen Anweisungen Schritt für Schritt:
Verbinden Sie das Arduino Uno R4/DIYables STEM V4 IoT-Board über ein USB-Kabel mit Ihrem Computer.
Starten Sie die Arduino IDE auf Ihrem Computer.
Wählen Sie das passende Arduino Uno R4-Board (z. B. Arduino Uno R4 WiFi) und den COM-Port.
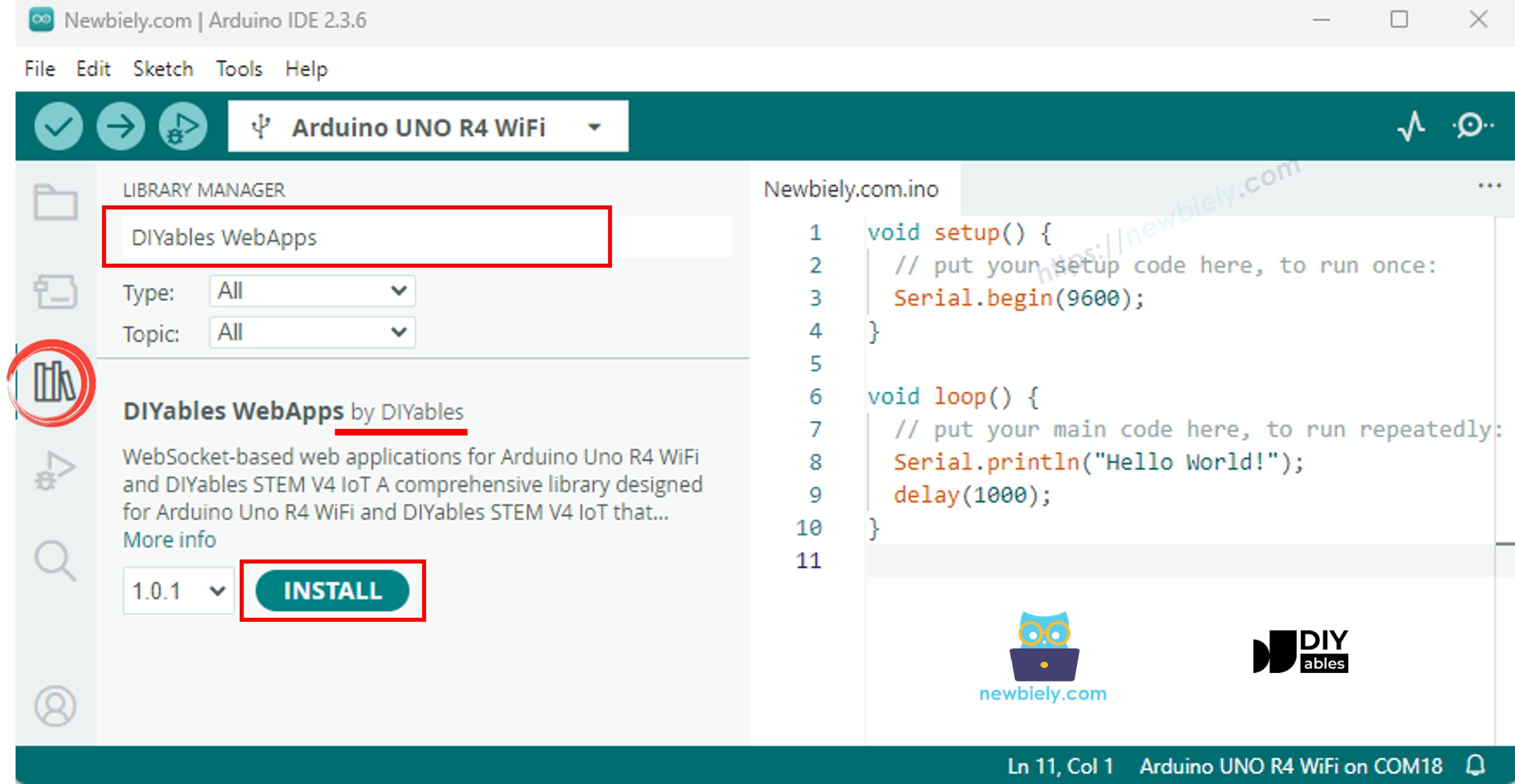
Gehen Sie zum Bibliotheken-Symbol in der linken Leiste der Arduino IDE.
Suchen Sie "DIYables WebApps", und finden Sie dann die DIYables WebApps-Bibliothek von DIYables.
Klicken Sie auf die Schaltfläche Installieren, um die Bibliothek zu installieren.
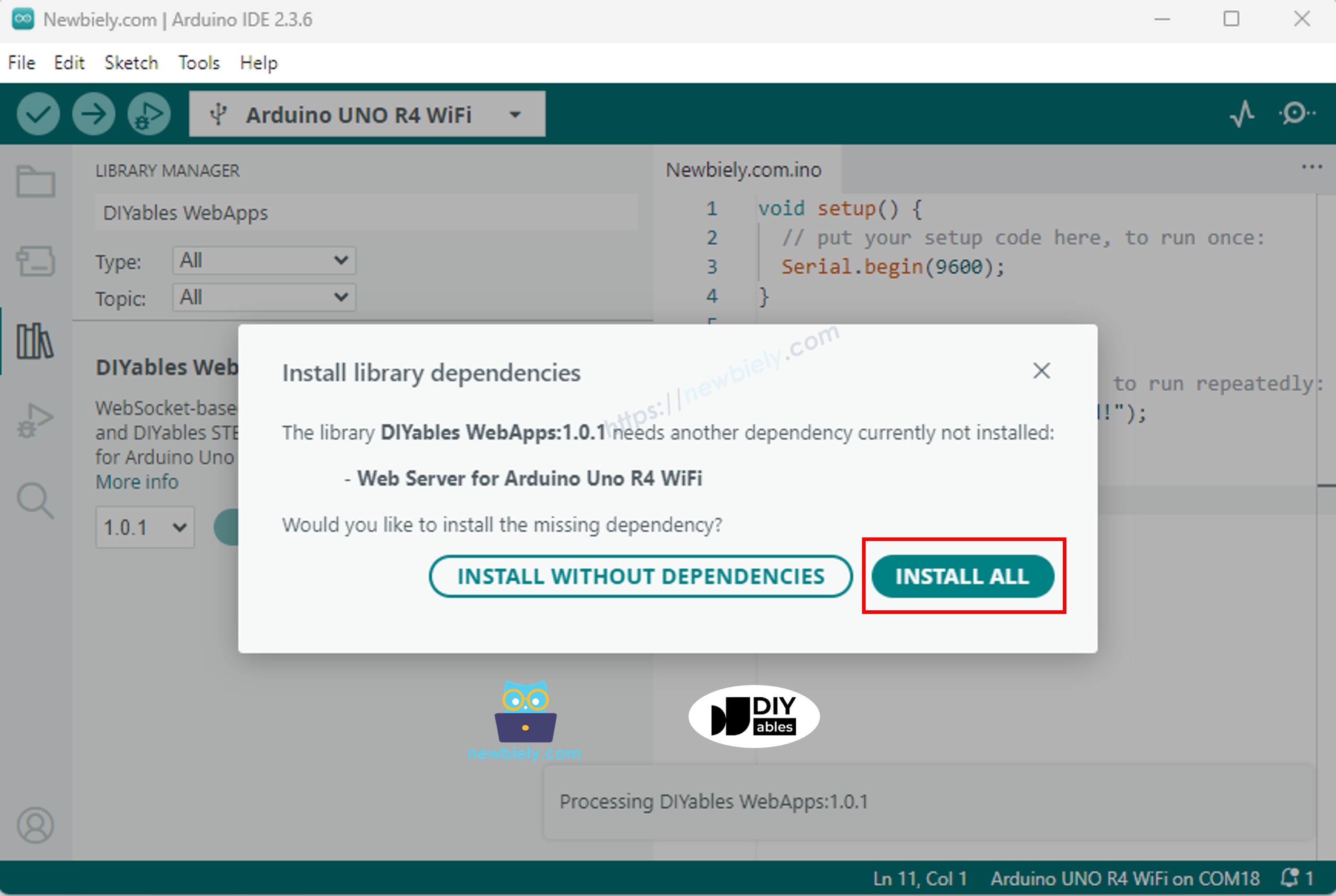
Sie werden aufgefordert, einige weitere Bibliotheksabhängigkeiten zu installieren
Klicken Sie auf die Schaltfläche Alle installieren, um alle Bibliotheksabhängigkeiten zu installieren.
In der Arduino IDE gehen Sie zu Datei Beispiele DIYables WebApps MultipleWebApps Beispiel, oder kopieren Sie den obigen Code und fügen ihn in den Editor der Arduino IDE ein
/* * DIYables WebApp Library - Multiple WebApps Example * * This example demonstrates multiple web apps of the DIYables WebApp library: * - Home page with links to multiple web apps * - Web Monitor: Real-time serial monitoring via WebSocket * - Web Slider: Dual slider control * - Web Joystick: Interactive joystick control * - Web Rotator: Interactive rotatable disc control * - Web Analog Gauge: Professional circular gauge for sensor monitoring * - Web Table: Two-column data table with real-time updates * - Web Plotter: See WebPlotter example for real-time data visualization * * Features: * - Simplified callback system - no manual command parsing needed * - Automatic state synchronization and JSON handling * - All protocol details handled by the library * - Template for hardware control * * Hardware: Arduino Uno R4 WiFi or DIYables STEM V4 IoT * * Setup: * 1. Update WiFi credentials below * 2. Upload the sketch to your Arduino * 3. Open Serial Monitor to see the IP address * 4. Navigate to the IP address in your web browser */#include <DIYablesWebApps.h>// WiFi credentials - UPDATE THESE WITH YOUR NETWORKconstchar WIFI_SSID[] = "YOUR_WIFI_SSID";constchar WIFI_PASSWORD[] = "YOUR_WIFI_PASSWORD";// Create WebApp server and page instancesUnoR4ServerFactory factory;DIYablesWebAppServerwebAppsServer(factory, 80, 81);DIYablesHomePage homePage;DIYablesWebMonitorPage webMonitorPage;DIYablesWebSliderPage webSliderPage;DIYablesWebJoystickPage webJoystickPage(false, 5); // autoReturn=false, sensitivity=5DIYablesWebRotatorPage webRotatorPage(ROTATOR_MODE_CONTINUOUS); // Continuous rotation mode (0-360°)DIYablesWebAnalogGaugePage webAnalogGaugePage(0.0, 100.0, "%"); // Range: 0-100%, units: %DIYablesWebTablePage webTablePage;// Variables to track statesint currentSlider1 = 64; // Slider 1 value (0-255)int currentSlider2 = 128; // Slider 2 value (0-255)int currentJoystickX = 0; // Current joystick X value (-100 to 100)int currentJoystickY = 0; // Current joystick Y value (-100 to 100)int currentRotatorAngle = 0; // Current rotator angle (0-360°)float currentGaugeValue = 50.0; // Current gauge value (0.0-100.0)voidsetup() {Serial.begin(9600);delay(1000);// TODO: Initialize your hardware pins hereSerial.println("DIYables WebApp - Multiple Apps Example");// Add all web applications to the serverwebAppsServer.addApp(&homePage);webAppsServer.addApp(&webMonitorPage);webAppsServer.addApp(&webSliderPage);webAppsServer.addApp(&webJoystickPage);webAppsServer.addApp(&webRotatorPage);webAppsServer.addApp(&webAnalogGaugePage);webAppsServer.addApp(&webTablePage);// Add more web apps here (e.g., WebPlotter)// Set 404 Not Found page (optional - for better user experience)webAppsServer.setNotFoundPage(DIYablesNotFoundPage());// Configure table structure (only attribute names, values will be updated dynamically) webTablePage.addRow("Arduino Status"); webTablePage.addRow("WiFi Connected"); webTablePage.addRow("Uptime"); webTablePage.addRow("Slider 1"); webTablePage.addRow("Slider 2"); webTablePage.addRow("Joystick X"); webTablePage.addRow("Joystick Y"); webTablePage.addRow("Rotator Angle"); webTablePage.addRow("Gauge Value");// Start the WebApp serverif (!webAppsServer.begin(WIFI_SSID, WIFI_PASSWORD)) {while (1) {Serial.println("Failed to start WebApp server!");delay(1000); } } setupCallbacks();}void setupCallbacks() {// Web Monitor callback - echo messages back webMonitorPage.onWebMonitorMessage([](const String& message) {Serial.println("Web Monitor: " + message); webMonitorPage.sendToWebMonitor("Arduino received: " + message); });// Web Slider callback - handle slider values webSliderPage.onSliderValueFromWeb([](int slider1, int slider2) {// Store the received values currentSlider1 = slider1; currentSlider2 = slider2;// Print slider values (0-255) without String concatenationSerial.print("Slider 1: ");Serial.print(slider1);Serial.print(", Slider 2: ");Serial.println(slider2);// Update table with new slider values using String() conversion webTablePage.sendValueUpdate("Slider 1", String(slider1)); webTablePage.sendValueUpdate("Slider 2", String(slider2));// TODO: Add your control logic here based on slider values// Examples:// - Control PWM: analogWrite(LED_PIN, slider1);// - Control servos: servo.write(map(slider1, 0, 255, 0, 180));// - Control motor speed: analogWrite(MOTOR_PIN, slider2);// Update gauge based on slider1 value (map 0-255 to 0-100) currentGaugeValue = map(slider1, 0, 255, 0, 100); webAnalogGaugePage.sendToWebAnalogGauge(currentGaugeValue);char gaugeStr[16]; snprintf(gaugeStr, sizeof(gaugeStr), "%.1f%%", currentGaugeValue); webTablePage.sendValueUpdate("Gauge Value", String(gaugeStr)); });// Handle slider value requests webSliderPage.onSliderValueToWeb([]() { webSliderPage.sendToWebSlider(currentSlider1, currentSlider2); });// Web Joystick callback - handle joystick movement webJoystickPage.onJoystickValueFromWeb([](int x, int y) {// Store the received values currentJoystickX = x; currentJoystickY = y;// Print joystick position values (-100 to +100)Serial.print("Joystick - X: ");Serial.print(x);Serial.print(", Y: ");Serial.println(y);Serial.print(x);Serial.print(", Y: ");Serial.println(y);// Update table with new joystick values webTablePage.sendValueUpdate("Joystick X", String(x)); webTablePage.sendValueUpdate("Joystick Y", String(y));// TODO: Add your control logic here based on joystick position// Examples:// - Control motors: if (x > 50) { /* move right */ }// - Control servos: servo.write(map(y, -100, 100, 0, 180));// - Control LEDs: analogWrite(LED_PIN, map(abs(x), 0, 100, 0, 255)); });// Handle joystick values requests (when web page loads/reconnects) webJoystickPage.onJoystickValueToWeb([]() { webJoystickPage.sendToWebJoystick(currentJoystickX, currentJoystickY); });// Web Rotator callback - handle rotation angle changes webRotatorPage.onRotatorAngleFromWeb([](float angle) {// Store the received angle currentRotatorAngle = (int)angle;// Print rotator angle (0-360°)Serial.println("Rotator angle: " + String(angle) + "°");// Update table with new rotator angle webTablePage.sendValueUpdate("Rotator Angle", String(angle, 0) + "°");// TODO: Add your control logic here based on rotator angle// Examples:// - Control servo: servo.write(map(angle, 0, 360, 0, 180));// - Control stepper motor: stepper.moveTo(angle);// - Control directional LED strip: setLEDDirection(angle); });// Handle analog gauge value requests (when web page loads/reconnects) webAnalogGaugePage.onGaugeValueRequest([]() { webAnalogGaugePage.sendToWebAnalogGauge(currentGaugeValue); });// Handle table data requests (when web page loads/reconnects) webTablePage.onTableValueRequest([]() {// Send initial values to the table webTablePage.sendValueUpdate("Arduino Status", "Running"); webTablePage.sendValueUpdate("WiFi Connected", "Yes"); webTablePage.sendValueUpdate("Uptime", "0 seconds"); webTablePage.sendValueUpdate("Slider 1", String(currentSlider1)); webTablePage.sendValueUpdate("Slider 2", String(currentSlider2)); webTablePage.sendValueUpdate("Joystick X", String(currentJoystickX)); webTablePage.sendValueUpdate("Joystick Y", String(currentJoystickY)); webTablePage.sendValueUpdate("Rotator Angle", String(currentRotatorAngle) + "°"); webTablePage.sendValueUpdate("Gauge Value", String(currentGaugeValue, 1) + "%"); });}voidloop() {// Handle WebApp server communicationswebAppsServer.loop();// Update table with current uptime every 5 secondsstaticunsignedlong lastUptimeUpdate = 0;if (millis() - lastUptimeUpdate > 5000) { lastUptimeUpdate = millis();unsignedlong uptimeSeconds = millis() / 1000;String uptimeStr = String(uptimeSeconds) + " seconds";if (uptimeSeconds >= 60) { uptimeStr = String(uptimeSeconds / 60) + "m " + String(uptimeSeconds % 60) + "s"; } webTablePage.sendValueUpdate("Uptime", uptimeStr); }// Simulate sensor data updates every 3 secondsstaticunsignedlong lastSensorUpdate = 0;if (millis() - lastSensorUpdate > 3000) { lastSensorUpdate = millis();// Simulate a sensor reading that varies over timefloat sensorValue = 50.0 + 30.0 * sin(millis() / 10000.0); // Oscillates between 20-80 currentGaugeValue = sensorValue;// Update gauge and table webAnalogGaugePage.sendToWebAnalogGauge(currentGaugeValue); webTablePage.sendValueUpdate("Gauge Value", String(currentGaugeValue, 1) + "%"); }// TODO: Add your main application code heredelay(10);}
Konfigurieren Sie die WLAN-Zugangsdaten im Code, indem Sie diese Zeilen aktualisieren:
Klicken Sie auf die Schaltfläche Hochladen im Arduino IDE, um Code auf den Arduino UNO R4/DIYables STEM V4 IoT hochzuladen
Öffnen Sie den Serial Monitor
Überprüfen Sie das Ergebnis im Serial Monitor. Es sieht so aus wie unten gezeigt
Newbiely | Arduino IDE 2.3.8
──
☐
✕
File
Edit
Sketch
Tools
Help
Arduino Uno R4 WiFi
Newbiely.ino
···
8Serial.println("Hello World!");
Output
Serial Monitor
Message (Enter to send message to 'Arduino Uno R4 WiFi' on 'COM15')
New Line
9600 baud
DIYables WebApp - Multiple Apps Example
INFO: Added app /
INFO: Added app /web-monitor
INFO: Added app /web-slider
INFO: Added app /web-joystick
INFO: Added app /web-rotator
INFO: Added app /web-gauge
INFO: Added app /web-table
DIYables WebApp Library
Platform: Arduino Uno R4 WiFi
Network connected!
IP address: 192.168.0.2
HTTP server started on port 80
Configuring WebSocket server callbacks...
WebSocket server started on port 81
WebSocket URL: ws://192.168.0.2:81
WebSocket server started on port 81
==========================================
DIYables WebApp Ready!
==========================================
📱 Web Interface: http://192.168.0.2
🔗 WebSocket: ws://192.168.0.2:81
📋 Available Applications:
🏠 Home Page: http://192.168.0.2/
📊 Web Monitor: http://192.168.0.2/web-monitor
🎚️ Web Slider: http://192.168.0.2/web-slider
🕹️ Web Joystick: http://192.168.0.2/web-joystick
🔄 Web Rotator: http://192.168.0.2/web-rotator
⏲️ Web Analog Gauge: http://192.168.0.2/web-gauge
📊 Web Table: http://192.168.0.2/web-table
==========================================
Ln 11, Col 1
Arduino Uno R4 WiFi on COM15
2
Wenn Sie nichts sehen, starten Sie das Arduino-Board neu.
Notieren Sie die angezeigte IP-Adresse und geben Sie diese Adresse in die Adressleiste eines Webbrowsers auf Ihrem Smartphone oder PC ein.
Beispiel: http://192.168.0.2
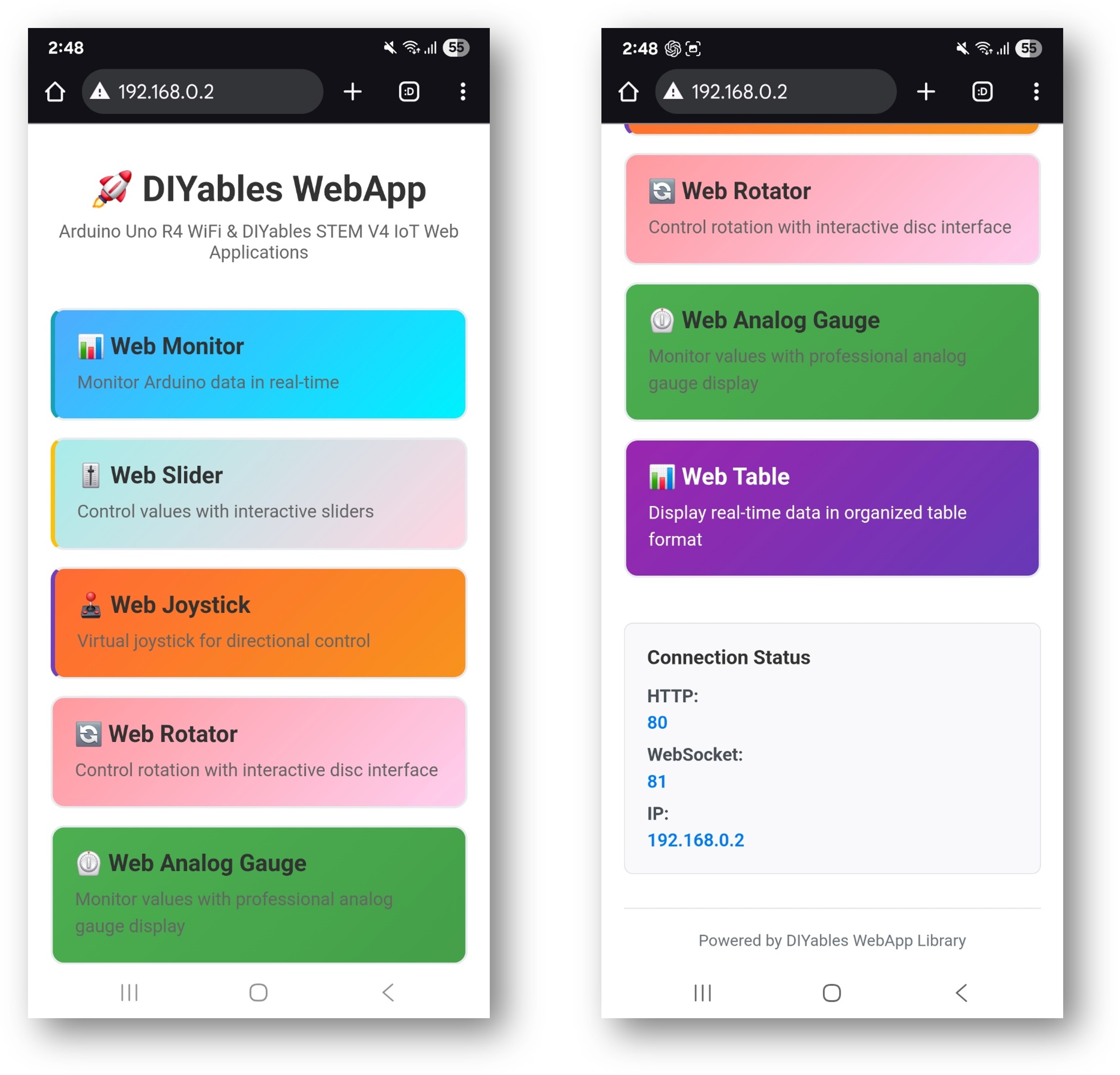
Sie sehen die Startseite mit allen Webanwendungen, wie im folgenden Bild.
Klicken Sie auf jeden Link einer Webanwendung (Chat, Web Monitor, Web Digital Pins, Web Slider, Web Joystick usw.). Sie sehen die Benutzeroberfläche der entsprechenden Webanwendung.
Oder Sie können auch direkt auf jede Seite zugreifen, indem Sie die IP-Adresse gefolgt vom App-Pfad verwenden. Zum Beispiel: http://192.168.0.2/chat, http://192.168.0.2/web-monitor usw.
Erkunden Sie alle Webanwendungen: Versuchen Sie, mit Arduino zu chatten, die serielle Ausgabe zu überwachen, digitale Pins zu steuern, Schieberegler anzupassen und den virtuellen Joystick zu verwenden, um die vollständigen Möglichkeiten der integrierten Weboberfläche zu erleben.
Navigation der Weboberfläche
Startseiten-Dashboard
Die Startseite dient als Ihr Kontrollzentrum mit Links zu allen Anwendungen:
http://[ARDUINO_IP]/ # Home pagehttp://[ARDUINO_IP]/webmonitor # Serialmonitor interfacehttp://[ARDUINO_IP]/chat # Chat interfacehttp://[ARDUINO_IP]/digital-pins # Pin controlhttp://[ARDUINO_IP]/webslider # Slider controlshttp://[ARDUINO_IP]/webjoystick # Joystick control
Kreative Anpassung – Entfessle deine Innovation
Dieses umfassende Beispiel bietet eine Grundlage für Ihre kreativen Projekte. Passen Sie die untenstehenden Konfigurationen an, um erstaunliche IoT-Anwendungen zu erstellen, die Ihrer einzigartigen Vision entsprechen.
Digitale Pin-Konfiguration
Das Beispiel vorkonfiguriert bestimmte Pins für verschiedene Zwecke:
Ausgangspins (über das Web steuerbar)
webDigitalPinsPage.enablePin(2, WEB_PIN_OUTPUT); // General purpose outputwebDigitalPinsPage.enablePin(3, WEB_PIN_OUTPUT); // General purpose outputwebDigitalPinsPage.enablePin(4, WEB_PIN_OUTPUT); // General purpose outputwebDigitalPinsPage.enablePin(13, WEB_PIN_OUTPUT); // Built-in LED
// Create joystick with custom settings// autoReturn=false: Joystick stays at last position when released// sensitivity=5: Only send updates when movement > 5%DIYablesWebJoystickPage webJoystickPage(false, 5);
Zustandsvariablen
Das Beispiel hält den synchronisierten Zustand über alle Schnittstellen hinweg aufrecht:
int pinStates[16] = { LOW }; // Track pin states (pins 0-13)int currentSlider1 = 64; // Slider 1 value (0-255) - 25%int currentSlider2 = 128; // Slider 2 value (0-255) - 50%int currentJoystickX = 0; // Joystick X value (-100 to 100)int currentJoystickY = 0; // Joystick Y value (-100 to 100)
Integrierte Chatbefehle
Die Chat-Oberfläche enthält mehrere vorprogrammierte Befehle:
Grundlegende Befehle
hello - freundliche Begrüßungsantwort
time - zeigt die Arduino-Betriebszeit in Sekunden an
status - gibt den Arduino-Status und den LED-Zustand aus
help - listet verfügbare Befehle auf
Steuerbefehle
LED einschalten - Schaltet die eingebaute LED ein
LED ausschalten - Schaltet die eingebaute LED aus
Beispiel-Chat-Sitzung
User: helloArduino: Hello! I'm your Arduino. How can I help you?User: led onArduino: Built-in LED is now ON!User: timeArduino: I've been runningfor 1245 seconds.User: statusArduino: Status: Running smoothly! LED is ON
// Science experiment control systemconstint HEATING_ELEMENT = 9;constint COOLING_FAN = 10;constint STIRRER_MOTOR = 11;constint TEMP_SENSOR_PIN = A0;constint PH_SENSOR_PIN = A1;void setupScienceExperiment() {// Sliders for temperature and stirring control webSliderPage.onSliderValueFromWeb([](int slider1, int slider2) {// Slider 1 controls target temperature (mapped to heating/cooling)int targetTemp = map(slider1, 0, 255, 20, 80); // 20-80°C range// Slider 2 controls stirrer speedanalogWrite(STIRRER_MOTOR, slider2);// Simple temperature control logicint currentTemp = readTemperature();if (currentTemp < targetTemp) {analogWrite(HEATING_ELEMENT, 200); // Heat onanalogWrite(COOLING_FAN, 0); // Fan off } elseif (currentTemp > targetTemp + 2) {analogWrite(HEATING_ELEMENT, 0); // Heat offanalogWrite(COOLING_FAN, 255); // Fan on } else {analogWrite(HEATING_ELEMENT, 0); // Both off (maintain)analogWrite(COOLING_FAN, 0); }Serial.println("Target: " + String(targetTemp) + "°C, Current: " + String(currentTemp) + "°C"); });// Chat interface for experiment control and data chatPage.onChatMessage([](constString& message) {String msg = message; msg.toLowerCase();if (msg.indexOf("data") >= 0) {int temp = readTemperature();float ph = readPH();String data = "Temperature: " + String(temp) + "°C, pH: " + String(ph, 2); chatPage.sendToChat(data);return; }if (msg.indexOf("start") >= 0) {// Begin experiment sequence chatPage.sendToChat("🔬 Experiment started! Monitoring conditions...");return; }if (msg.indexOf("stop") >= 0) {// Emergency stopanalogWrite(HEATING_ELEMENT, 0);analogWrite(COOLING_FAN, 0);analogWrite(STIRRER_MOTOR, 0); chatPage.sendToChat("⚠️ Experiment stopped - all systems OFF");return; } chatPage.sendToChat("Science commands: data, start, stop"); });// Monitor for automatic data logging webMonitorPage.onWebMonitorMessage([](const String& message) {if (message == "log") {int temp = readTemperature();float ph = readPH();String logEntry = String(millis()) + "," + String(temp) + "," + String(ph, 2); webMonitorPage.sendToWebMonitor(logEntry); } });}intreadTemperature() {// Read temperature sensor (example implementation)int sensorValue = analogRead(TEMP_SENSOR_PIN);returnmap(sensorValue, 0, 1023, 0, 100); // Convert to temperature}float readPH() {// Read pH sensor (example implementation)int sensorValue = analogRead(PH_SENSOR_PIN);returnmap(sensorValue, 0, 1023, 0, 14) / 10.0; // Convert to pH}
Fortgeschrittene Integrationstechniken
Zustandsynchronisierung
void synchronizeAllStates() {// Ensure all interfaces show current state webSliderPage.sendToWebSlider(currentSlider1, currentSlider2); webJoystickPage.sendToWebJoystick(currentJoystickX, currentJoystickY);// Update all pin statesfor (int pin = 0; pin <= 13; pin++) {if (webDigitalPinsPage.isPinEnabled(pin)) { webDigitalPinsPage.updatePinState(pin, pinStates[pin]); } }Serial.println("All interface states synchronized");}
Schnittstellenübergreifende Kommunikation
void setupCrossInterfaceCommunication() {// Joystick position affects slider maximum values webJoystickPage.onJoystickValueFromWeb([](int x, int y) {// Calculate distance from centerfloat distance = sqrt(x*x + y*y);// Limit slider maximum based on joystick distanceif (distance > 50) {// Reduce maximum slider values when joystick is far from centerint maxValue = map(distance, 50, 100, 255, 128);// You could implement dynamic slider limiting here } });// Pin states affect available chat commands webDigitalPinsPage.onPinWrite([](int pin, int state) {if (pin == 2 && state == HIGH) { chatPage.sendToChat("📢 System armed - additional commands available"); } elseif (pin == 2 && state == LOW) { chatPage.sendToChat("📢 System disarmed - limited commands only"); } });}
Fehlersuche
Häufige Probleme
1. Einige Schnittstellen laden nicht
Überprüfen Sie, dass alle Anwendungen während des Setups auf dem Server hinzugefügt wurden.
Überprüfen Sie WebSocket-Verbindungen in der Browser-Konsole.
Stellen Sie sicher, dass ausreichend Speicher für alle Schnittstellen vorhanden ist.
Inkonsistenzen zwischen Schnittstellen angeben
Implementieren Sie Rückruffunktionen zur Zustands-Synchronisierung
Verwenden Sie gemeinsam genutzte globale Variablen zur Verfolgung des Zustands
Rufen Sie Synchronisationsfunktionen nach wesentlichen Änderungen des Zustands auf
3. Leistungsprobleme mit mehreren Schnittstellen
Reduzieren Sie die Aktualisierungsrate für nicht kritische Schnittstellen
Implementieren Sie selektive Aktualisierungen basierend auf der aktiven Schnittstelle
Erwägen Sie, nicht verwendete Schnittstellen für bestimmte Projekte zu deaktivieren
Speicherbeschränkungen
Überwache den verfügbaren RAM mit Serial.print(freeMemory())
Deaktiviere ungenutzte Schnittstellen, wenn der Speicher knapp ist
Optimiere Callback-Funktionen, um den Speicherverbrauch zu minimieren
Schieberegler zur Steuerung von Geschwindigkeit und Temperatur
Joystick für Positioniersysteme
Chat für Statusmeldungen und Befehle
Monitor zur Datenerfassung
Vorlage für ein Lehrlabor
Schieberegler für Versuchsparameter
Digitale Pins zur Steuerung von Geräten
Chat zur Interaktion mit Studierenden
Monitor zur Datenerfassung
Sensorüberwachung in Echtzeit
Vorlage für Heimautomatisierung
Digitale Pins zur Beleuchtungs- und Gerätesteuerung
Schieberegler zum Dimmen und zur Klimasteuerung
Sicherheitsüberwachung über Eingangspins
Chat für sprachähnliche Befehle
Monitor zur Protokollierung des Systemstatus
Robotik-Entwicklungs-Vorlage
Joystick zur Bewegungssteuerung
Schieberegler für Geschwindigkeit und Servopositionierung
Digitale Pins für Sensoreneingänge
Chat-Schnittstelle für Befehlsoberfläche
Monitor zur Fehlerdiagnose und Telemetrie
Leistungsoptimierung
Speicherverwaltung
void optimizeMemoryUsage() {// Disable unused interfaces to save memory// server.addApp(&homePage); // Always keep home page// server.addApp(&webMonitorPage); // Keep for debugging// server.addApp(&chatPage); // Optional// server.addApp(&webDigitalPinsPage); // Based on project needs// server.addApp(&webSliderPage); // Based on project needs// server.addApp(&webJoystickPage); // Based on project needs}
Steuerung der Aktualisierungsfrequenz
void controlUpdateFrequency() {staticunsignedlong lastSlowUpdate = 0;staticunsignedlong lastFastUpdate = 0;// Fast updates for critical controls (10ms)if (millis() - lastFastUpdate > 10) {// Update joystick and emergency controls lastFastUpdate = millis(); }// Slow updates for monitoring (1000ms)if (millis() - lastSlowUpdate > 1000) {// Update sensor readings and status lastSlowUpdate = millis(); }}
Nächste Schritte
Nachdem Sie das MultipleWebApps-Beispiel gemeistert haben:
Passen Sie Ihr Projekt an: Entfernen Sie ungenutzte Schnittstellen und fügen Sie projektbezogene Logik hinzu
Sensoren hinzufügen: Integrieren Sie reale Sensorwerte zur Überwachung der Eingaben
Sicherheit implementieren: Fügen Sie Not-Aus-Schalter und Sicherheitsverriegelungen hinzu
Eigene Befehle erstellen: Erweitern Sie die Chat-Oberfläche mit projektspezifischen Befehlen
Datenprotokollierung hinzufügen: Verwenden Sie den Web-Monitor für dauerhafte Datenspeicherung
Mobile Optimierung: Testen und optimieren Sie die Nutzung mobiler Geräte
Unterstützung
Für weitere Hilfe:
Überprüfen Sie die Dokumentation der einzelnen Beispiele (Chat_Example.txt, WebMonitor_Example.txt, usw.)
Überprüfen Sie die API-Referenzdokumentation
Besuchen Sie DIYables-Tutorials: https://newbiely.com/tutorials/arduino-uno-r4/arduino-uno-r4-diyables-webapps
Arduino-Community-Foren
Dieses umfassende Beispiel bildet die Grundlage für nahezu jedes Arduino-Projekt, das über das Web gesteuert wird. Beginnen Sie mit dieser Vorlage und passen Sie sie an Ihre spezifischen Bedürfnisse an!
Sie können gerne den Link zu diesem Tutorial teilen. Bitte verwenden Sie jedoch unsere Inhalte nicht auf anderen Websites. Wir haben viel Mühe und Zeit in die Erstellung der Inhalte investiert, bitte respektieren Sie unsere Arbeit!