Arduino UNO R4 - Potentiometer-Servomotor
Diese Anleitung zeigt Ihnen, wie Sie einen Servomotor mit einem Potentiometer unter Verwendung des Arduino Uno R4 steuern. Diese Anleitung demonstriert, wie der Winkel des Servomotors durch Drehen eines Potentiometers eingestellt wird. Sie lernen:
- Wie man Potentiometer und Servomotor mit dem Arduino Uno R4 verbindet.
- Wie man den Arduino Uno R4 programmiert, einen Wert vom Potentiometer auszulesen, ihn in einen Winkelwert umzuwandeln und anschließend den Servomotor entsprechend zu steuern.
Erforderliche Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables STEM V4 IoT Starter-Kit (Arduino enthalten) | |
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Kaufhinweis: Falls Sie mehrere Servomotoren verwenden möchten, empfehlen wir die Verwendung des PCA9685 16 Channel PWM Servo Driver Module, um MCU-Pins zu sparen und die Verdrahtung zu vereinfachen.
Über Servomotor und Potentiometer
Bevor Sie fortfahren, falls Sie nicht mit Servomotoren und Potentiometern (deren Pinbelegung, Funktionsweise und Programmierung) vertraut sind, lesen Sie bitte die untenstehenden Tutorials.
Verdrahtungsdiagramm
- Der Schaltplan zwischen Arduino UNO R4, Servomotor und klassischem Potentiometer.
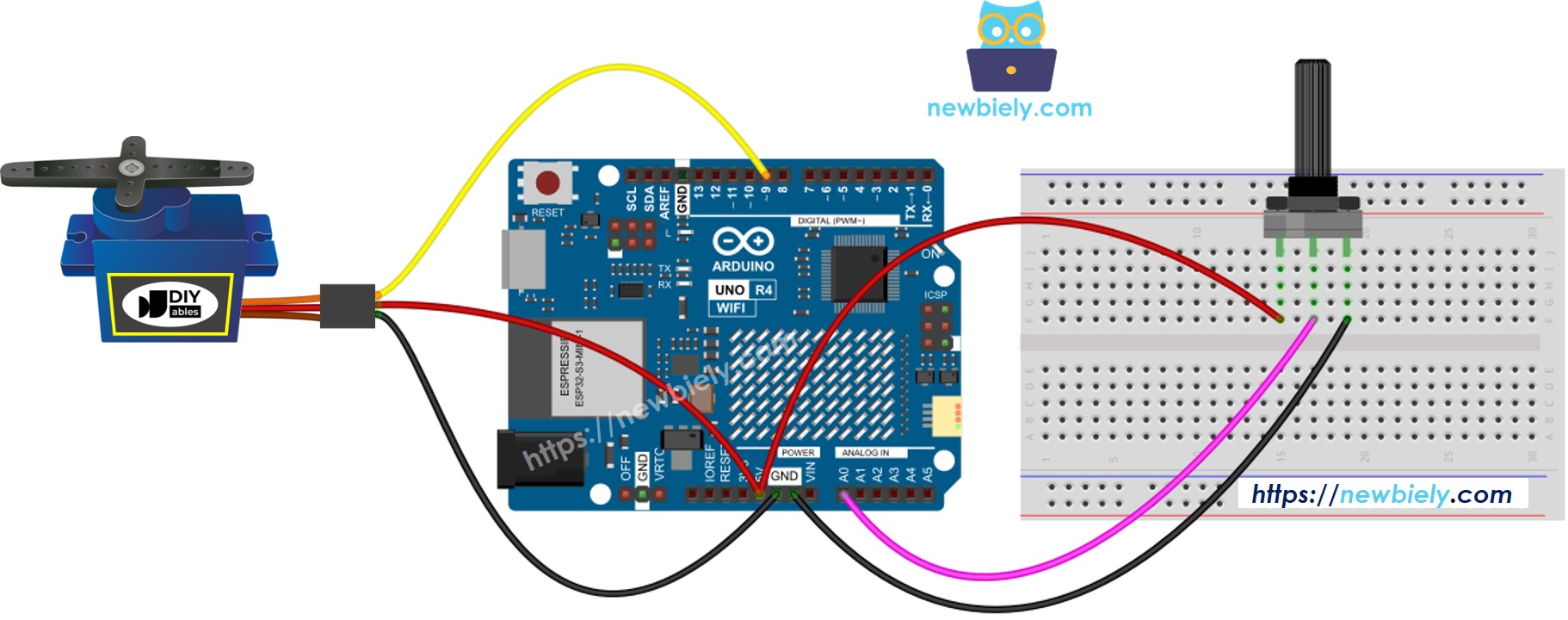
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
- Der Schaltplan zwischen dem Arduino UNO R4, dem Servomotor und dem Potentiometermodul.
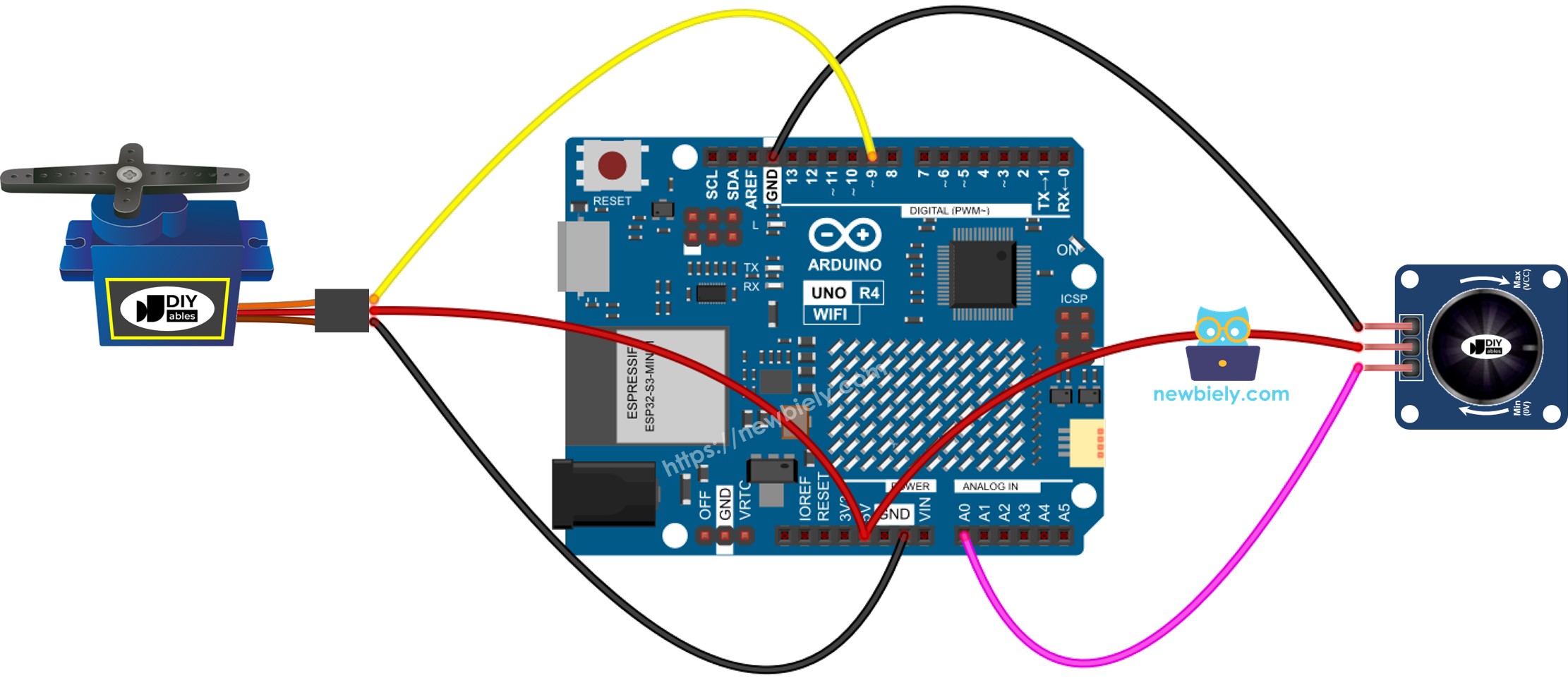
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
Siehe Der beste Weg, den Arduino Uno R4 und andere Komponenten mit Strom zu versorgen.
Wie man programmiert
- Liest den Wert des Potentiometers (Wertebereich von 0 bis 1023)
- Passt es auf einen Winkel an (Wert zwischen 0 und 180)
- Ändert die Position des Servomotors basierend auf dem Winkel.
Arduino UNO R4-Programmcode
Schnelle Schritte
Folgen Sie diesen Anweisungen Schritt für Schritt:
- Wenn dies Ihre erste Nutzung des Arduino Uno R4 WiFi/Minima ist, lesen Sie das Tutorial zur Einrichtung der Umgebung für Arduino Uno R4 WiFi/Minima in der Arduino IDE.
- Verdrahten Sie die Bauteile gemäß dem bereitgestellten Diagramm.
- Schließen Sie das Arduino UNO R4-Board über ein USB-Kabel an Ihren Computer an.
- Öffnen Sie die Arduino IDE auf Ihrem Computer.
- Wählen Sie das geeignete Arduino UNO R4-Board (z. B. Arduino Uno R4 WiFi) und den COM-Port aus.
- Kopieren Sie den obigen Code in die Arduino IDE und fügen Sie ihn dort ein.
- Klicken Sie in der Arduino IDE auf die Upload-Schaltfläche, um den Code auf das Arduino UNO R4 zu übertragen.

- Öffne den seriellen Monitor
- Drehe das Potentiometer
- Sieh zu, wie sich der Servomotor dreht
- Überprüfe das Ergebnis im seriellen Monitor
Code-Erklärung
Überprüfe die Erklärungen in den Kommentaren des Quellcodes – Zeile für Zeile!
Video Tutorial
Wir erwägen die Erstellung von Video-Tutorials. Wenn Sie Video-Tutorials für wichtig halten, abonnieren Sie bitte unseren YouTube-Kanal , um uns zu motivieren, die Videos zu erstellen.