Arduino UNO R4 - Bewegungsensor - Servomotor
Willkommen! Dieses Tutorial führt Sie durch die Verwendung eines Arduino UNO R4 mit einem Bewegungsmelder und einem Servomotor. Es ist klar und einfach und ideal für Anfänger. Der Bewegungsmelder erkennt Bewegungen, und der Servomotor rotiert zu einem bestimmten Winkel. Sie können dies verwenden, um Dinge wie ein Tor, eine Kamera oder einen kleinen Roboterarm zu steuern. Am Ende lernen Sie, wie Sie Folgendes tun:
- Drehe den Servomotor auf 90°, wenn der Bewegungsmelder eine Bewegung erkennt.
- Setze den Servomotor auf 0° zurück, wenn keine Bewegung vorhanden ist.
Du wirst verstehen, wie man den Arduino UNO R4 programmiert, um den Bewegungssensor auszulesen und den Servomotor zu steuern. Schließe den Servomotor an ein Gerät an, und der Bewegungssensor kümmert sich darum. Dieses Projekt ist perfekt für jeden, der mit Arduino anfängt und lustige, interaktive Projekte erstellen möchte. Lass uns beginnen!
Erforderliche Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables STEM V4 IoT Starter-Kit (Arduino enthalten) | |
| 1 | × | DIYables Sensor-Kit (30 Sensoren/Displays) | |
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Kaufhinweis: Falls Sie mehrere Servomotoren verwenden möchten, empfehlen wir die Verwendung des PCA9685 16 Channel PWM Servo Driver Module, um MCU-Pins zu sparen und die Verdrahtung zu vereinfachen.
Über Servomotor und Bewegungssensor
Wenn Sie mit Servomotoren und Bewegungssensoren (deren Pin-Verbindungen, Funktionen und Programmiermethoden) nicht vertraut sind, beachten Sie bitte die untenstehenden Tutorials:
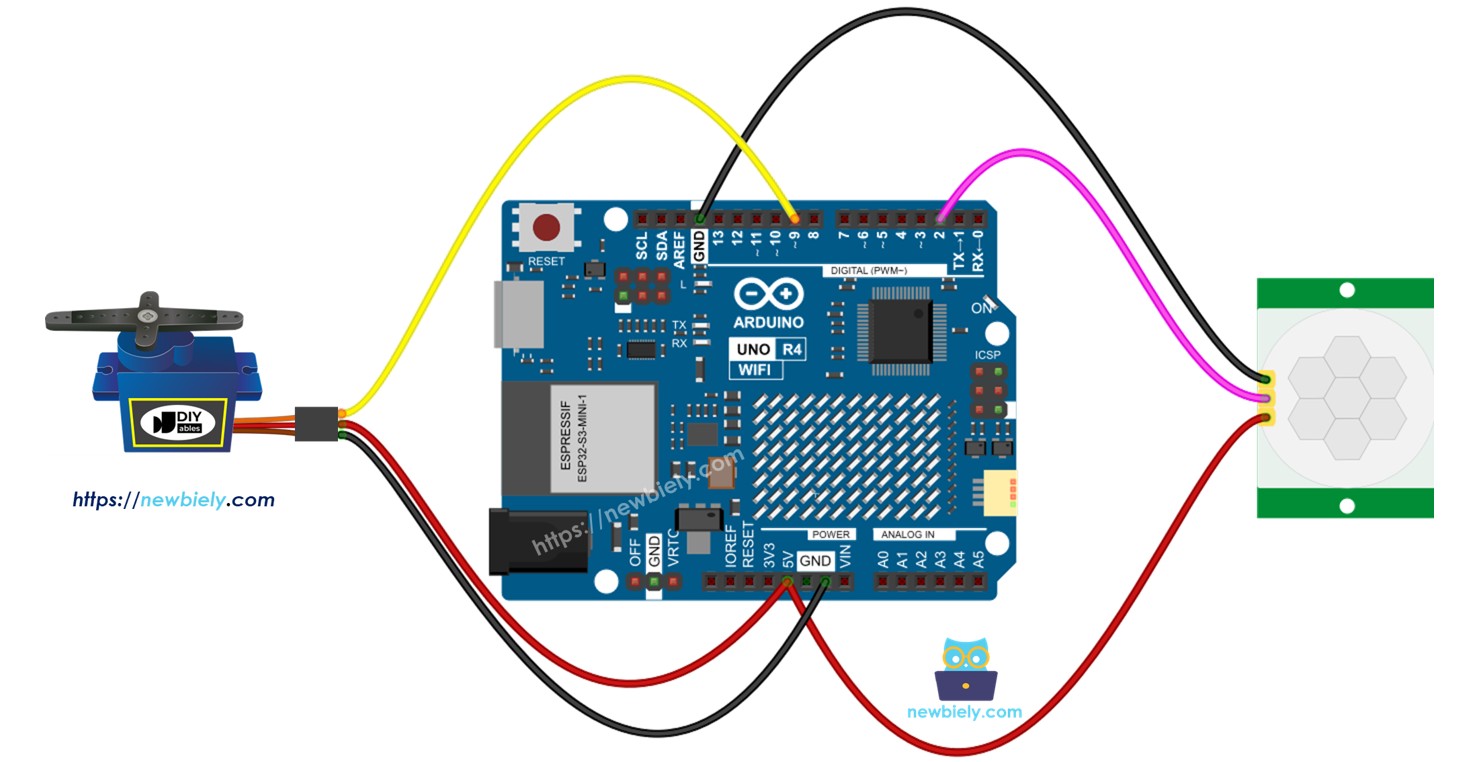
Verdrahtungsdiagramm
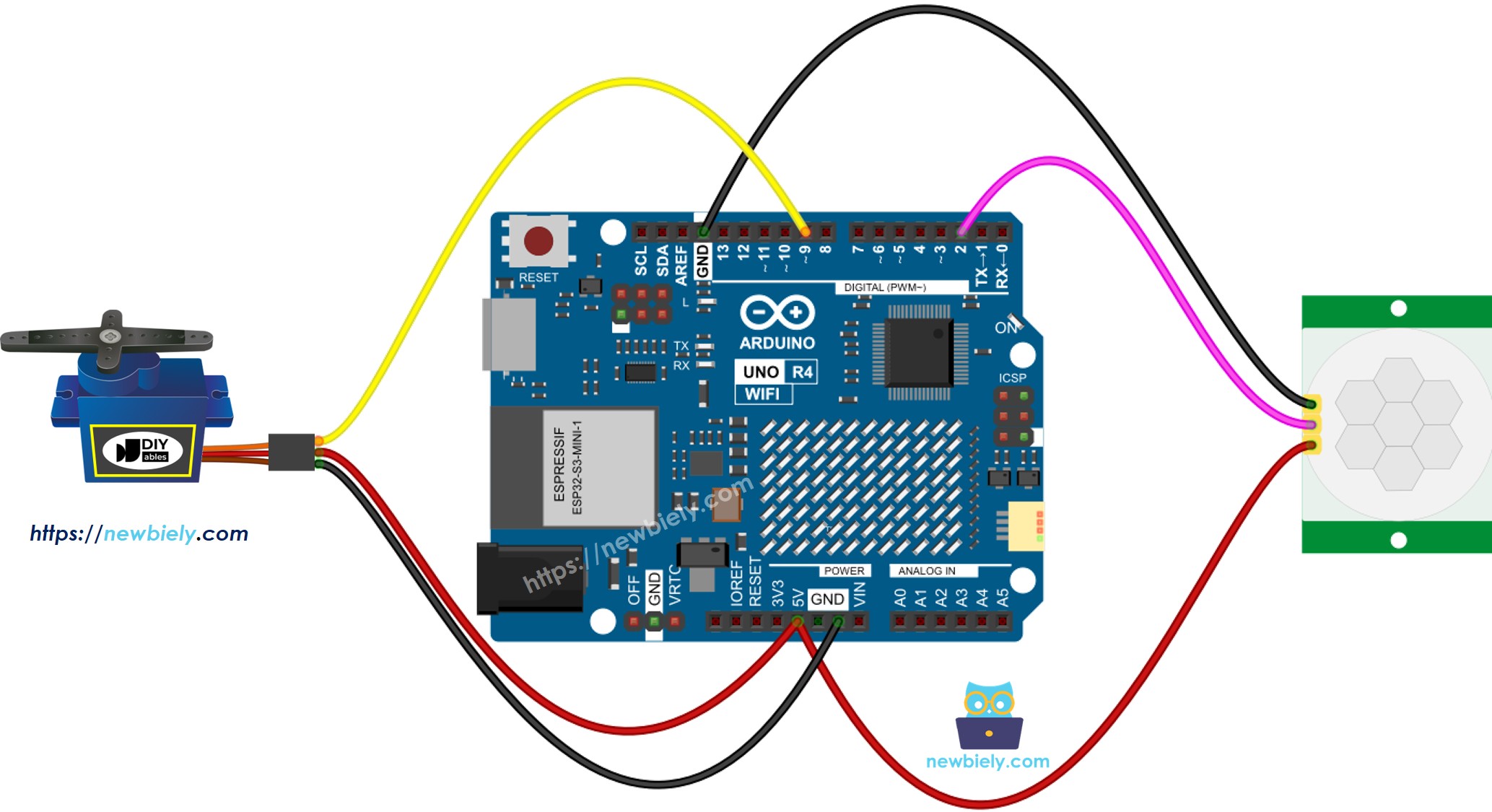
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
Siehe Der beste Weg, den Arduino Uno R4 und andere Komponenten mit Strom zu versorgen.
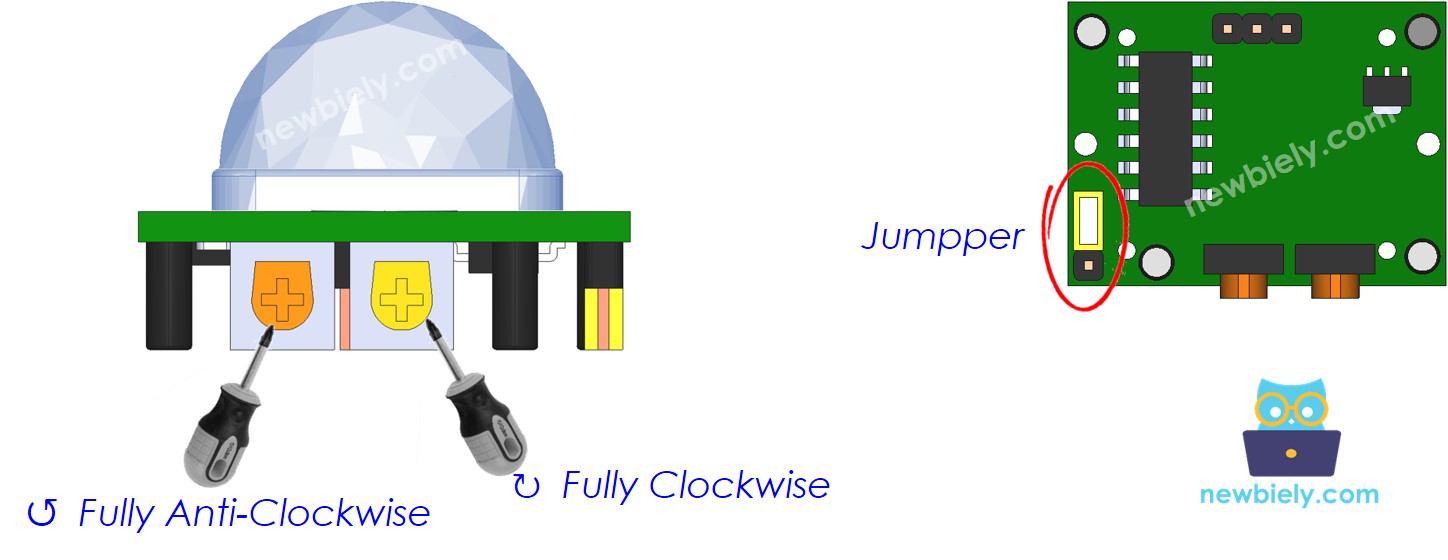
Ersteinrichtung
| Time Delay Adjuster | Screw it in anti-clockwise direction fully. |
| Detection Range Adjuster | Screw it in clockwise direction fully. |
| Repeat Trigger Selector | Put jumper as shown on the image. |
Arduino UNO R4 Code - Bewegungsensor steuert Servomotor
Schnelle Schritte
Folgen Sie diesen Anweisungen Schritt für Schritt:
- Falls dies das erste Mal ist, dass Sie den Arduino Uno R4 WiFi/Minima verwenden, lesen Sie das Tutorial zur Einrichtung der Umgebung für Arduino Uno R4 WiFi/Minima in der Arduino IDE Einrichtung der Umgebung für Arduino Uno R4 WiFi/Minima in der Arduino IDE.
- Verbinden Sie die Bauteile gemäß dem bereitgestellten Diagramm.
- Schließen Sie das Arduino Uno R4-Board mit einem USB-Kabel an Ihren Computer an.
- Starten Sie die Arduino IDE auf Ihrem Computer.
- Wählen Sie das passende Arduino Uno R4-Board aus (z. B. Arduino Uno R4 WiFi) und den COM-Port.
- Schließen Sie das Arduino UNO R4 mit dem USB-Kabel an Ihren Computer an.
- Starten Sie die Arduino IDE, wählen Sie das richtige Board und den Port aus.
- Fügen Sie den bereitgestellten Code in die Arduino IDE ein.
- Drücken Sie in der Arduino IDE die Upload-Schaltfläche, um den Code auf das Arduino UNO R4 zu übertragen.
- Winken Sie mit der Hand vor dem Sensor.
- Beobachten Sie, wie sich der Servomotor als Reaktion bewegt.
Video Tutorial
Wir erwägen die Erstellung von Video-Tutorials. Wenn Sie Video-Tutorials für wichtig halten, abonnieren Sie bitte unseren YouTube-Kanal , um uns zu motivieren, die Videos zu erstellen.