Arduino UNO R4 - Joystick - Servomotor
In diesem Leitfaden lernen wir, wie man einen Arduino UNO R4 und einen Joystick verwendet, um zwei Servomotoren oder ein Schwenk-Neige-Kit zu steuern.
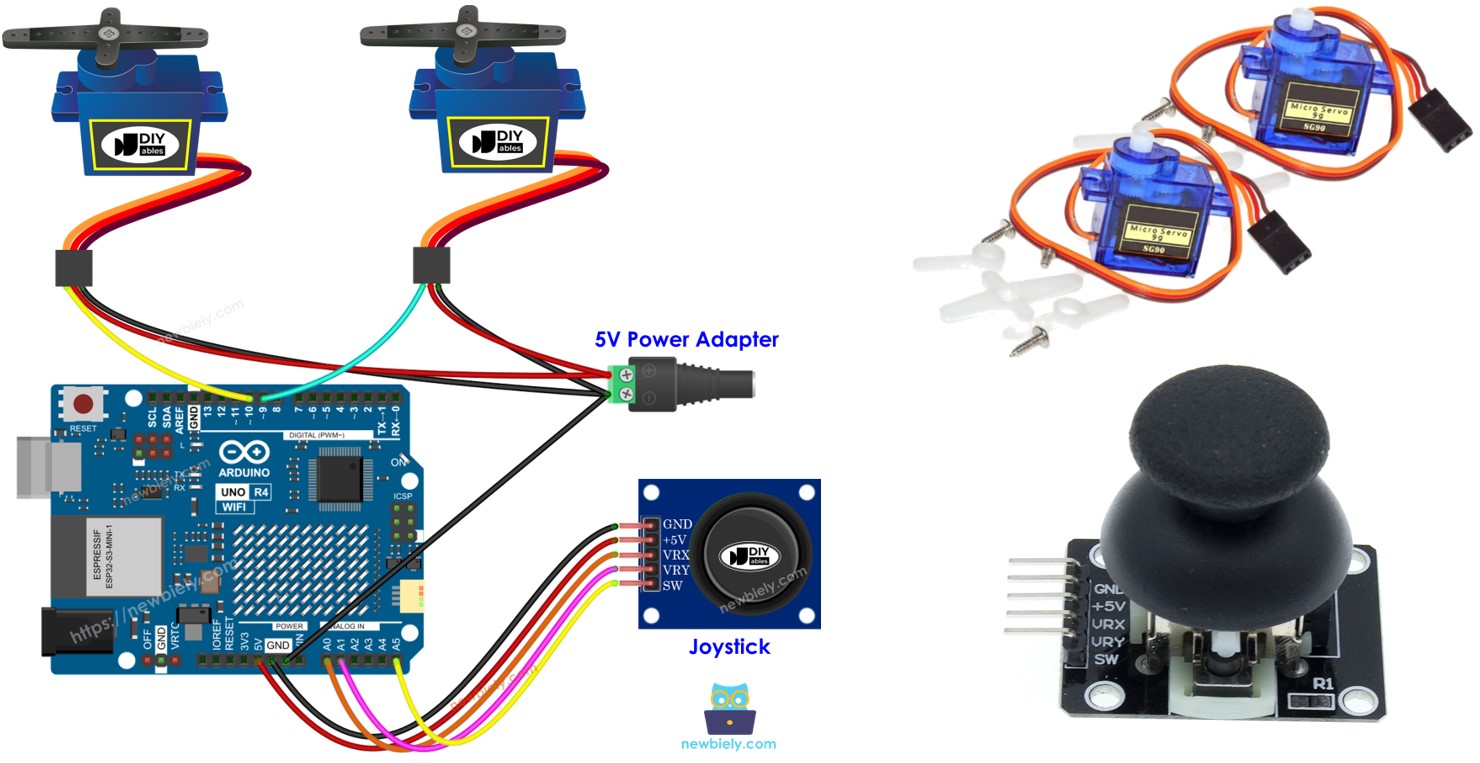
Ein Joystick besitzt zwei Potentiometer, die rechtwinklig zueinander angeordnet sind und als X-Achse bzw. Y-Achse bezeichnet werden. Diese Potentiometer erzeugen Signale, die X-Wert und Y-Wert genannt werden und von den VRX- und VRY-Pins des Joysticks ausgegeben werden. Wir verwenden diese Signale, um zwei Servomotoren zu steuern: Der X-Wert bewegt Servomotor Nr. 1 und der Y-Wert bewegt Servomotor Nr. 2. Wenn Sie diese zusammen mit einem Pan-Tilt-Kit verwenden, arbeiten die beiden Servomotoren zusammen, um sich in drei Dimensionen zu bewegen.
Es gibt zwei Beispiele dafür, wie die Anwendung verwendet werden kann:
- Anwendungsfall 1: Die Servomotoren drehen sich basierend darauf, wie der Joystick bewegt wird:
- Die Bewegungswinkel der Servomotoren stimmen mit den horizontalen (X) und vertikalen (Y) Bewegungen des Joysticks überein.
- Das Loslassen des Joysticks bewirkt, dass sich der Joystick und die Servomotoren in ihre Ausgangsposition zurückbewegen.
- Anwendungsfall 2: Die Servomotoren mit dem Joystick in verschiedene Richtungen steuern:
- Den Joystick nach links drücken, dreht Servomotor Nr. 1 im Uhrzeigersinn.
- Den Joystick nach rechts drücken, dreht Servomotor Nr. 1 gegen den Uhrzeigersinn.
- Den Joystick nach oben drücken, dreht Servomotor Nr. 2 im Uhrzeigersinn.
- Den Joystick nach unten drücken, dreht Servomotor Nr. 2 gegen den Uhrzeigersinn.
- Das Loslassen des Joysticks setzt die Servomotoren nicht zurück.
- Durch das Drücken des Joystickknopfs werden die Servomotoren in die Mitte zurückgesetzt.
- Wenn dies Ihr erstes Mal ist, dass Sie den Arduino Uno R4 WiFi/Minima verwenden, lesen Sie das Tutorial zum Einrichten der Umgebung für Arduino Uno R4 WiFi/Minima in der Arduino IDE.
- Verbinden Sie das Arduino Uno R4-Board gemäß dem bereitgestellten Diagramm mit dem Servomotor und dem Joystick.
- Schließen Sie das Arduino Uno R4-Board mithilfe eines USB-Kabels an Ihren Computer an.
- Starten Sie die Arduino IDE auf Ihrem Computer.
- Wählen Sie das passende Arduino Uno R4-Board (z. B. Arduino Uno R4 WiFi) und den COM-Port aus.
- Kopieren Sie den bereitgestellten Code und öffnen Sie ihn in der Arduino IDE.
- Klicken Sie auf die Schaltfläche Hochladen in der Arduino IDE, um den Code auf Ihren Arduino UNO R4 zu übertragen.
- Öffne den seriellen Monitor.
- Bewege den Joystick in irgendeine Richtung.
- Beobachte die Rotation des Servomotors.
- Überprüfe das Ergebnis im seriellen Monitor.
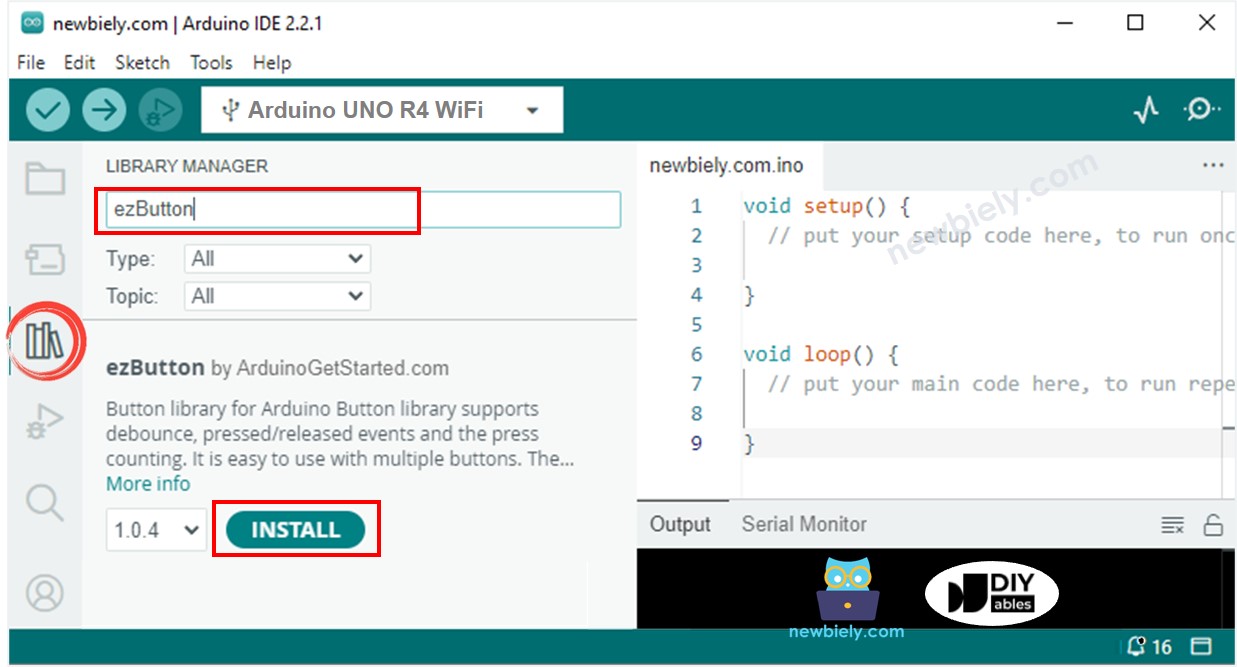
- Gehen Sie zum Bibliotheken-Symbol auf der linken Seite der Arduino IDE.
- Geben Sie ezButton in das Suchfeld ein, und suchen Sie nach der Button-Bibliothek von ArduinoGetStarted.com.
- Klicken Sie auf die Installieren-Schaltfläche, um die ezButton-Bibliothek hinzuzufügen.
- Kopieren Sie den bereitgestellten Code und öffnen Sie ihn in der Arduino IDE.
- Klicken Sie in der Arduino IDE auf die Hochladen-Schaltfläche, um den Code an den Arduino UNO R4 zu senden.
- Öffnen Sie den seriellen Monitor.
- Bewegen Sie den Joystick in eine beliebige Richtung.
- Beobachten Sie, wie sich der Servomotor dreht.
- Überprüfen Sie die Ergebnisse auf dem Serial Radio.
Erforderliche Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables STEM V4 IoT Starter-Kit (Arduino enthalten) | |
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Kaufhinweis: Falls Sie mehrere Servomotoren verwenden möchten, empfehlen wir die Verwendung des PCA9685 16 Channel PWM Servo Driver Module, um MCU-Pins zu sparen und die Verdrahtung zu vereinfachen.
Über Joystick und Servomotor
Wenn Sie mit den Details von Joysticks und Servomotoren, wie Pinbelegung, Funktionalität und Programmierung, nicht vertraut sind, lesen Sie bitte die folgenden Tutorials, um mehr zu erfahren.
Verdrahtungsdiagramm
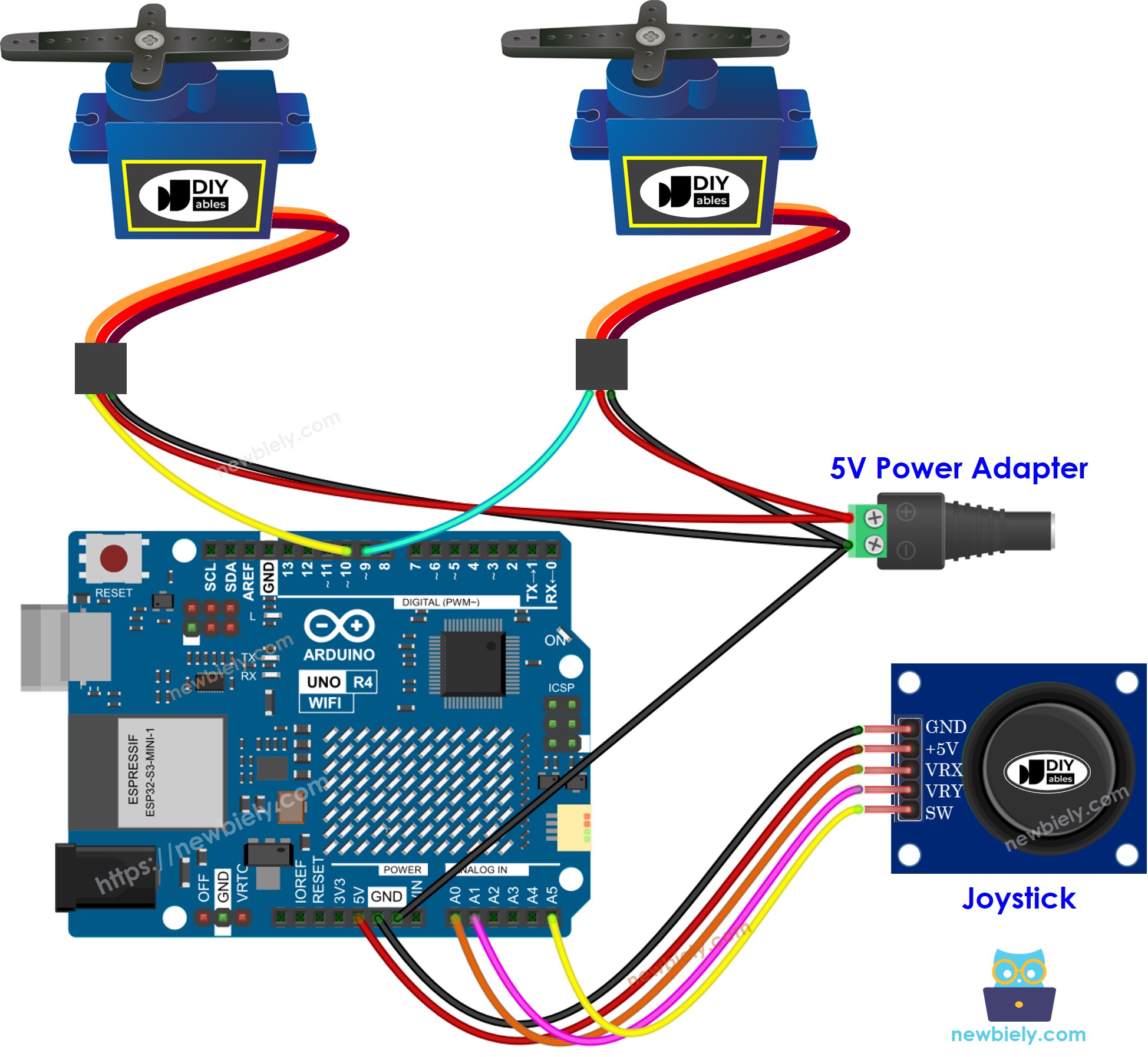
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
Siehe Der beste Weg, den Arduino Uno R4 und andere Komponenten mit Strom zu versorgen.
Arduino UNO R4 Code
Arduino UNO R4 Code - Die Servomotoren drehen sich entsprechend der Bewegung des Daumens am Joystick
Schnelle Schritte
Folgen Sie diesen Anweisungen Schritt für Schritt:

Arduino UNO R4-Code - Verwende den Joystick, um Servomotoren anzusteuern
Schnelle Schritte
Code-Erklärung
Überprüfen Sie die in den Kommentaren des Quellcodes gegebenen Erklärungen!
Video Tutorial
Wir erwägen die Erstellung von Video-Tutorials. Wenn Sie Video-Tutorials für wichtig halten, abonnieren Sie bitte unseren YouTube-Kanal , um uns zu motivieren, die Videos zu erstellen.