Arduino UNO R4 WiFi Bluetooth Joystick Beispiel - 2D-Richtungssteuerung via BLE Tutorial
Überblick
Das Bluetooth Joystick Beispiel bietet eine interaktive 2D-Joystick-Steuerung, die über die DIYables Bluetooth STEM App zugänglich ist. Entwickelt für Arduino UNO R4 WiFi mit BLE (Bluetooth Low Energy), um Echtzeit X/Y-Koordinaten (-100 bis +100) für Richtungssteuerung zu empfangen. Perfekt für Roboternavigation, Pan-Tilt-Servos, Motorsteuerung und Gamecontroller.
Hinweis: Der Arduino UNO R4 WiFi unterstützt nur BLE (Bluetooth Low Energy). Er unterstützt kein Classic Bluetooth. Die DIYables Bluetooth App unterstützt sowohl BLE als auch Classic Bluetooth auf Android und BLE auf iOS. Da dieses Board BLE verwendet, funktioniert die App auf sowohl Android als auch iOS.

Funktionen
- 2D-Steuerung: X- und Y-Achsen mit Bereich -100 bis +100
- Konfigurierbare Empfindlichkeit: Minimale Bewegungsschwelle zum Auslösen von Updates
- Auto-Rückkehr-Option: Joystick kann beim Loslassen automatisch zentrieren
- Echtzeit-Werte: Kontinuierliche Positionsupdates während des Ziehens
- Funktioniert auf Android & iOS: BLE wird auf beiden Plattformen unterstützt
- Keine Kopplung erforderlich: BLE verbindet sich automatisch ohne manuelle Kopplung
- Geringer Stromverbrauch: BLE verbraucht weniger Strom als Classic Bluetooth
Benötigte Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables STEM V4 IoT Starter-Kit (Arduino enthalten) | |
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Arduino UNO R4 WiFi Code
Schnelle Schritte
Folgen Sie diesen Anweisungen Schritt für Schritt:
- Falls Sie zum ersten Mal den Arduino UNO R4 WiFi verwenden, sehen Sie sich den Arduino UNO R4 WiFi Einsteigerleitfaden an.
- Verbinden Sie das Arduino UNO R4 WiFi Board über ein USB-Kabel mit Ihrem Computer.
- Starten Sie die Arduino IDE auf Ihrem Computer.
- Wählen Sie das Arduino UNO R4 WiFi Board und den entsprechenden COM-Port aus.
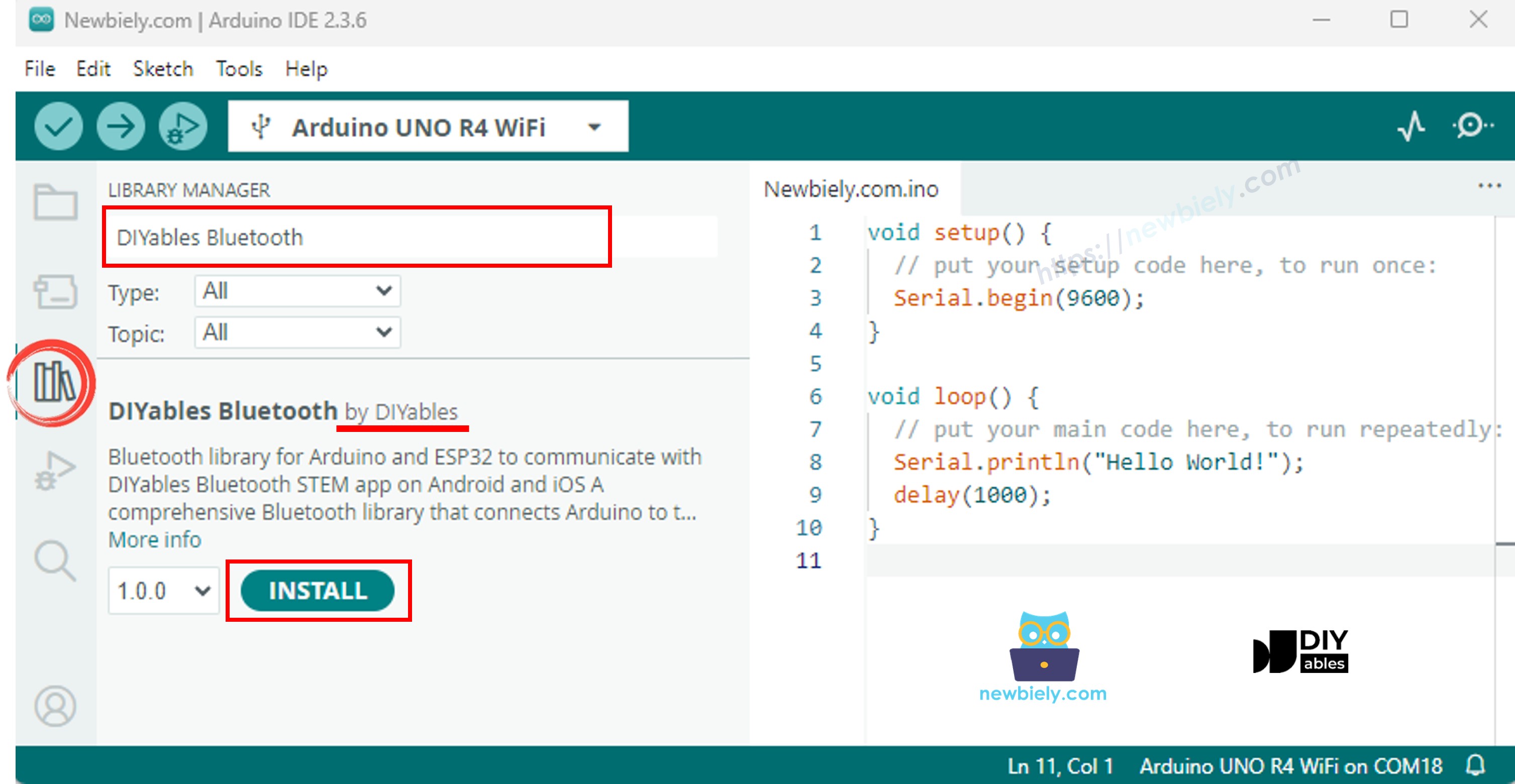
- Navigieren Sie zum Bibliotheken-Symbol in der linken Leiste der Arduino IDE.
- Suchen Sie nach "DIYables Bluetooth" und finden Sie die DIYables Bluetooth Bibliothek von DIYables
- Klicken Sie auf Installieren, um die Bibliothek zu installieren.
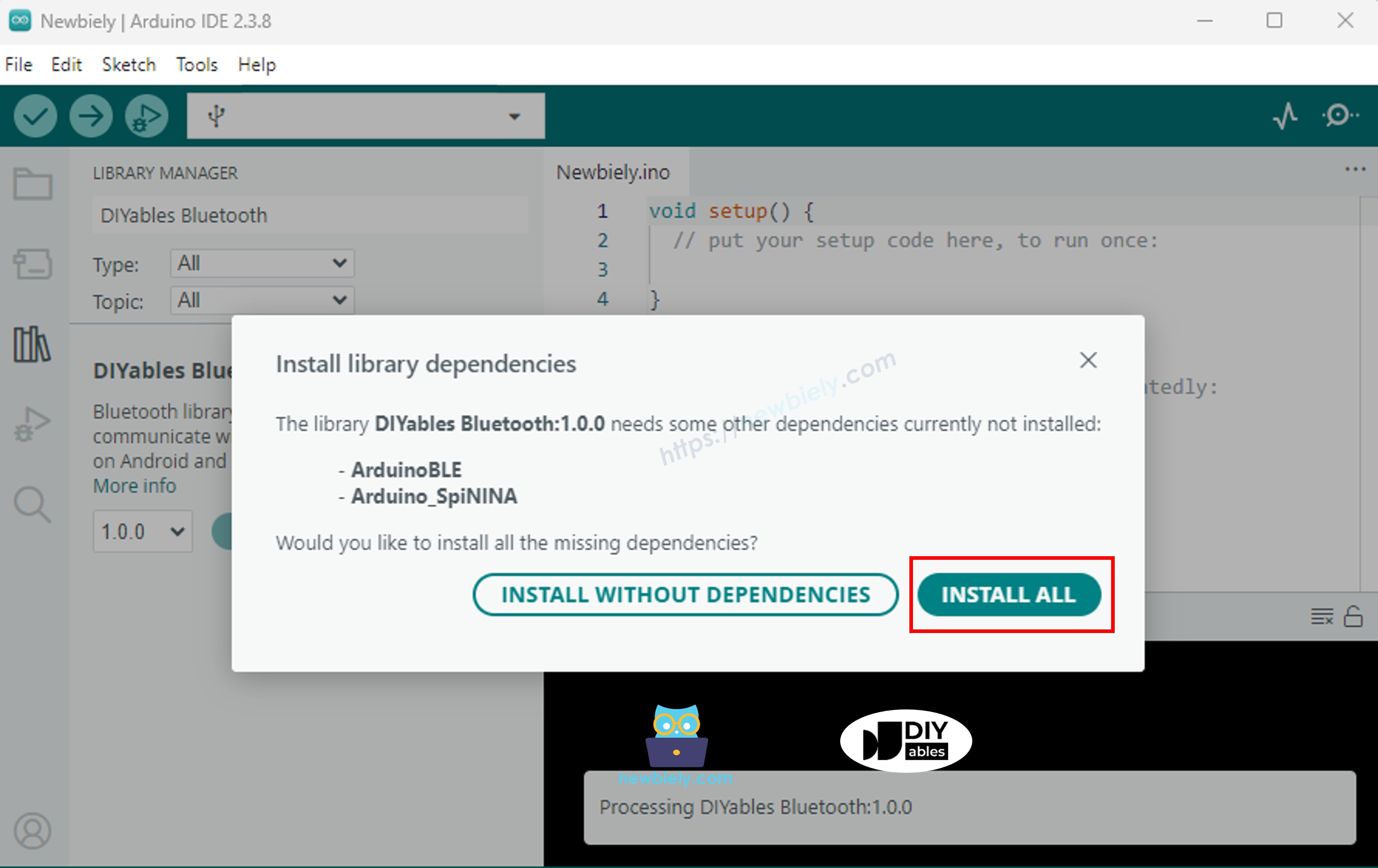
- Sie werden gefragt, ob Sie einige andere Bibliotheksabhängigkeiten installieren möchten
- Klicken Sie auf Alle installieren, um alle Bibliotheksabhängigkeiten zu installieren.
BLE Code
- Gehen Sie in der Arduino IDE zu Datei Beispiele DIYables Bluetooth ArduinoBLE_Joystick, oder kopieren Sie den obigen Code und fügen Sie ihn in den Editor der Arduino IDE ein
- Klicken Sie auf Hochladen in der Arduino IDE, um den Code auf den Arduino UNO R4 WiFi zu übertragen
- Öffnen Sie den Serial Monitor
- Überprüfen Sie das Ergebnis im Serial Monitor. Es sieht folgendermaßen aus:
Mobile App
Hinweis: Die DIYables Bluetooth App unterstützt sowohl BLE als auch Classic Bluetooth auf Android und BLE auf iOS. Da der Arduino UNO R4 WiFi BLE verwendet, funktioniert die App auf sowohl Android als auch iOS. Für BLE ist keine manuelle Kopplung erforderlich — einfach scannen und verbinden.
- Öffnen Sie die DIYables Bluetooth App
- Beim ersten Öffnen der App werden Berechtigungen angefragt. Bitte gewähren Sie folgende:
- Geräte in der Nähe Berechtigung (Android 12+) / Bluetooth Berechtigung (iOS) - erforderlich zum Scannen und Verbinden mit Bluetooth-Geräten
- Standort Berechtigung (nur Android 11 und niedriger) - von älteren Android-Versionen zum Scannen nach BLE-Geräten benötigt
- Stellen Sie sicher, dass Bluetooth auf Ihrem Telefon aktiviert ist
- Tippen Sie auf dem Startbildschirm auf Verbinden. Die App scannt nach BLE-Geräten.
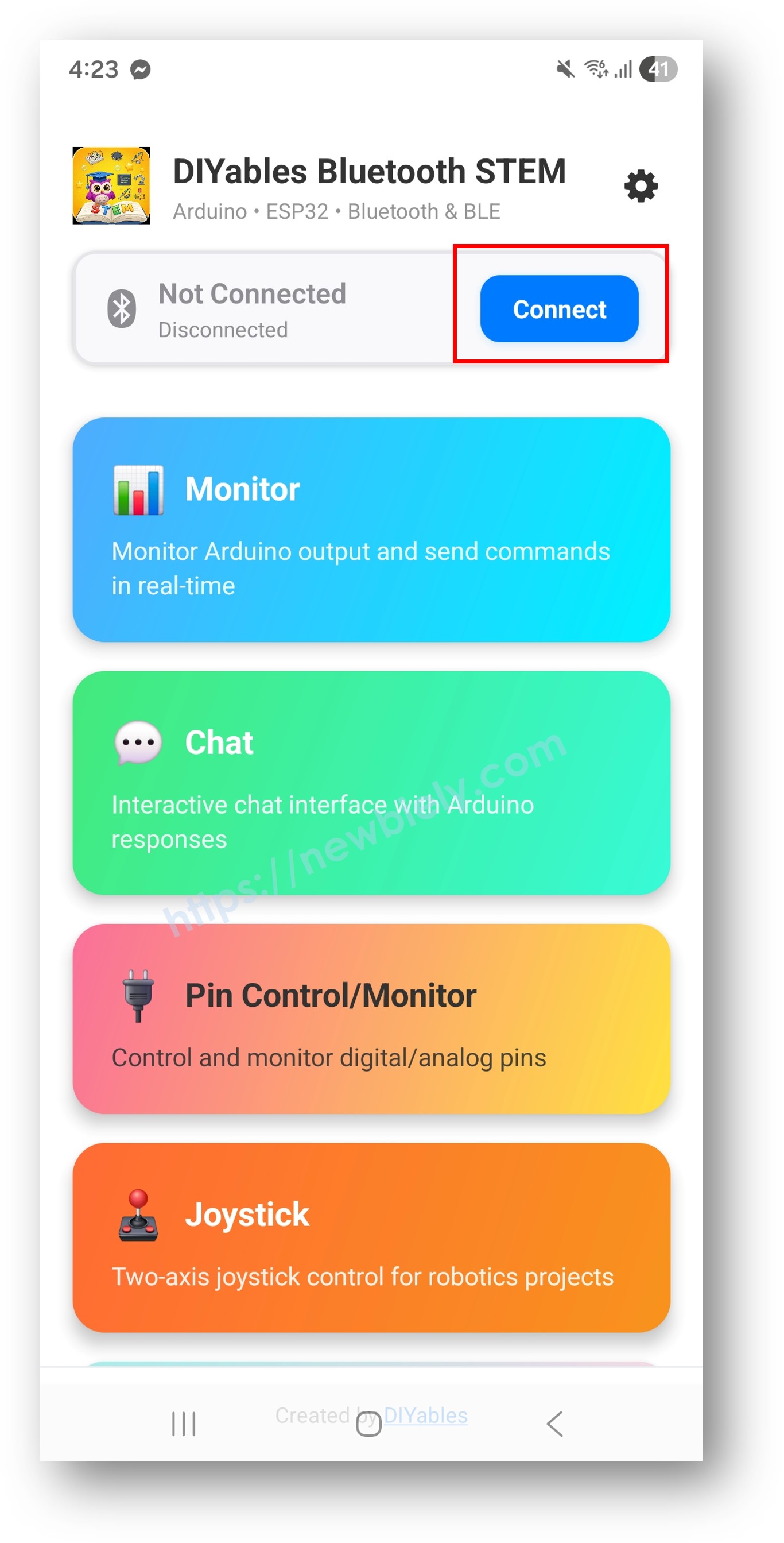
- Finden Sie "Arduino_Joystick" in den Scan-Ergebnissen und tippen Sie darauf, um sich zu verbinden.
- Nach der Verbindung kehrt die App automatisch zum Startbildschirm zurück. Wählen Sie die Joystick App aus dem App-Menü.
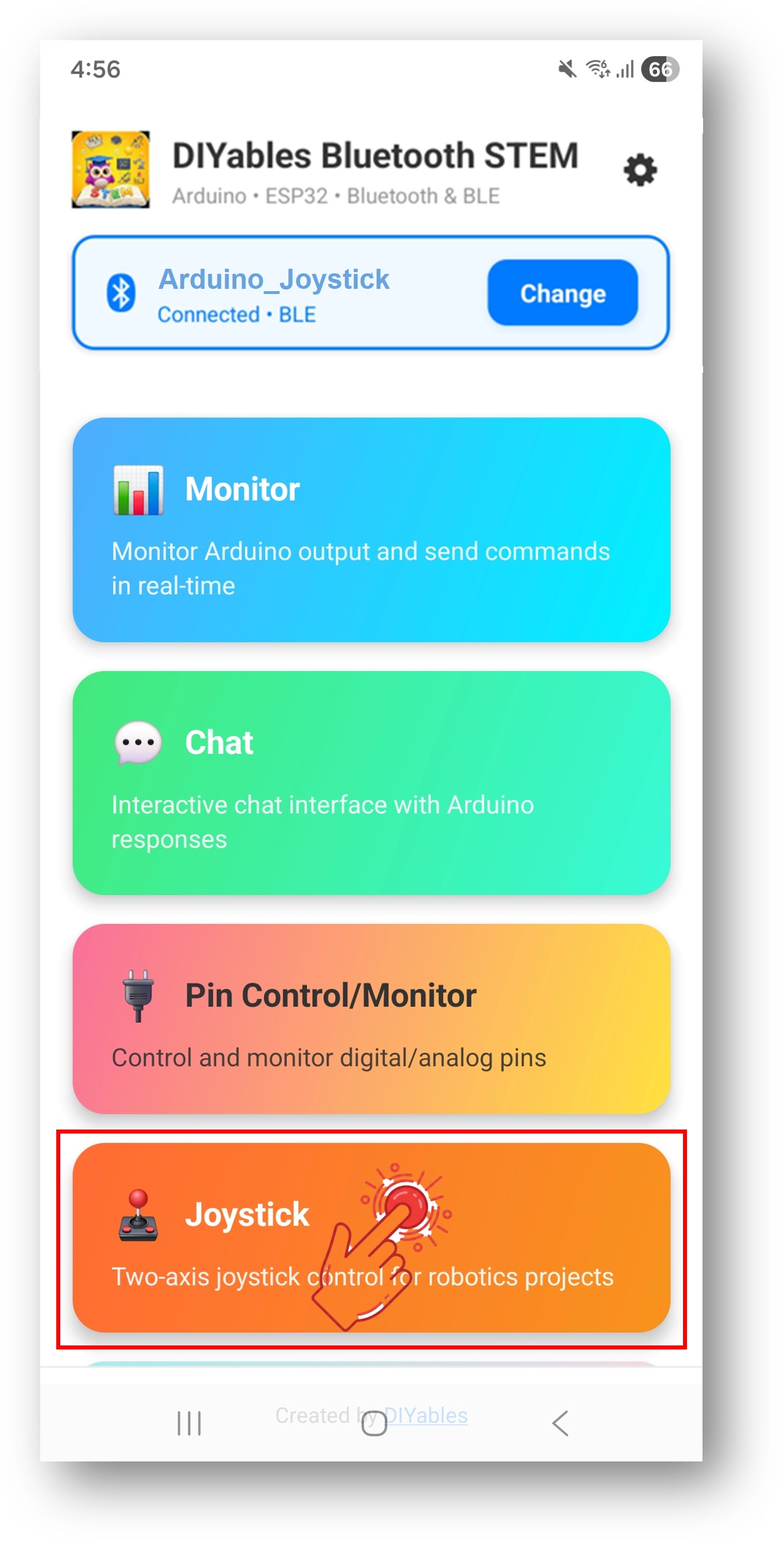
Hinweis: Sie können das Einstellungssymbol auf dem Startbildschirm antippen, um Apps auf dem Startbildschirm ein-/auszublenden. Für weitere Details siehe das DIYables Bluetooth App Benutzerhandbuch.
- Ziehen Sie den Joystick in beliebige Richtungen
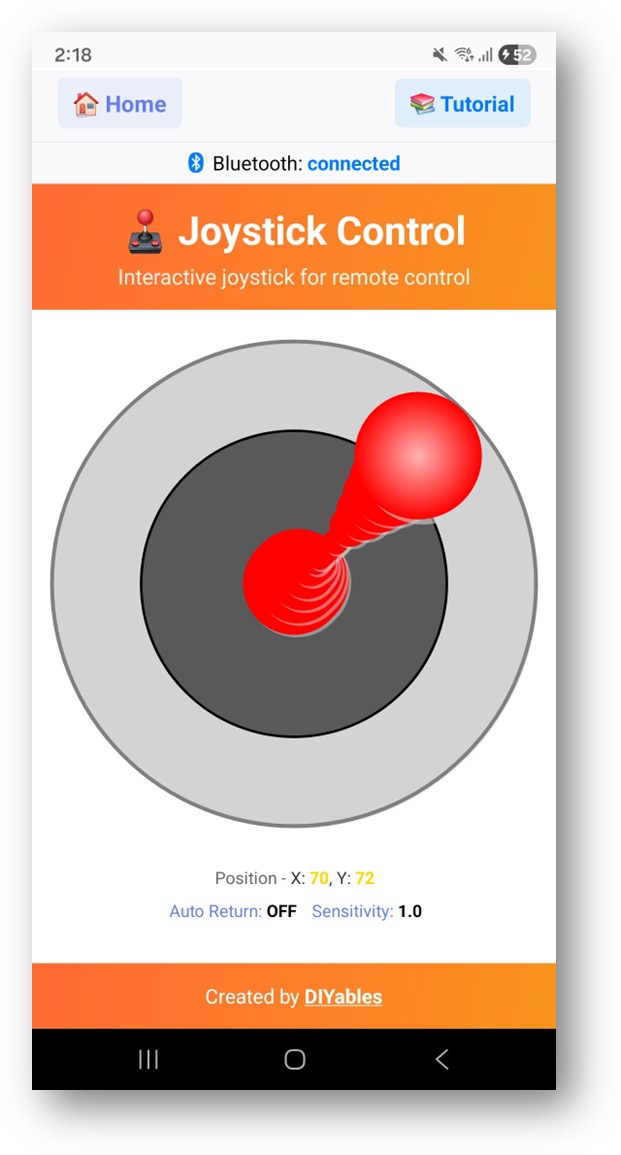
Schauen Sie nun zurück auf den Serial Monitor in der Arduino IDE. Sie werden sehen:
Kreative Anpassung - Code an Ihr Projekt anpassen
Joystick-Werte verarbeiten
Joystick-Einstellungen konfigurieren
Config-Anfrage verarbeiten
Programmierbeispiele
Differential Drive Roboter
Pan-Tilt Servo
Richtung mit Totzone
Fehlerbehebung
Häufige Probleme
1. Gerät kann in der App nicht gefunden werden
- Stellen Sie sicher, dass der Arduino UNO R4 WiFi eingeschaltet ist und der Sketch hochgeladen wurde
- Vergewissern Sie sich, dass Bluetooth auf Ihrem Telefon aktiviert ist
- Auf Android 11 und niedriger aktivieren Sie auch die Standortdienste
2. Joystick reagiert nicht
- Überprüfen Sie den Bluetooth-Verbindungsstatus in der App
- Verifizieren Sie, dass der onJoystickValue Callback korrekt eingerichtet ist
- Prüfen Sie den Serial Monitor auf Verbindungsmeldungen
3. Bewegung fühlt sich träge an
- Reduzieren Sie den Empfindlichkeitswert für häufigere Updates
- Stellen Sie sicher, dass bluetoothServer.loop() ohne lange Verzögerungen aufgerufen wird
4. Werte springen oder sind inkonsistent
- Fügen Sie einen Totzonenfilter für kleine Bewegungen hinzu
- Überprüfen Sie die Empfindlichkeitseinstellung
5. Verbindung bricht häufig ab
- Gehen Sie näher zum Arduino (Entfernung reduzieren)
- Stellen Sie eine stabile USB-Stromversorgung sicher
6. Upload schlägt fehl oder Board wird nicht erkannt
- Installieren Sie das neueste Arduino UNO R4 Board-Paket über den Board Manager
- Probieren Sie ein anderes USB-Kabel oder einen anderen Port
Projektideen
- Drahtloser Roboter-Controller
- Kamera Pan-Tilt-Halterung
- Roboterarm 2-Achsen-Steuerung
- LED-Matrix Positionscontroller
- Gamecontroller für Arduino-Spiele
Nächste Schritte
Nach dem Beherrschen des Bluetooth Joystick Beispiels probieren Sie:
- Bluetooth Slider - Für lineare Wertsteuerung
- Bluetooth Rotator - Für Winkelsteuerung
- Bluetooth Monitor - Für Status-Feedback
- Mehrere Bluetooth Apps - Kombination von Joystick mit anderen Steuerelementen
Support
Für zusätzliche Hilfe:
- Überprüfen Sie die API-Referenzdokumentation
- Besuchen Sie DIYables Tutorials
- Arduino Community-Foren