Arduino WebRotator-Beispiel - Interaktives Tutorial zur Rotationssteuerung
Überblick
Das WebRotator-Beispiel erstellt eine interaktive, drehbare Scheibensteueroberfläche, die von jedem Webbrowser aus zugänglich ist. Entworfen für Arduino Uno R4 WiFi und DIYables STEM V4 IoT Bildungsplattform mit erweiterten Motorsteuerungsmöglichkeiten, integrierten Servo-/Schrittmotorsteuerungsfunktionen und nahtloser Integration mit robotikbezogenen Bildungsmodulen. Perfekt geeignet zur Steuerung von Servomotoren, Schrittmotoren, Roboterarmen, Antennen oder jedem System, das eine präzise Rotationssteuerung erfordert.

Funktionen
- Interaktive drehbare Scheibe: Touch- und mausgesteuerte Scheibenoberfläche
- Duale Betriebsmodi: kontinuierlich (0–360°) und begrenzter Winkelbereich
- Winkelrückmeldung in Echtzeit: Präzise Winkelanzeige und -steuerung
- Visuelle Positionsanzeige: Klarer Positionsmarker der Scheibe mit Farbverlauf-Design
- Touch- und Mausunterstützung: Funktioniert auf Desktop-, Tablet- und Mobilgeräten
- Automatisches Konfigurationshandling: Modus und Bereich einmal im Konstruktor festlegen
- WebSocket-Kommunikation: Sofortige Reaktion ohne Seitenaktualisierung
- Professionelle Benutzeroberfläche: Design mit konischem Verlauf und sanfter Rotation
- Plattform-Erweiterbarkeit: Derzeit für Arduino Uno R4 WiFi implementiert, kann auf andere Hardware-Plattformen erweitert werden. Siehe DIYables_WebApps_ESP32
Erforderliche Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables STEM V4 IoT Starter-Kit (Arduino enthalten) | |
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Kaufhinweis: Falls Sie mehrere Servomotoren verwenden möchten, empfehlen wir die Verwendung des PCA9685 16 Channel PWM Servo Driver Module, um MCU-Pins zu sparen und die Verdrahtung zu vereinfachen.
Installationsanleitung
Schnelle Schritte
Folgen Sie diesen Anweisungen Schritt für Schritt:
- Wenn dies das erste Mal ist, dass Sie das Arduino Uno R4 WiFi/DIYables STEM V4 IoT verwenden, lesen Sie das Tutorial zur Einrichtung der Umgebung für das Arduino Uno R4 WiFi/DIYables STEM V4 IoT in der Arduino IDE.
- Schließen Sie das Arduino Uno R4/DIYables STEM V4 IoT-Board mit einem USB-Kabel an Ihren Computer an.
- Öffnen Sie die Arduino IDE auf Ihrem Computer.
- Wählen Sie das passende Arduino Uno R4-Board (z. B. Arduino Uno R4 WiFi) und den COM-Port aus.
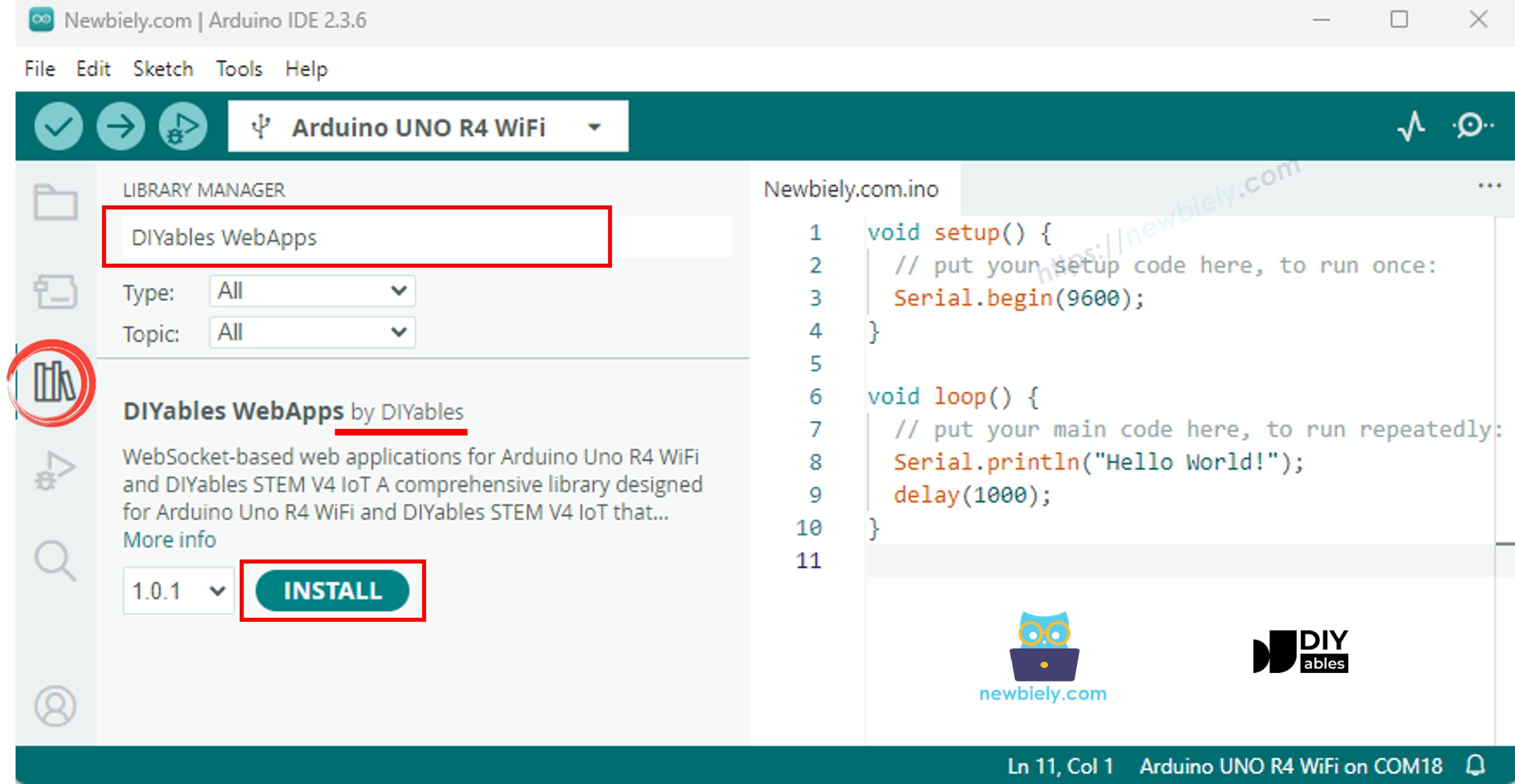
- Gehen Sie zum Bibliotheken-Symbol in der linken Symbolleiste der Arduino IDE.
- Suchen Sie "DIYables WebApps", und finden Sie dann die DIYables WebApps-Bibliothek von DIYables.
- Klicken Sie auf die Schaltfläche Installieren, um die Bibliothek zu installieren.
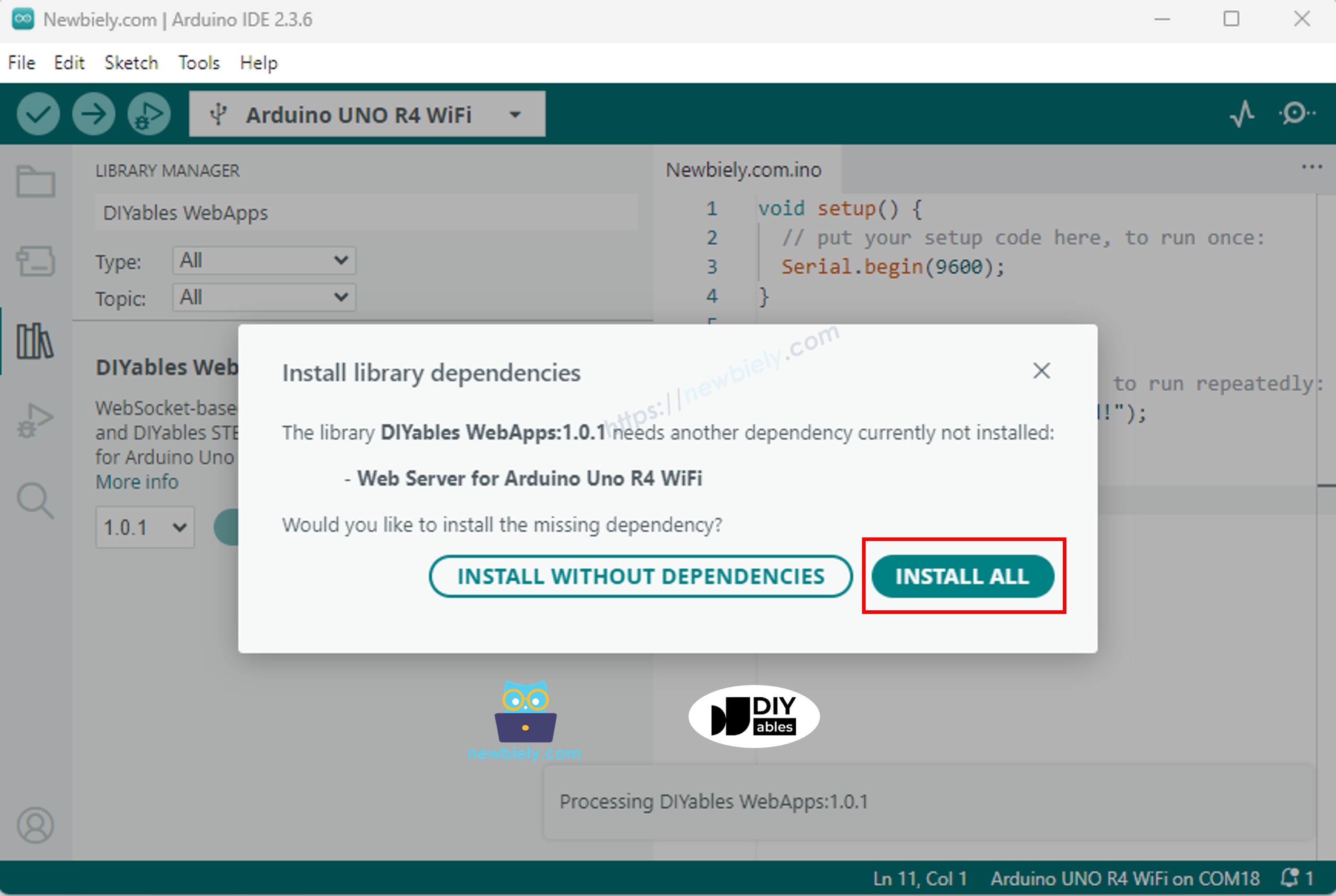
- Sie werden aufgefordert, einige weitere Bibliotheksabhängigkeiten zu installieren.
- Klicken Sie auf die Schaltfläche Alle installieren, um alle Bibliotheksabhängigkeiten zu installieren.
- Im Arduino-IDE, gehe zu Datei Beispiele DIYables WebApps WebRotator Beispiel, oder kopiere den obigen Code und füge ihn in den Editor der Arduino-IDE ein
- Konfigurieren Sie die WLAN-Zugangsdaten im Code, indem Sie diese Zeilen aktualisieren:
- Klicken Sie auf die Schaltfläche Hochladen in der Arduino-IDE, um Code auf den Arduino UNO R4/DIYables STEM V4 IoT hochzuladen
- Öffnen Sie den Serial Monitor
- Schauen Sie sich das Ergebnis im Serial Monitor an. Es sieht unten wie folgt aus
- Wenn Sie nichts sehen, starten Sie das Arduino-Board neu.
- Öffnen Sie einen Webbrowser auf Ihrem PC oder Mobiltelefon.
- Geben Sie die im Serial Monitor angezeigte IP-Adresse in den Webbrowser ein.
- Beispiel: http://192.168.1.100
- Sie sehen die Startseite wie im untenstehenden Bild.
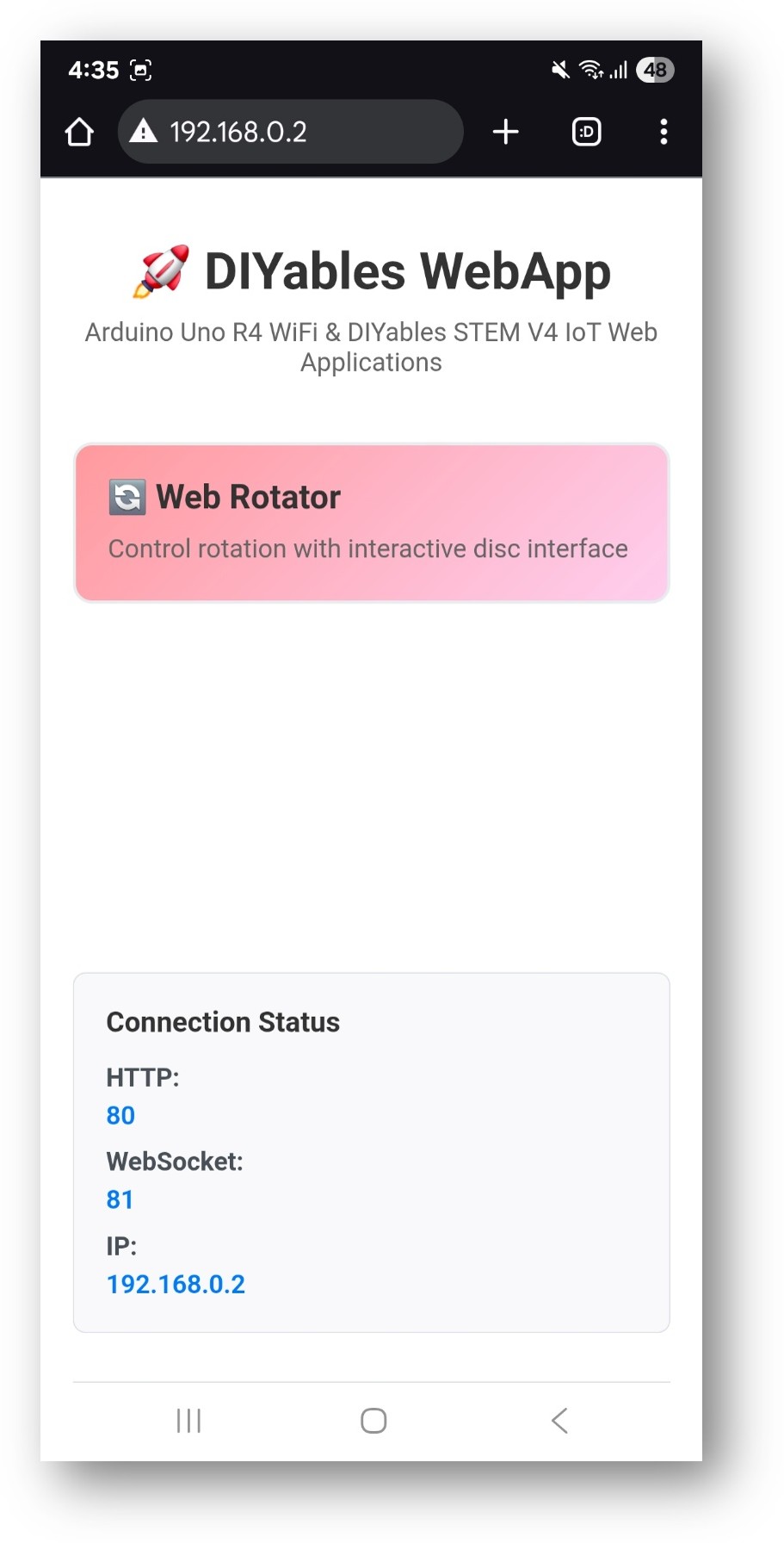
- Klicken Sie auf den Web-Rotator-Link; Sie sehen die Benutzeroberfläche der Web-Rotator-App wie unten:
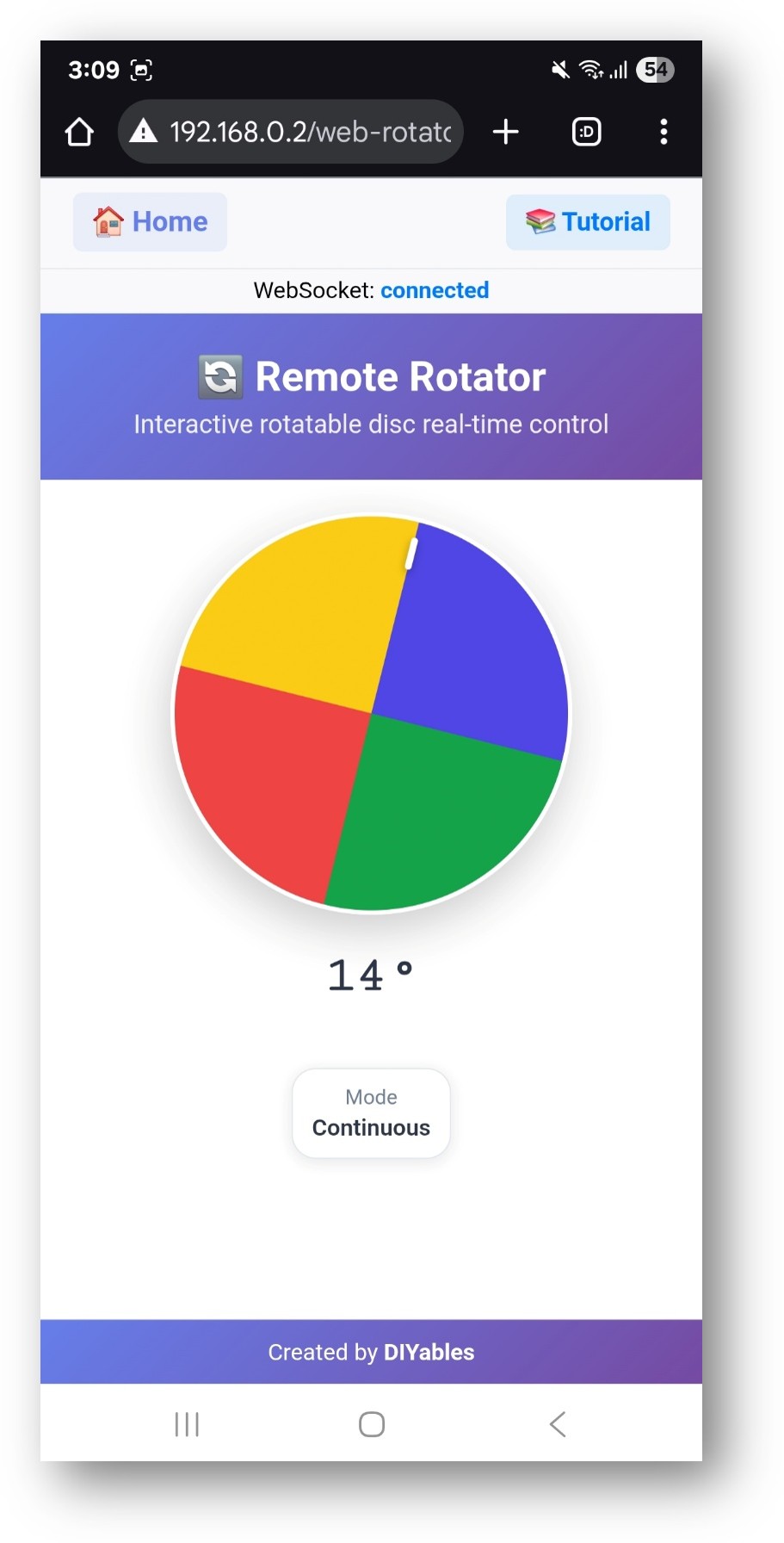
- Oder können Sie die Seite auch direkt über die IP-Adresse aufrufen, gefolgt von /web-rotator. Zum Beispiel: http://192.168.1.100/web-rotator
- Sie sehen eine interaktive, rotierbare Scheibe, die Sie durch Ziehen drehen können, um die Rotation zu steuern
Funktionen der Weboberfläche
Drehbare Scheibensteuerung
- Interaktive Scheibe: Klicken und ziehen, um die Scheibe zu drehen
- Visuelles Feedback: Winkelanzeige in Echtzeit und Positionsanzeige
- Fließende Animation: Flüssige Drehung mit professionellem Farbverlauf
- Winkelanzeige: Aktueller Winkel wird in Grad angezeigt
- Modusanzeige: Zeigt den aktuellen Rotationsmodus und die Grenzwerte
Touch- und Mausunterstützung
- Desktop-Steuerung: Mausklick und Ziehen
- Mobile-Steuerung: Tippen und Wischgesten
- Responsives Design: Optimiert für alle Bildschirmgrößen
- Visuelle Hinweise: Klare Indikatoren für Interaktionsbereiche
Code-Konfiguration
Rotator-Aufbau
Winkelbefehle empfangen
Betriebsarten
Kontinuierlicher Modus
- Vollständige Rotation: 0° bis 360° und darüber hinaus, ohne Obergrenze
- Kein Wrap-Around: Winkelwerte können über 360° hinaussteigen und werden nicht auf 0° zurückgesetzt
- Anwendungsfälle: Kontinuierliche Rotationsservos, Antennen, Drehteller
- Konfiguration: ROTATOR_MODE_CONTINUOUS
Begrenzter Modus
- Benutzerdefinierter Bereich: Definiere minimale und maximale Winkel
- Begrenzungen: Verhindert Rotationen außerhalb der festgelegten Grenzen
- Anwendungsfälle: Standard-Servos, Roboterarme, Lenksysteme
- Konfiguration: ROTATOR_MODE_LIMITED, minAngle, maxAngle
Hardware-Integration
Servomotorsteuerung
Hinweis: Der folgende Codeabschnitt ist ein Teilbeispiel und muss in Ihren Haupt-Arduino-Sketch integriert werden, damit er korrekt funktioniert.
Schrittmotorsteuerung
Anpassungsoptionen
Winkelbereich
- Mindestdrehwinkel: Legen Sie den niedrigsten zulässigen Drehwinkel fest
- Maximaldrehwinkel: Legen Sie den höchsten zulässigen Drehwinkel fest
- Standardposition: Startwinkel beim Systemstart
- Auflösung: Bestimmt die Genauigkeit der Winkelaktualisierungen
Visuelles Erscheinungsbild
Die Weboberfläche passt sich automatisch Ihrer Konfiguration an:
- Bereichsanzeige: Zeigt die konfigurierten Winkelgrenzen an
- Modusanzeige: Zeigt den aktuellen Betriebsmodus an
- Positionsmarkierung: Visuelle Anzeige des aktuellen Winkels
- Gradientendesign: Professionelles Erscheinungsbild mit sanften Farben
Gängige Anwendungsfälle
Bildungsprojekte
- Lernen der Servosteuerung: Verständnis von PWM und Servobetrieb
- Robotik-Unterricht: Armpositionierung, Gelenksteuerung
- Antennenpositionierung: Richtantenne-Steuerung
- Kamera-Schwenken/Neigen: Fernsteuerung der Kameraposition
Praktische Anwendungen
- Hausautomation: Automatisierte Rollläden, Lüftungsgitter, Türen
- Robotik: Gelenke des Roboterarms, Lenkung eines mobilen Roboters
- IoT-Projekte: Fernpositionsbestimmungssysteme
- Industrie: Automatisierte Positionierung, Ventilsteuerung
Fehlerbehebung
Rotation funktioniert nicht
- Überprüfe die WLAN-Verbindung und den WebSocket-Status
- Stelle sicher, dass die Callback-Funktion korrekt gesetzt ist
- Stelle sicher, dass Servo oder Motor ordnungsgemäß verbunden ist
- Überprüfe die Stromversorgung für Motoren
Ungültige Winkelwerte
- Überprüfen Sie die Winkelzuordnung für Ihre spezifische Hardware
- Überprüfen Sie die Servo-Bibliothek und die Pin-Konfiguration
- Stellen Sie sicher, dass die Skalierung in der Callback-Funktion korrekt ist
- Testen Sie mit der Serial Monitor-Ausgabe
Verbindungsprobleme
- Überprüfen Sie die IP-Adresse im Browser
- Überprüfen Sie die Firewall-Einstellungen
- Stellen Sie sicher, dass das 2,4-GHz-WLAN-Netzwerk verwendet wird (5-GHz wird nicht unterstützt)
- Versuchen Sie, die Browser-Seite zu aktualisieren
Erweiterte Funktionen
Laufzeitmodus-Änderungen
Sie können den Rotator-Modus während des Betriebs ändern:
Positionsrückmeldung
Sende die aktuelle Position an die Weboberfläche zurück:
Hinweis: Häufige Winkelrückmeldungen an die Weboberfläche können zu einer weniger flüssigen Bewegung führen. Verwenden Sie diese Funktion nur, wenn Echtzeit-Positionsaktualisierungen erforderlich sind.
Mehrachsensteuerung
Mehrere Rotatoren zur komplexen Positionierung kombinieren:
Bildungsintegration
STEM-Lernziele
- Motorsteuerung: Verständnis der Funktionsweise von Servos und Schrittmotoren
- Koordinatensysteme: Winkelmessung und Positionierung
- Webtechnologien: Echtzeit-Steuerungsschnittstellen
- Programmierung: Callback-Funktionen, Hardwaresteuerung
Unterrichtsaktivitäten
- Servo-Kalibrierung: Lernen Sie den Betrieb von Servos und PWM-Signalen
- Positionssteuerung: Üben Sie präzise Positionsaufgaben
- Systemintegration: Sensoren mit der Motorsteuerung kombinieren
- Problemlösung: Hardware- und Softwareprobleme debuggen
Dieses Beispiel bietet eine umfassende Grundlage für Drehregelungssysteme und ist sowohl für Bildungs- als auch für praktische Robotikanwendungen ideal.