Arduino UNO R4 - Aktuator mit Feedback
Dieses Arduino UNO R4-Tutorial zeigt, wie man einen *Feedback-Linearantrieb* in Ihren DIY-Projekten einsetzt.
In der vorherigen Lektion haben wir einen Linearantrieb ohne Rückkopplung verwendet. Diese Art bewegt sich nur hinein oder hinaus, liefert aber keine Auskunft über seine Position.
Nun lernen wir einen Linearantrieb mit Rückmeldung kennen. Er kann uns während der Bewegung sagen, wo er sich befindet, damit wir seine präzise Position steuern können.
In diesem einfachen Leitfaden wirst du lernen:
- Wie ein Linearantrieb mit Feedback funktioniert – Was er ist und was er tut
- Wie man seine Position bestimmt – Ermitteln Sie seine Lage in Millimetern
- Wie man es an die richtige Stelle bewegt – Steuern Sie es so, dass es genau dort stoppt, wo Sie möchten
Dieses einfache Arduino-Projekt ist gut für Anfänger. Folge dieser einfachen Anleitung, um die Arduino-Programmierung zu erlernen und ein intelligentes Bewegungssystem zu erstellen!
Erforderliche Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables STEM V4 IoT Starter-Kit (Arduino enthalten) | |
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Über den Linearantrieb mit Feedback
Ein Linearantrieb mit Rückkopplung ist eine Art von Linearantrieb, der ein Rückkopplungssignal enthält, um seine Position zu überwachen und zu steuern. Dieses Rückkopplungssignal stammt von einem Potentiometer, das eine Ausgangsspannung liefert, die der Position des Antriebs entspricht.
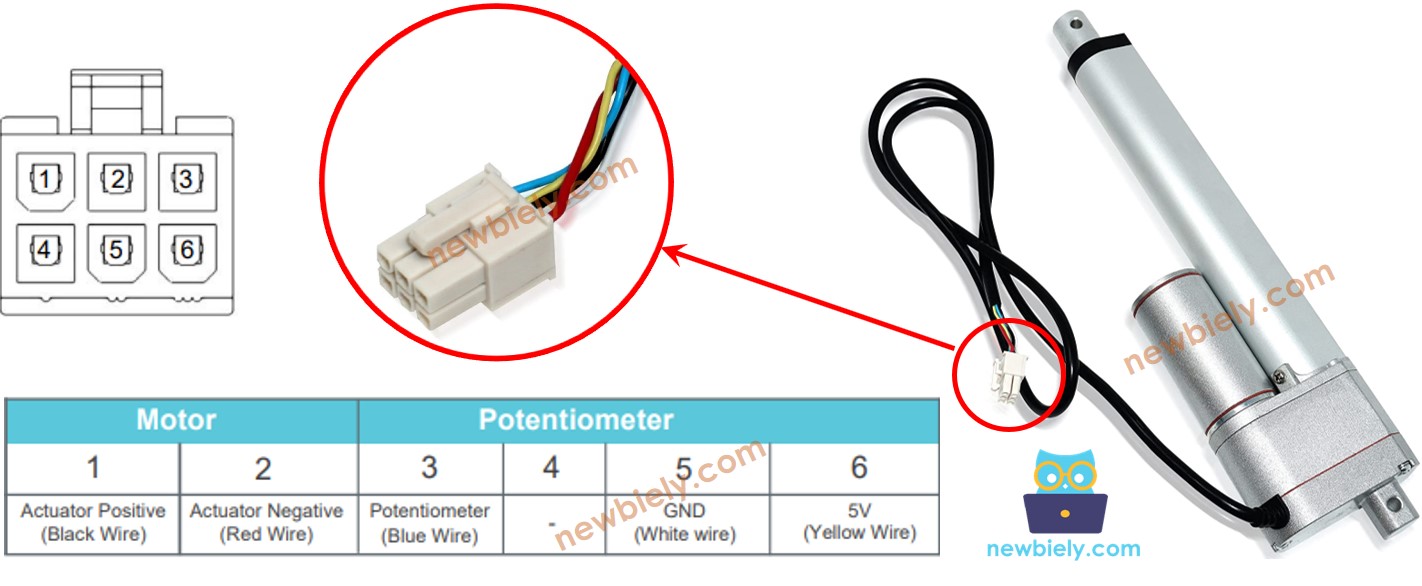
Pinbelegung des Rückkopplungs-Linearantriebs
Ein Linearantrieb mit Feedback hat fünf Drähte:
- Positivleitung des Aktuators: Dieses Kabel steuert den Linearantrieb mit Hochspannung (12 V, 24 V, 48 V).
- 5-V-Leitung: Dieses Kabel ist mit dem Rückkopplungs-Potentiometer verbunden. Schließen Sie es an 5 V oder 3,3 V an.
- GND-Leitung: Dieses Kabel ist mit dem Rückkopplungs-Potentiometer verbunden. Schließen Sie es an Masse (GND) an.
- Potentiometerkabel: Auch bekannt als Rückkopplungs- oder Ausgabekabel, sendet dieses Kabel eine Spannung aus, die sich je nach Position des Hubwegs ändert.
Wie es funktioniert
Wenn wir an die positiven und negativen Drähte eine Hochspannung anlegen, wird der Stellantrieb sich entweder ausfahren oder einfahren. Genauer gesagt, wenn wir anschließen:
- Schließen Sie 12 V (wie 12 V, 24 V, 48 V ...) und GND an die jeweiligen positiven und negativen Kabel an: Der Linearantrieb fährt mit voller Geschwindigkeit aus, bis er am Ende stoppt.
- Schließen Sie 12 V (wie 12 V, 24 V, 48 V ...) und GND an die jeweiligen negativen und positiven Kabel an: Der Linearantrieb fährt mit voller Geschwindigkeit ein, bis er am Ende stoppt.
- Wird die Stromversorgung des Antriebs unterbrochen (GND ist sowohl mit dem positiven als auch mit dem negativen Draht verbunden), während er ausfährt oder einfährt, stoppt der Antrieb die Bewegung.
※ Notiz:
- Die zur Steuerung des Stellantriebs benötigte Spannung variiert je nach seinen Spezifikationen. Prüfen Sie das Datenblatt oder das Handbuch, um die richtige Spannung herauszufinden.
- Der Stellantrieb kann seine Position auch ohne Stromversorgung halten, selbst wenn er ein Gewicht trägt.
Die Spannung im Draht des Potentiometers ändert sich je nachdem, wo sich der Aktuator bewegt. Durch das Ablesen dieser Spannung können wir feststellen, an welcher Position der Hub sich befindet.
Verdrahtungsdiagramm
Bevor Sie verdrahten, entfernen Sie alle drei Jumper vom L298N-Modul.
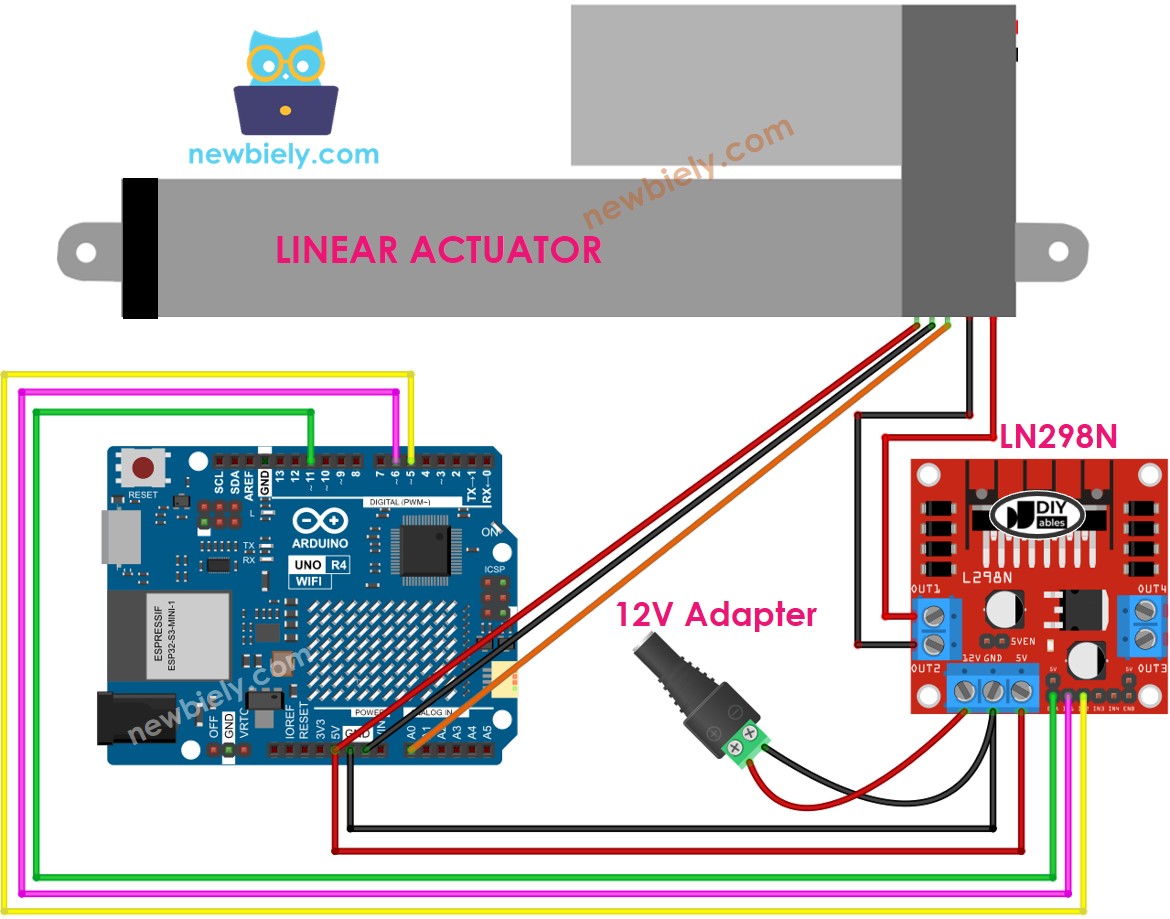
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
Siehe Der beste Weg, den Arduino Uno R4 und andere Komponenten mit Strom zu versorgen.
Wie man einen linearen Aktuator ausfährt und einzieht
Besuchen Sie das Tutorial zum Arduino UNO R4-Aktuator hier.
Wie man die Position des Linearantriebs findet
So finden Sie die Hubposition eines Linearantriebs:
Kalibrierung
- Messen Sie den Hub des Aktuators (in Millimetern) mit einem Lineal oder prüfen Sie das Datenblatt.
- Ermitteln Sie die Ausgabewerte, wenn der Linearantrieb vollständig ausgefahren bzw. eingefahren ist, indem Sie den folgenden Code ausführen.
- Sie sehen das Protokoll im Serial Monitor, wie im untenstehenden Beispiel gezeigt.
- Notiere diese Werte.
- Wenn die minimalen und maximalen Werte vertauscht sind, tausche IN1_PIN mit IN2_PIN.
- Passe drei Werte im untenstehenden Code an.
Arduino UNO R4-Code, der die Position des Aktuators berechnet
- Ändere die drei angepassten Werte im Code
- Lade den Code auf den Arduino UNO R4
- Überprüfe das Ergebnis im Serial Monitor
Wie man einen Linearantrieb auf eine bestimmte Position steuert
Video Tutorial
Wir erwägen die Erstellung von Video-Tutorials. Wenn Sie Video-Tutorials für wichtig halten, abonnieren Sie bitte unseren YouTube-Kanal , um uns zu motivieren, die Videos zu erstellen.
Zusammenfassung
In diesem Arduino UNO R4-Tutorial lernst du, wie man einen Linearantrieb mit Rückmeldung für DIY-Projekte verwendet. Diese einfache Anleitung erklärt dir, wie der Linearantrieb funktioniert, wie man seine Position in Millimetern bestimmt und wie man ihn mit Arduino-Programmierung an die richtige Stelle bewegt. Nach unserer Lektion über einen Linearantrieb ohne Rückmeldung zeigt dir dieses einfache Arduino-Projekt, wie man ein intelligentes Bewegungssystem baut. Jetzt kannst du deine eigenen Bewegungssteuerungsprojekte mit dem Arduino UNO R4 bauen!