Arduino Nano ESP32 - MG996R
In diesem Tutorial lernen wir, wie man den MG996R Hochdrehmoment-Servomotor mit dem Arduino Nano ESP32 verwendet.
Erforderliche Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Kaufhinweis: Falls Sie mehrere Servomotoren verwenden möchten, empfehlen wir die Verwendung des PCA9685 16 Channel PWM Servo Driver Module, um MCU-Pins zu sparen und die Verdrahtung zu vereinfachen.
Über den Servomotor
Der MG996R-Servomotor ist ein Hochdrehmoment-Servomotor, der in der Lage ist, eine Last von bis zu 15 kg zu heben. Der Motor kann seine Welle von 0° bis 180° drehen und ermöglicht so eine präzise Kontrolle der Winkelposition. Für grundlegende Informationen zu Servomotoren verweisen Sie bitte auf das Tutorial Arduino Nano ESP32 - Servo Motor.
Pinbelegung
Der MG996R-Servomotor, der in diesem Beispiel verwendet wird, verfügt über drei Pins:
- VCC-Pin: (typischerweise rot) muss mit VCC verbunden werden (4,8 V – 7,2 V)
- GND-Pin: (typischerweise schwarz oder braun) muss mit GND (0 V) verbunden werden
- Signal-Pin: (typischerweise gelb oder orange) empfängt das PWM-Steuersignal vom Pin eines ESP32.

Verdrahtungsdiagramm
Da der MG996R ein Hochdrehmoment-Servomotor ist, zieht er viel Strom. Wir sollten diesen Motor nicht über den 5-V-Pin des Arduino Nano ESP32 mit Strom versorgen. Stattdessen müssen wir eine externe Stromversorgung für den MG996R-Servomotor verwenden.
- Wenn das Arduino Nano ESP32-Board über den USB-Anschluss mit Strom versorgt wird.
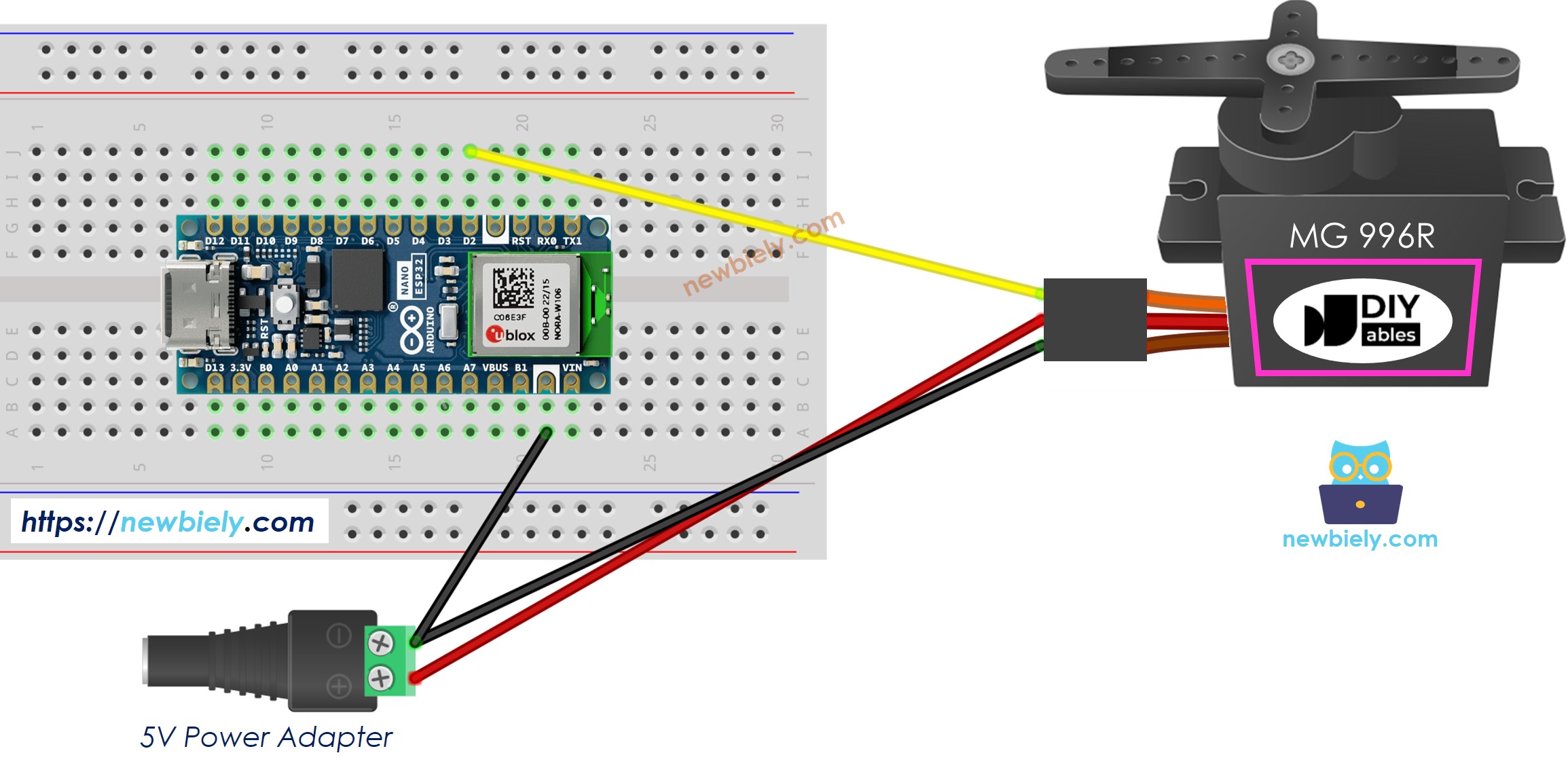
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
- Wenn das Arduino Nano ESP32-Board über den Vin-Pin mit Strom versorgt wird.
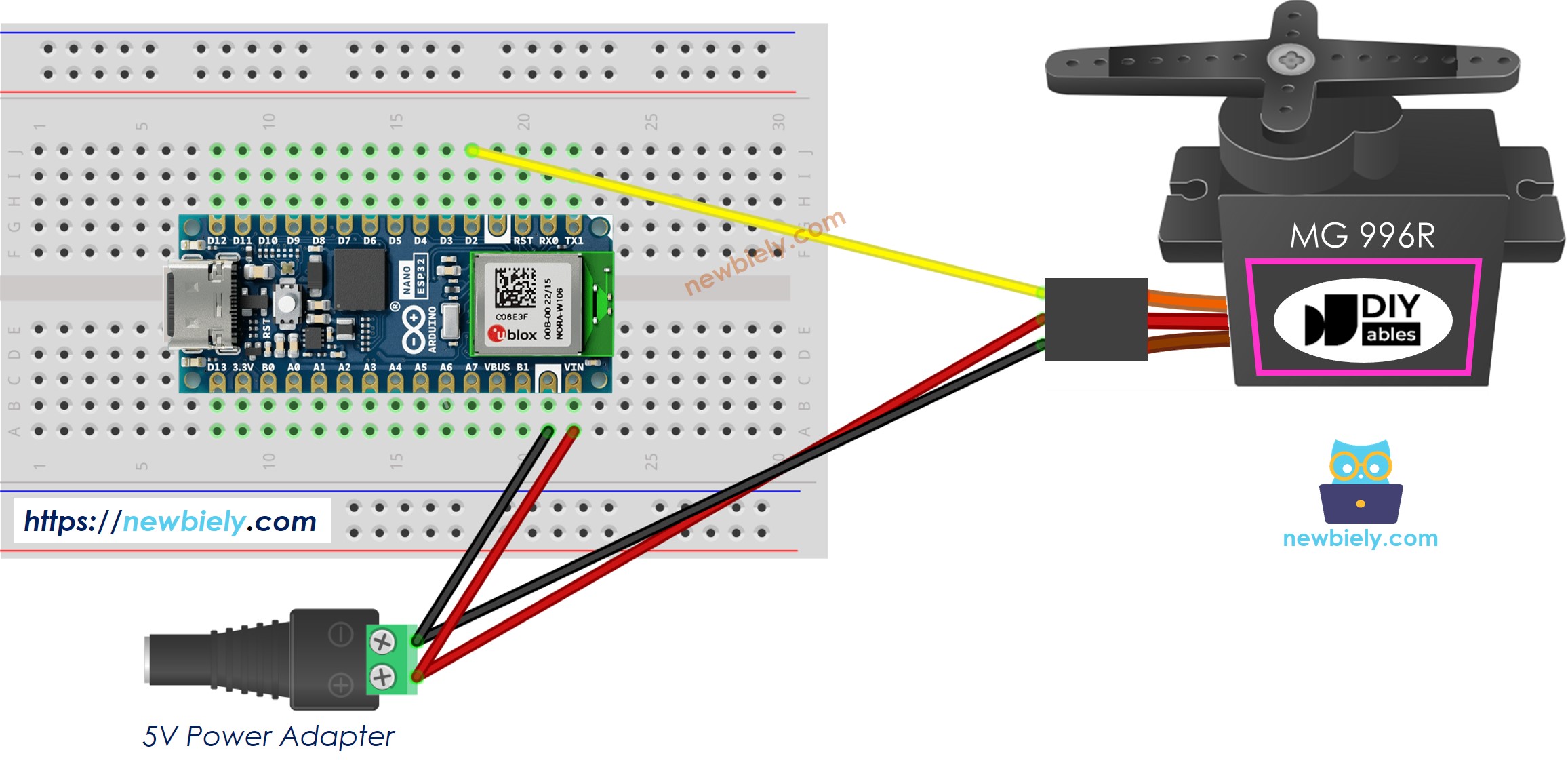
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
Arduino Nano ESP32 Code
Schnelle Schritte
Um mit dem Arduino Nano ESP32 zu beginnen, befolgen Sie diese Schritte:
- Wenn Sie neu bei Arduino Nano ESP32 sind, lesen Sie das Tutorial wie man die Umgebung für Arduino Nano ESP32 in der Arduino IDE einrichtet.
- Verdrahten Sie die Bauteile gemäß dem bereitgestellten Diagramm.
- Schließen Sie das Arduino Nano ESP32-Board über ein USB-Kabel an Ihren Computer an.
- Starten Sie die Arduino IDE auf Ihrem Computer.
- Wählen Sie das Arduino Nano ESP32-Board und den entsprechenden COM-Anschluss aus.
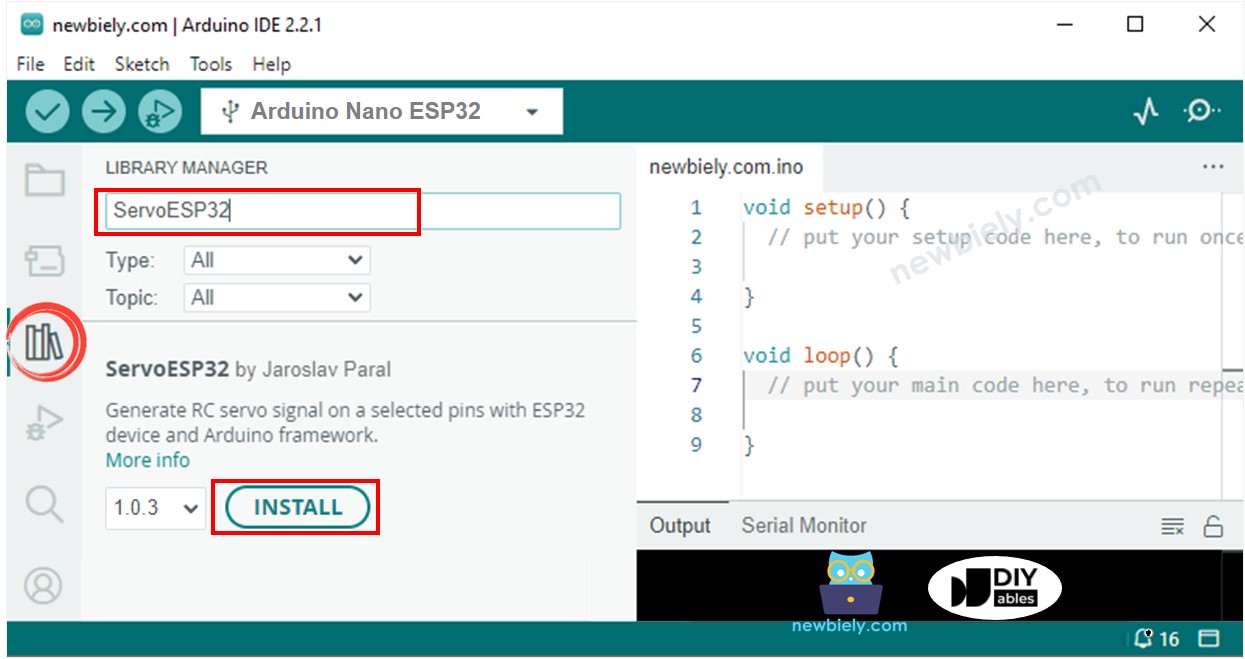
- Klicken Sie auf das Libraries-Symbol in der linken Leiste der Arduino IDE.
- Geben Sie ESP32Servo in das Suchfeld ein, suchen Sie anschließend nach der Servo-Bibliothek von Kevin Harrington,John K. Bennett.
- Klicken Sie auf die Install-Schaltfläche, um die Servo-Bibliothek für Arduino Nano ESP32 zu installieren.
- Schließe Arduino Nano ESP32 über ein USB-Kabel an den PC an
- Öffne die Arduino IDE, wähle das richtige Board und den passenden Port
- Kopiere den obigen Code und öffne ihn mit der Arduino IDE
- Klicke auf die Schaltfläche Hochladen in der Arduino IDE, um den Code auf den Arduino Nano ESP32 hochzuladen

- Siehe das Ergebnis: Der Servomotor dreht sich langsam von 0 bis 180° und danach wieder langsam von 180° zurück nach 0°.
Code-Erklärung
Sie finden die Erklärung in der Kommentarzeile des oben genannten Arduino-Codes.
So steuern Sie die Geschwindigkeit eines Servomotors.
Durch die Verwendung der map() und millis() Funktionen können wir die Geschwindigkeit des Servomotors reibungslos steuern, ohne den übrigen Code zu blockieren.
Video Tutorial
Wir erwägen die Erstellung von Video-Tutorials. Wenn Sie Video-Tutorials für wichtig halten, abonnieren Sie bitte unseren YouTube-Kanal , um uns zu motivieren, die Videos zu erstellen.