Arduino Nano ESP32 - Potentiometer-Servomotor
Dieses Tutorial zeigt dir, wie du den Winkel eines Servomotors mit dem Arduino Nano ESP32 basierend auf dem Eingabewert eines Potentiometers steuern kannst. Im Detail werden wir Folgendes lernen:
- Wie man das Potentiometer und den Servomotor mit dem Arduino Nano ESP32 verbindet
- Wie man den Arduino Nano ESP32 programmiert, um den Wert eines Potentiometers auszulesen und einen Servomotor entsprechend zu steuern
Erforderliche Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Kaufhinweis: Falls Sie mehrere Servomotoren verwenden möchten, empfehlen wir die Verwendung des PCA9685 16 Channel PWM Servo Driver Module, um MCU-Pins zu sparen und die Verdrahtung zu vereinfachen.
Über Servomotor und Potentiometer
Wenn Sie mit Servo-Motoren und Potentiometern, einschließlich Pinbelegung, Funktionsweise und Programmierung, nicht vertraut sind, sind die folgenden Tutorials hilfreich:
Verdrahtungsdiagramm
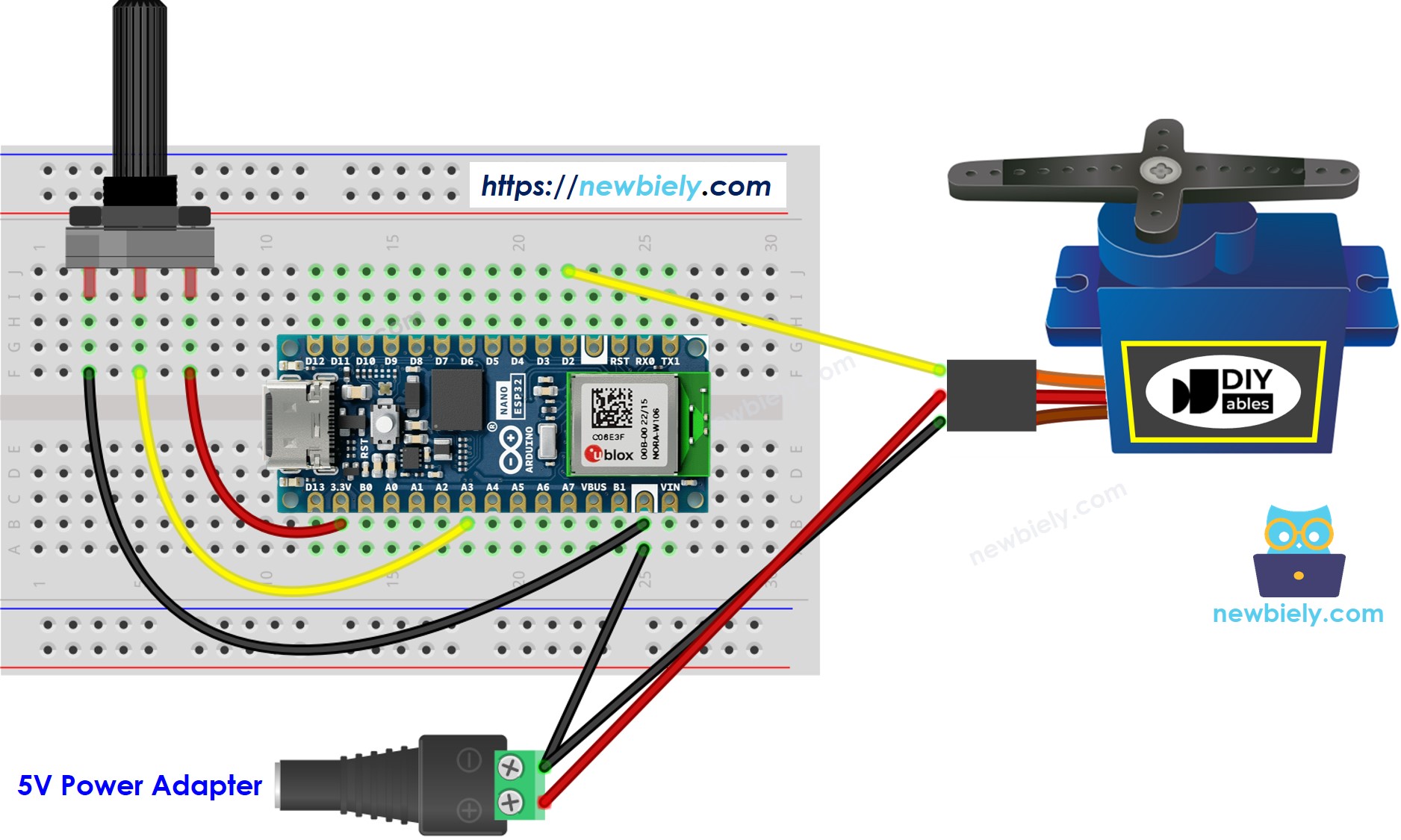
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
Wie man programmiert
- Lies den Wert des Potentiometers (von 0 bis 1023)
- Konvertieren Sie es in einen Winkel im Bereich von 0 bis 180.
- Stellen Sie das Servo auf den angegebenen Winkel ein.
Arduino Nano ESP32-Quellcode
Schnelle Schritte
- Wenn Sie neu bei Arduino Nano ESP32 sind, lesen Sie das Tutorial zur Einrichtung der Umgebung für Arduino Nano ESP32 in der Arduino IDE: wie man die Umgebung für Arduino Nano ESP32 in der Arduino IDE einrichtet.
- Verbinden Sie die Komponenten wie im Diagramm gezeigt.
- Verbinden Sie das Arduino Nano ESP32-Board mit Ihrem Computer über ein USB-Kabel.
- Öffnen Sie die Arduino IDE auf Ihrem Computer.
- Wählen Sie die Arduino Nano ESP32-Platine und den jeweiligen COM-Port aus.
- Kopieren Sie den obigen Code und öffnen Sie ihn in der Arduino IDE.
- Klicken Sie in der Arduino IDE auf die Hochladen-Schaltfläche, um den Code auf das Arduino Nano ESP32 zu übertragen.

- Öffne den seriellen Monitor
- Drehe das Potentiometer
- Überprüfe die Rotation des Servomotors
- Schau dir das Ergebnis im seriellen Monitor an
Code-Erklärung
Schau dir die Zeilen-für-Zeile-Erklärung an, die in den Kommentaren des Quellcodes enthalten ist!
Video Tutorial
Wir erwägen die Erstellung von Video-Tutorials. Wenn Sie Video-Tutorials für wichtig halten, abonnieren Sie bitte unseren YouTube-Kanal , um uns zu motivieren, die Videos zu erstellen.