Arduino Nano ESP32 - Hindernissensor
Dieses Tutorial zeigt Ihnen, wie Sie den Arduino Nano ESP32 mit dem Infrarot-Hinderniserkennungssensor verwenden, um das Vorhandensein des Hindernisses zu erkennen.
Erforderliche Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Über IR-Hinderniserkennungssensor
Der IR-(Infrarot-)Hindernissensor dient dazu, festzustellen, ob sich vor dem Sensorsmodul ein Hindernis befindet, indem das IR-Signal genutzt wird. Der Erkennungsbereich liegt zwischen 2 cm und 30 cm und ist durch ein eingebautes Potentiometer verstellbar.
Pinbelegung
Ein IR-Hindernisvermeidungssensor hat drei Pins:
- GND-Pin: Verbinde diesen Pin mit GND (0 V)
- VCC-Pin: Verbinde diesen Pin mit VCC (5 V oder 3,3 V)
- OUT-Pin: ist ein Ausgangspin: LOW, wenn ein Hindernis vorhanden ist, HIGH, wenn kein Hindernis vorhanden ist. Dieser Pin muss mit dem Eingangspin des ESP32 verbunden werden.
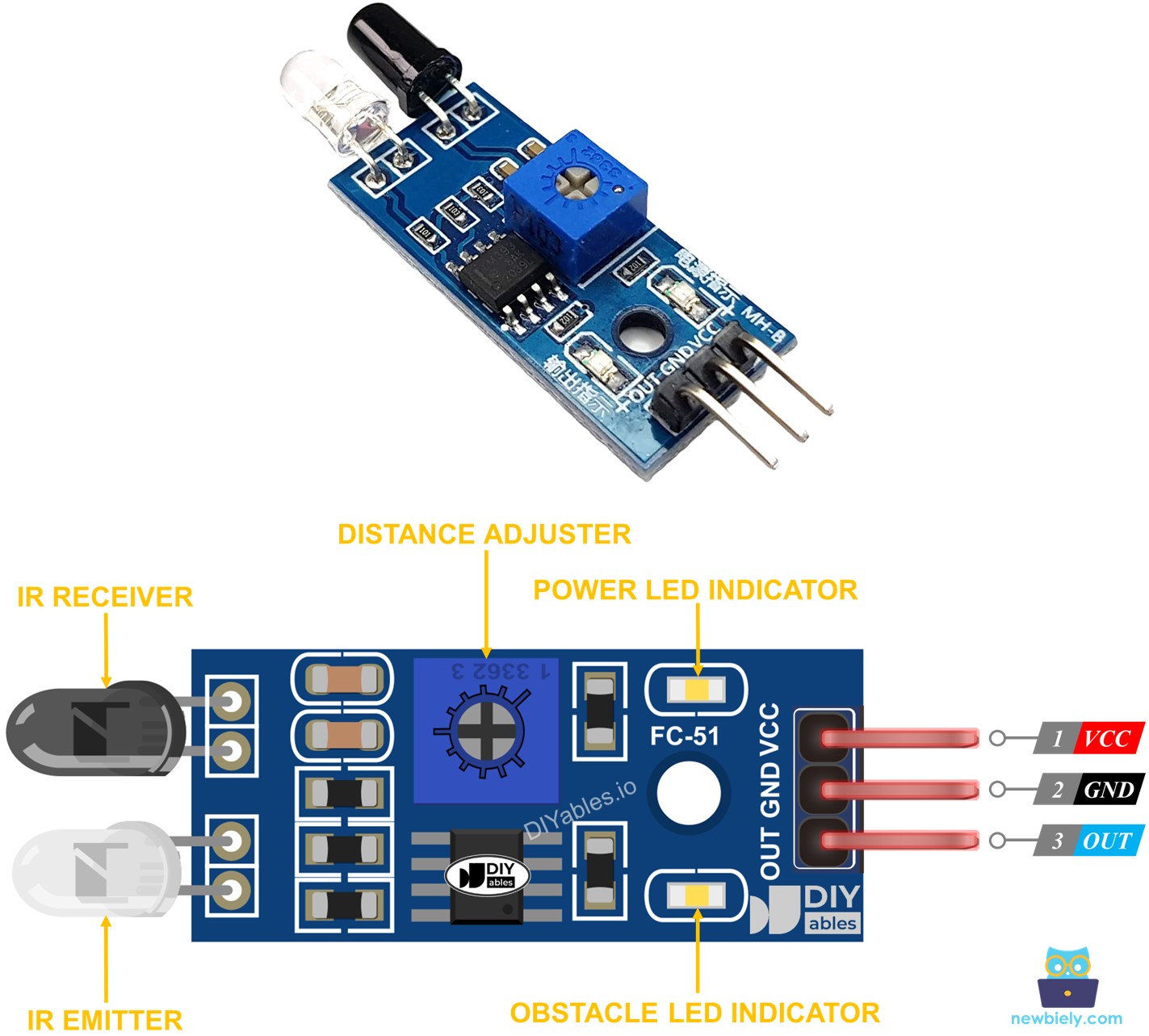
Wie es funktioniert
Ein Infrarot-Hinderniserkennungssensor-Modul besteht aus einem IR-Sender und einem IR-Empfänger. Der IR-Sender emittiert das IR-Signal, während der IR-Empfänger nach dem reflektierten IR-Signal sucht, um festzustellen, ob ein Objekt vorhanden ist oder nicht. Die Anwesenheit eines Hindernisses wird am OUT-Pin angezeigt:
- Wenn das Hindernis vorhanden ist, ist der OUT-Pin des Sensors LOW
- Wenn das Hindernis NICHT vorhanden ist, ist der OUT-Pin des Sensors HIGH
※ Notiz:
Während des Transports kann sich der Sensor verformen, was zu Fehlfunktionen führen kann. Wenn der Sensor nicht ordnungsgemäß funktioniert, justieren Sie den IR-Sender und den IR-Empfänger so, dass sie zueinander parallel ausgerichtet sind.
Verdrahtungsdiagramm
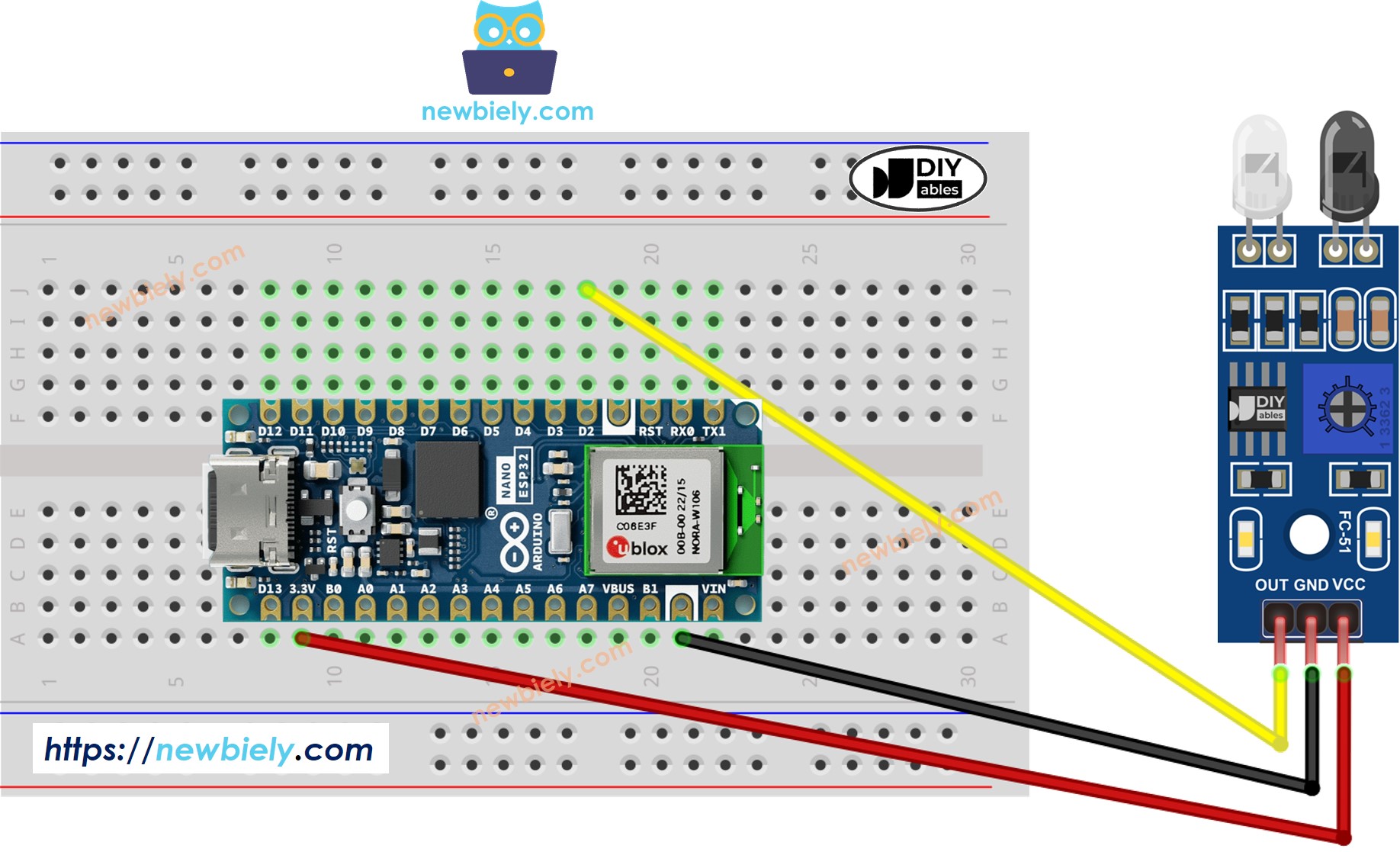
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
Wie man einen IR-Hindernisvermeidungsensor programmiert
- Initialisiert den Pin des Arduino Nano ESP32 auf den digitalen Eingangsmodus, indem die pinMode()-Funktion verwendet wird. Zum Beispiel Pin D2
- Liest den Zustand des Arduino Nano ESP32-Pins mithilfe der Funktion digitalRead().
Arduino Nano ESP32-Code
Es gibt zwei Anwendungsfälle zur Implementierung einer Hindernisvermeidungsanwendung:
- Ergreife Maßnahmen, egal, ob das Hindernis vorhanden ist oder nicht.
- Ergreife Maßnahmen, wenn das Hindernis erkannt wird oder beseitigt wird.
Arduino Nano ESP32-Code zur Überprüfung, ob ein Hindernis vorhanden ist
Schnelle Schritte
- Wenn Sie Arduino Nano ESP32 zum ersten Mal verwenden, sehen Sie sich wie man die Umgebung für Arduino Nano ESP32 in der Arduino IDE einrichtet an.
- Kopieren Sie den obigen Code und fügen Sie ihn in die Arduino IDE ein.
- Kompilieren Sie den Code und laden Sie ihn auf das Arduino Nano ESP32-Board hoch, indem Sie in der Arduino IDE auf die Hochladen-Schaltfläche klicken.
- Legen Sie für eine Weile ein Hindernis vor den Sensor und entfernen Sie es anschließend wieder.
- Überprüfen Sie das Ergebnis im seriellen Monitor. Es sieht wie folgt aus:
Arduino Nano ESP32-Code zur Hinderniserkennung
Schnelle Schritte
- Kopieren Sie den obigen Code und fügen Sie ihn in die Arduino IDE ein.
- Kompilieren Sie den Code und laden Sie ihn auf das Arduino Nano ESP32-Board hoch, indem Sie auf die Schaltfläche Hochladen in der Arduino IDE klicken.
- Platzieren Sie für eine Weile ein Hindernis vor dem Sensor und entfernen Sie es anschließend wieder.
- Überprüfen Sie das Ergebnis im seriellen Monitor. Es sieht wie folgt aus:
Video Tutorial
Wir erwägen die Erstellung von Video-Tutorials. Wenn Sie Video-Tutorials für wichtig halten, abonnieren Sie bitte unseren YouTube-Kanal , um uns zu motivieren, die Videos zu erstellen.