Arduino Mega - DIP-Schalter
Willkommen zu diesem umfassenden Arduino Mega DIP-Schalter Tutorial! In diesem detaillierten Leitfaden erfahren Sie, wie Sie DIP-Schalter (Dual In-line Package Switches) in Ihre Arduino-Projekte für benutzerkonfigurierbare Einstellungen, Adressauswahl, Betriebsmodus-Steuerung und binäre Eingabekodierung integrieren können. DIP-Schalter sind die physische Konfigurationsschnittstelle, die in unzähligen elektronischen Geräten zu finden ist, von Industrieausrüstung bis zu Verbraucherprodukten, und das Erlernen ihrer Verwendung mit Ihrem Arduino Mega eröffnet eine Welt anpassbarer, benutzergesteuerter Projekte.
DIP-Schalter sind miniaturisierte Wippe- oder Schiebeschalter, die in einem kompakten Inline-Gehäuse angeordnet sind und eine einfache, aber leistungsstarke Möglichkeit für Benutzer oder Techniker bieten, Hardware-Einstellungen zu konfigurieren, ohne neu programmieren zu müssen. Im Gegensatz zu Tastern, die momentane Eingaben liefern, behalten DIP-Schalter ihre Position bei, was sie perfekt für dauerhafte Konfigurationseinstellungen macht, die während des Betriebs konstant bleiben sollten. Egal, ob Sie ein Gerät mit mehreren Betriebsmodi bauen, adressierbare Module für Mehrsystem-Netzwerke erstellen, Sicherheitssysteme mit Zugangs-codes entwerfen oder Produkte mit feldkonfigurierbaren Optionen entwickeln - DIP-Schalter bieten eine zuverlässige Konfigurationslösung, die keine Programmierung erfordert.
In diesem Arduino Mega DIP-Schalter Tutorial erkunden wir alles, was Sie benötigen, um binäre Eingaben und Konfigurationsmanagement zu meistern:
- Grundlagen der DIP-Schalter verstehen: Was sie sind, wie sie funktionieren und warum sie für konfigurierbare Elektronik unverzichtbar sind
- DIP-Schalter Varianten: 2-Position, 4-Position, 5-Position, 6-Position, 8-Position und 10-Position Konfigurationen
- Pinout und Anschluss: Die Dual-Row-Pin-Struktur und ordnungsgemäße Arduino-Verkabelung verstehen
- Pull-up-Widerstand Konfiguration: Verwendung der internen Pull-up-Widerstände des Arduino für zuverlässiges Schalter-Auslesen
- Einzelne Schalter auslesen: Programmiertechniken zur Erkennung des AN/AUS-Zustands jeder Schalterposition
- Binäre Kodierung: Umwandlung mehrerer Schalterzustände in einzelne numerische Werte (0-15 für 4-Position, 0-255 für 8-Position)
- Praktische Anwendungen: Geräte-Adressierung, Modus-Auswahl, Konfigurations-Presets und Sicherheits-codes
- Bit-Manipulation: Binäre Darstellung und bitweise Operationen für effiziente Kodierung verstehen
- Prellungs-Überlegungen: Warum DIP-Schalter normalerweise keine Software-Entprellung benötigen
Dieses Arduino Mega DIP-Schalter Projekt ermöglicht unglaubliche Konfigurationsmöglichkeiten! Erstellen Sie Mehrmodus-Roboter mit Verhaltens-Presets, adressierbare I2C-Geräte, Sicherheitssysteme mit physischen Zugangs-codes, konfigurierbare Beleuchtungssteuerungen, Geräte-ID-Selektoren für Mehrstations-Installationen, Betriebsparameter-Selektoren (Geschwindigkeit, Empfindlichkeit, Schwellenwerte), Netzwerk-Knoten-Adressierung, Spiel-Schwierigkeitsgrad-Selektoren und jede Anwendung, die dauerhafte benutzerkonfigurierbare Einstellungen ohne Touchscreens oder komplexe Schnittstellen erfordert.
Erforderliche Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Über DIP-Schalter
Ein DIP-Schalter (Dual In-line Package Switch) ist ein manuelles elektronisches Eingabegerät, das aus mehreren miniaturisierten Kipp- oder Schiebeschaltern besteht, die in einem einzigen kompakten Kunststoffgehäuse untergebracht sind. Diese Schalter sind speziell für Konfiguration, Adressierung und Modus-Auswahl in elektronischen Schaltungen und Geräten entwickelt. Der Name "Dual In-line" bezieht sich auf die zwei parallelen Pin-Reihen, die dem Layout traditioneller integrierter Schaltkreise (ICs) entsprechen und sie mit Breadboards und Standard-Leiterplatten-Montage kompatibel machen.
Hauptanwendungen und Einsatzbereiche:
DIP-Schalter dienen als dauerhafte Konfigurationsschnittstellen in zahlreichen Anwendungen verschiedener Industrien:
- Geräte-Adressierung: Einstellen eindeutiger Adressen für I2C-Slaves, RS485-Knoten, DMX-Geräte oder Netzwerkmodule in Mehrsystem-Installationen
- Kommunikationsprotokoll-Konfiguration: Auswahl von Baudrate, Paritäts-Einstellungen, Datenbits oder Kommunikationsmodi
- Sicherheit und Zugangs-Kontrolle: Erstellen physischer Zugangs-codes oder PIN-Kombinationen für Sicherheitssysteme
- Betriebsmodus-Auswahl: Wählen zwischen verschiedenen Betriebsmodi (manuell/automatisch, normal/debug, Master/Slave)
- Parameter-Konfiguration: Einstellen von Schwellenwerten, Empfindlichkeits-Stufen, Zeit-Verzögerungen oder Spannungsbereichen
- System-Optionen: Aktivieren oder Deaktivieren von Funktionen wie Debug-Ausgabe, Sicherheits-Verriegelungen oder erweiterten Funktionen
- Hardware-Identifikation: Zuweisen von Board-IDs oder Modul-Nummern in modularen Systemen
- Herstellung und Testing: Konfigurieren von Produktions-Testmodi oder Kalibrier-Einstellungen
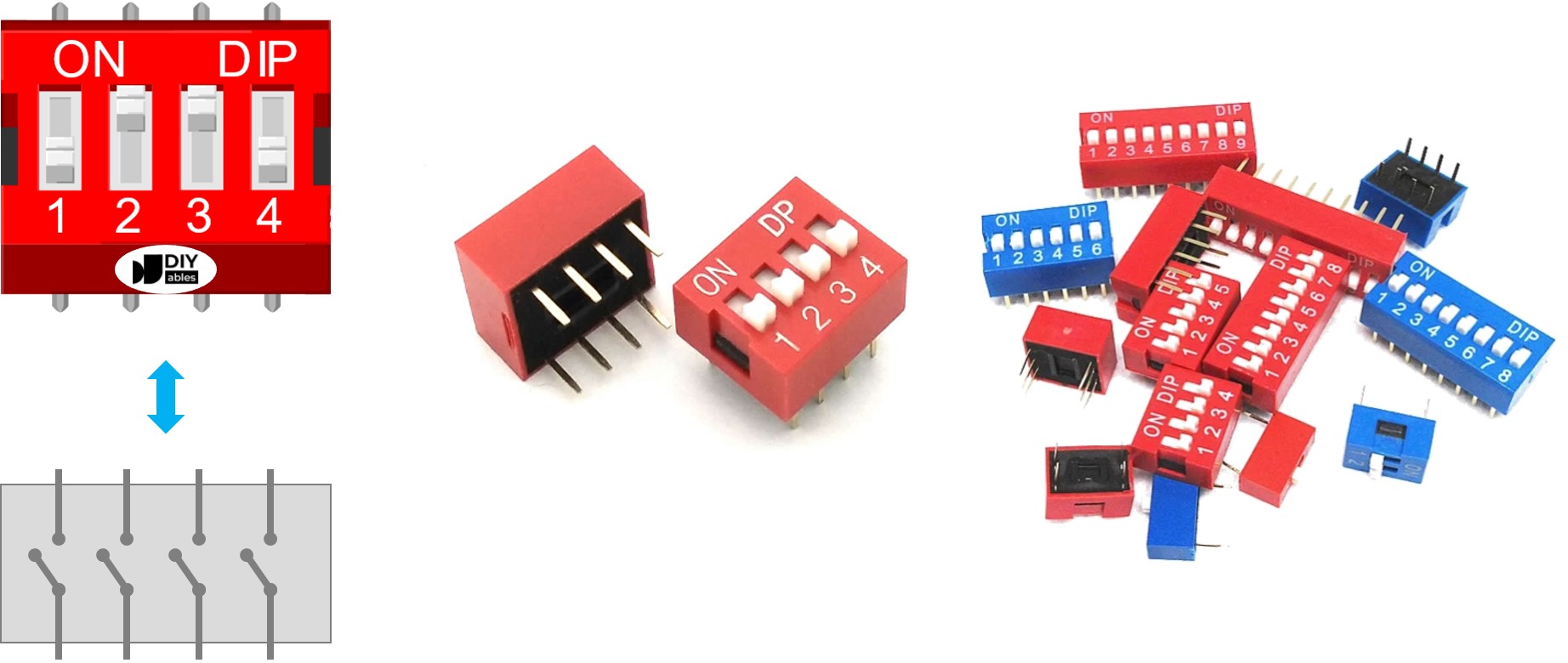
Physische Struktur und Design:
Ein DIP-Schalter besteht aus mehreren unabhängigen Schiebe- oder Kippschaltern, die in ein einziges Gehäuse integriert sind. Wichtige physische Eigenschaften:
- Individuelle Schalter-Positionen: Jeder Schalter repräsentiert ein binäres Bit (AN/AUS, 1/0)
- Gemeinsames Gehäuse: Alle Schalter teilen sich ein einheitliches Kunststoffgehäuse für kompakte Montage
- Dual-Pin-Reihen: Zwei parallele Pin-Reihen für Breadboard- und Leiterplatten-Kompatibilität
- Klare Markierungen: Normalerweise beschriftet mit Positionsnummern (1, 2, 3, 4...) und AN/AUS-Indikatoren
- Mechanische Arretierung: Schalter behalten ihre Position bis zur manuellen Änderung (nicht-momentan)
- Kompakte Größe: Typische Abmessungen von 10-25mm Länge abhängig von der Positions-Anzahl
Verfügbare Positions-Konfigurationen:
DIP-Schalter gibt es in verschiedenen Größen, die jeweils unterschiedliche Kodier-Möglichkeiten bieten:
- 2-Position DIP-Schalter: 2 Bits = 4 mögliche Kombinationen (0-3)
- 4-Position DIP-Schalter: 4 Bits = 16 mögliche Kombinationen (0-15) ← Am häufigsten für Arduino-Projekte
- 5-Position DIP-Schalter: 5 Bits = 32 mögliche Kombinationen (0-31)
- 6-Position DIP-Schalter: 6 Bits = 64 mögliche Kombinationen (0-63)
- 8-Position DIP-Schalter: 8 Bits = 256 mögliche Kombinationen (0-255) ← Standard-Byte-Kodierung
- 10-Position DIP-Schalter: 10 Bits = 1024 mögliche Kombinationen (0-1023)
Grundlagen der binären Kodierung:
Die Kraft der DIP-Schalter liegt in ihrer Fähigkeit, numerische Werte durch binäre Darstellung zu kodieren. Jede Schalterposition repräsentiert ein Bit in einer binären Zahl:
- Position 1 (ganz rechts): Least Significant Bit (LSB) = 2⁰ = 1
- Position 2: 2¹ = 2
- Position 3: 2² = 4
- Position 4 (ganz links): Most Significant Bit (MSB) = 2³ = 8
Wenn Sie Schalter auf AN oder AUS stellen, "schreiben" Sie im Grunde eine binäre Zahl. Zum Beispiel mit einem 4-Position DIP-Schalter:
- AN-AUS-AN-AUS = binär 1010 = dezimal 10
- AN-AN-AN-AN = binär 1111 = dezimal 15
- AUS-AUS-AUS-AUS = binär 0000 = dezimal 0
Diese binäre Kodierung ermöglicht es einem einfachen 4-Schalter-Gerät, 16 verschiedene Werte darzustellen, wodurch DIP-Schalter unglaublich platz-effizient für Konfigurations-Schnittstellen werden.
Vorteile von DIP-Schaltern:
- Keine Programmierung erforderlich: Benutzer können Geräte vor Ort rekonfigurieren ohne Code-Änderungen oder Firmware-Updates
- Nicht-flüchtige Konfiguration: Einstellungen bleiben über Strom-Zyklen und Resets erhalten
- Visuelle Bestätigung: Physische Schalter-Positionen bieten sofortige visuelle Rückmeldung der aktuellen Einstellungen
- Zuverlässiger Betrieb: Mechanische Schalter sind robust und resistent gegen elektrische Störungen
- Niedrige Kosten: Kostengünstige Komponenten geeignet für Produktion und Bastler-Projekte
- Keine zusätzlichen Komponenten: Funktioniert direkt mit Mikrocontroller GPIO-Pins unter Verwendung interner Pull-up-Widerstände
- Industriestandard: Weithin anerkannte Schnittstelle, die Techniker instinktiv verstehen
- Breadboard-kompatibel: Einfache Prototyping mit Standard 0,1" (2,54mm) Pin-Abstand
Pinout
Das Verständnis des DIP-Schalter Pinouts ist wesentlich für ordnungsgemäße Breadboard- und Arduino-Verbindungen. Während die Pin-Anordnung anfangs mit zwei Pin-Reihen verwirrend erscheinen mag, ist die zugrundeliegende Struktur eigentlich ganz einfach, sobald Sie das Paarungs-Konzept verstehen.
Pin-Struktur und Layout:
Ein DIP-Schalter verfügt über zwei parallele Pin-Reihen, die auf gegenüberliegenden Seiten des Komponenten-Gehäuses positioniert sind. Die kritische Beziehung, die Sie verstehen müssen:
- Anzahl Pins pro Reihe = Anzahl Schalter-Positionen
- Gesamt-Pins = 2 × Anzahl Positionen
Zum Beispiel:
- 4-Position DIP-Schalter: 8 Pins gesamt (4 Pins pro Reihe)
- 8-Position DIP-Schalter: 16 Pins gesamt (8 Pins pro Reihe)
- 2-Position DIP-Schalter: 4 Pins gesamt (2 Pins pro Reihe)
Pin-Paarung und Schalter-Zuordnung:
Jeder einzelne Schiebe- oder Kippschalter verbindet genau zwei Pins - einen Pin aus jeder Reihe. Diese gepaarten Pins stehen sich direkt über das Schalter-Gehäuse gegenüber:
Wenn Sie den Schalter von oben betrachten:
- Position 1 Schalter: Verbindet Pins 1A und 1B (erster Pin jeder Reihe)
- Position 2 Schalter: Verbindet Pins 2A und 2B (zweiter Pin jeder Reihe)
- Position 3 Schalter: Verbindet Pins 3A und 3B (dritter Pin jeder Reihe)
- Position 4 Schalter: Verbindet Pins 4A und 4B (vierter Pin jeder Reihe)
Wichtige Pinout-Prinzipien:
- Keine Polarität: Im Gegensatz zu Dioden oder LEDs haben DIP-Schalter keine Polarität. Es spielt keine Rolle, welche Seite mit Arduino und welche mit Masse verbunden wird - der Schalter funktioniert in beiden Orientierungen identisch.
- Austauschbare Pin-Reihen: Sie können jede Reihe mit Ihren Arduino-Eingabe-Pins und die andere Reihe mit Masse verbinden. Die meisten Menschen verbinden die obere Reihe mit Arduino-Pins und die untere Reihe mit Masse, aber umgekehrt funktioniert genauso gut.
- Unabhängige Schalter: Jede Schalter-Position arbeitet völlig unabhängig. Das Schließen (Einschalten) von Position 1 hat keine Auswirkung auf die Positionen 2, 3 oder 4.
- Breadboard-Montage: DIP-Schalter überbrücken die Mitte-Lücke eines Breadboards, mit einer Pin-Reihe auf jeder Seite. Dies verhindert Kurzschlüsse zwischen Pins und bietet einfachen Zugang für Jumper-Kabel-Verbindungen.
Verbindungs-Strategie:
Methode 1 (Empfohlen für Klarheit):
- Verbinden Sie eine komplette Pin-Reihe gemeinsam mit GND (gemeinsame Masse)
- Verbinden Sie jeden Pin der gegenüberliegenden Reihe mit separaten Arduino Digital-Eingabe-Pins
- Aktivieren Sie interne Pull-up-Widerstände in der Software (pinMode(pin, INPUT_PULLUP))
Methode 2 (Alternative):
- Verbinden Sie eine Reihe mit VCC (5V)
- Verbinden Sie andere Reihe mit Arduino-Eingabe-Pins mit externen Pull-down-Widerständen
- Weniger üblich aufgrund externer Widerstands-Anforderung
Pin-Auslesen:
Mit Pull-up-Konfiguration:
- Schalter AN (geschlossen) → Pin mit GND verbunden → Arduino liest LOW
- Schalter AUS (offen) → Pin durch internen Widerstand HIGH gezogen → Arduino liest HIGH
Diese invertierte Logik (AN=LOW, AUS=HIGH) ist wichtig beim Schreiben Ihres Codes!
Praktisches Verkabelungs-Beispiel (4-Position DIP-Schalter):
Verifikations-Tipp:
Falls unsicher, welche Pins gepaart sind, verwenden Sie ein Multimeter im Durchgangs-Modus:
- Stellen Sie einen Schalter auf AN, andere auf AUS
- Testen Sie Pin-Kombinationen bis Sie den Durchgangs-Piep hören
- Das piepende Paar sind die zwei Pins, die von diesem Schalter gesteuert werden
- Wiederholen Sie für verbleibende Schalter, um alle Pin-Paare zu kartieren
Funktionsweise
Das Verständnis der elektrischen Funktionsweise von DIP-Schaltern ist grundlegend für das korrekte Auslesen ihrer Zustände mit Ihrem Arduino Mega. DIP-Schalter sind einfache elektromechanische Geräte, die die elektrische Kontinuität zwischen zwei Pins steuern, aber ihr Verhalten in einer Schaltung erfordert das Verständnis von Pull-up-Widerständen und invertierter Logik.
Grundlegende Schalter-Mechanik:
Jede Position in einem DIP-Schalter ist ein unabhängiger Single Pole Single Throw (SPST) Schalter mit zwei Betriebszuständen:
AN-Position (Geschlossener Stromkreis):
- Der interne Metall-Kontakt überbrückt die zwei Pins
- Elektrische Verbindung ist hergestellt - Strom kann fließen
- Die zwei Pins sind elektrisch verbunden (Durchgang vorhanden)
- Wirkt wie ein Kabel, das die Pins verbindet
- Widerstand zwischen Pins: ~0Ω (praktisch null)
AUS-Position (Offener Stromkreis):
- Der interne Metall-Kontakt trennt sich von einem oder beiden Pins
- Elektrische Verbindung ist unterbrochen - Strom kann nicht fließen
- Die zwei Pins sind elektrisch isoliert (kein Durchgang)
- Wirkt wie ein Luftspalt zwischen Pins
- Widerstand zwischen Pins: ∞Ω (unendlich, keine Verbindung)
Zusammenfassung:
- AN-Position = Stromkreis GESCHLOSSEN = Elektrizität KANN fließen
- AUS-Position = Stromkreis OFFEN = Elektrizität KANN NICHT fließen
Arduino-Schaltungs-Konfiguration:
Um DIP-Schalter-Zustände zuverlässig auszulesen, verwenden wir Arduinos interne Pull-up-Widerstände. Dies ist die Standard- und empfohlene Konfiguration:
Verkabelungs-Setup:
- Verbinden Sie eine Pin-Reihe des DIP-Schalters mit GND (Masse)
- Verbinden Sie die andere Pin-Reihe mit Arduino Digital-Eingabe-Pins
- Aktivieren Sie INPUT_PULLUP Modus im Code: pinMode(pin, INPUT_PULLUP)
Funktionsweise der Pull-Up-Widerstände:
Wenn Sie einen Pin als INPUT_PULLUP konfigurieren, verbindet der Arduino intern einen ~20kΩ Widerstand zwischen dem Pin und VCC (5V). Dieser Widerstand "zieht" die Pin-Spannung HIGH, wenn nichts anderes verbunden ist:
Zustands-Auslese-Logik (Invertierte Logik):
Mit Pull-up-Konfiguration ist die Logik invertiert im Vergleich zu dem, was Sie anfangs erwarten könnten:
Wenn Schalter AN ist (Geschlossen):
- Schalter erstellt direkte Verbindung zwischen Arduino-Pin und GND
- Masse bietet einen Pfad zu 0V (geringerer Widerstand als Pull-up)
- Strom fließt durch Pull-up-Widerstand zur Masse
- Pin-Spannung fällt auf ~0V
- Arduino liest: LOW
- Dies ist kontraintuitiv: AN-Position = LOW-Lesung!
Wenn Schalter AUS ist (Offen):
- Keine Verbindung zwischen Arduino-Pin und GND
- Pull-up-Widerstand hält Pin bei 5V (kein Stromfluss)
- Pin "schwebt" HIGH aufgrund Pull-up-Widerstand
- Arduino liest: HIGH
- Dies ist ebenfalls kontraintuitiv: AUS-Position = HIGH-Lesung!
Zustands-Beziehungs-Tabelle:
Die Tabelle unten fasst die Beziehung zwischen physischer Schalter-Position und Arduino-Lesungen mit Pull-up-Konfiguration zusammen:
| DIP-Schalter Position | Binäre Darstellung | Physischer Schaltungszustand | Elektrische Verbindung | Arduino-Pin-Zustand | digitalRead() Wert |
|---|---|---|---|---|---|
| AN | 1 | GESCHLOSSEN | Pin mit GND verbunden | LOW | 0 |
| AUS | 0 | OFFEN | Pin zu 5V gezogen | HIGH | 1 |
Wichtige Logik-Invertierung:
Beachten Sie die Invertierung:
- AN-Schalter → Binär 1 → Arduino liest LOW (0)
- AUS-Schalter → Binär 0 → Arduino liest HIGH (1)
Bei der Kodierung binärer Zahlen müssen Sie die Lesungen in der Software invertieren:
Warum Pull-Up-Konfiguration verwenden?
- Keine externen Komponenten: Arduinos interne Pull-ups eliminieren Bedarf für externe Widerstände
- Standard-Praxis: Industrie-Standard-Konfiguration für Schalter und Taster
- Zuverlässig: Verhindert "schwebende" Eingänge, die zufällige Werte lesen könnten
- Schutz: Begrenzt Strom wenn Schalter schließt (Widerstand verhindert Kurzschluss)
Alternative: Pull-Down-Konfiguration (Nicht empfohlen):
Sie könnten theoretisch externe Pull-down-Widerstände verwenden (Verbindung zu GND statt VCC), was nicht-invertierte Logik gäbe (AN=HIGH, AUS=LOW). Dies erfordert jedoch externe Komponenten, da Arduino keine internen Pull-down-Widerstände hat, wodurch es weniger praktisch wird.
Praktisches Beispiel (4-Position DIP-Schalter):
In den folgenden Abschnitten verwenden wir einen 4-Position DIP-Schalter als Arbeitsbeispiel. Die Prinzipien gelten jedoch universell für alle DIP-Schalter-Größen:
- 2-Position Schalter (2 Bits = 0-3 Bereich)
- 5-Position Schalter (5 Bits = 0-31 Bereich)
- 6-Position Schalter (6 Bits = 0-63 Bereich)
- 8-Position Schalter (8 Bits = 0-255 Bereich)
- 10-Position Schalter (10 Bits = 0-1023 Bereich)
Der Code skaliert natürlich - fügen Sie einfach mehr Pins hinzu, um mehr Schalter-Positionen zu lesen!
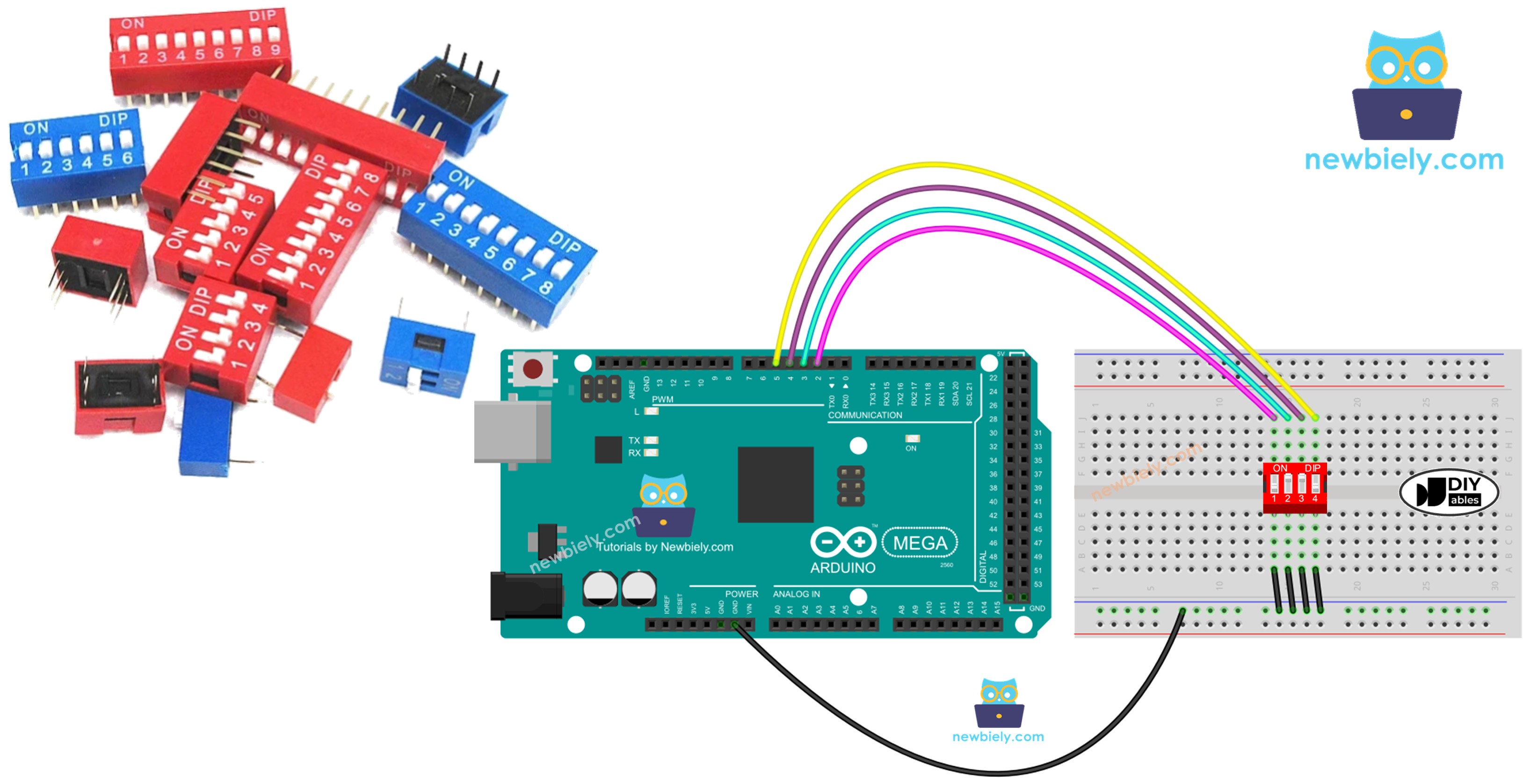
Schaltplan
Das Verbinden eines DIP-Schalters mit Ihrem Arduino Mega ist dank des breadboard-freundlichen Designs der Komponente unkompliziert. Diese Verkabelungs-Konfiguration verwendet Arduinos interne Pull-up-Widerstände und eliminiert damit den Bedarf für externe Komponenten außer Jumper-Kabeln.
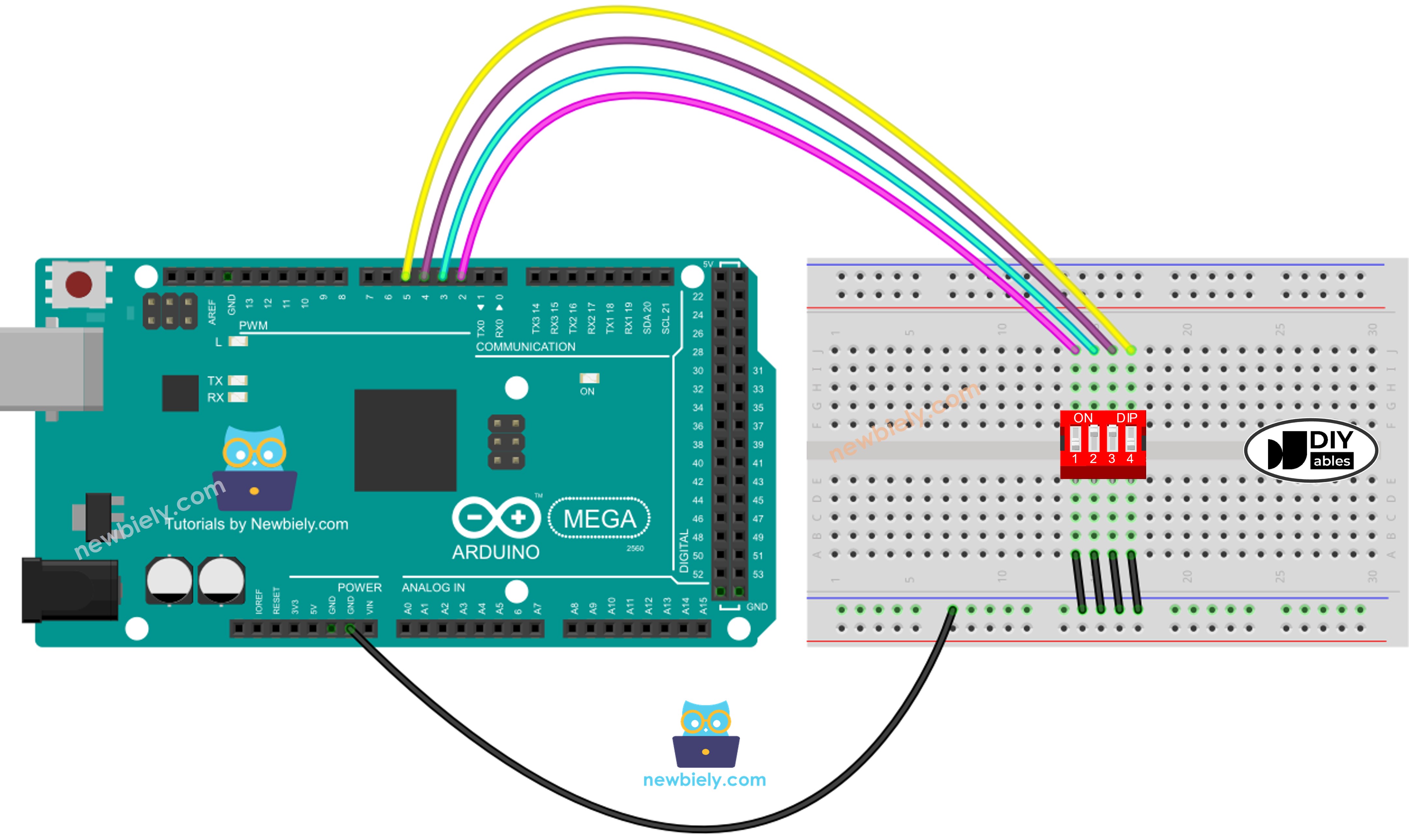
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
Verkabelungs-Konfiguration erklärt:
Das Diagramm oben zeigt die empfohlene Verbindungsmethode für einen 4-Position DIP-Schalter:
Masse-Verbindung (Gemeinsame Schiene):
- Verbinden Sie eine komplette Pin-Reihe des DIP-Schalters mit der Masse-Schiene des Breadboards (blaue/negative Schiene)
- Die Masse-Schiene verbindet sich mit dem Arduino Mega GND Pin
- Dies bietet eine gemeinsame Masse-Referenz für alle vier Schalter-Positionen
- Alle vier Schalter teilen diese einzelne Masse-Verbindung
Arduino-Pin-Verbindungen (Einzelne Signale):
- Verbinden Sie jeden Pin der gegenüberliegenden Reihe mit separaten Arduino Digital-Pins
- Typische Pin-Zuordnung für 4-Position DIP-Schalter:
- Position 1 → Arduino Mega Pin 2 (LSB - Least Significant Bit)
- Position 2 → Arduino Mega Pin 3
- Position 3 → Arduino Mega Pin 4
- Position 4 → Arduino Mega Pin 5 (MSB - Most Significant Bit)
- Mitte-Spalt überbrücken: Positionieren Sie den DIP-Schalter so, dass er den Mitte-Trennkanal des Breadboards überbrückt
- Pin-Reihen-Trennung: Eine Pin-Reihe verbindet sich mit Löchern auf der linken Seite, die andere mit der rechten Seite
- Kurzschlüsse verhindern: Diese Anordnung stellt sicher, dass die zwei Pin-Reihen nicht versehentlich zusammen verbunden werden
- Einfacher Zugang: Beide Pin-Reihen sind für Jumper-Kabel-Verbindungen zugänglich
- DIP-Schalter in Breadboard einsetzen und dabei den Mitte-Spalt überbrücken
- Jumper-Kabel verwenden, um eine komplette Pin-Reihe mit Breadboard-Masse-Schiene zu verbinden
- Breadboard-Masse-Schiene mit Arduino Mega GND mit Jumper-Kabel verbinden
- Einzelne Pins der gegenüberliegenden Reihe mit Arduino Digital-Pins 2, 3, 4, 5 verbinden
- Alle Verbindungen auf Festigkeit prüfen und sicherstellen, dass Pins nicht verbogen sind
- Pins 2-53: Jeder Digital-Pin funktioniert (Mega hat 54 Digital I/O Pins!)
- Sequenzielle Zuordnung: Aufeinanderfolgende Pins (2,3,4,5) machen Code lesbarer
- Konflikte vermeiden: Verwenden Sie keine Pins, die bereits anderen Komponenten zugeordnet sind (Serial, SPI, I2C)
- Wenn Schalter AN ist: Pin verbindet sich direkt mit GND → liest LOW
- Wenn Schalter AUS ist: Interner Pull-up-Widerstand hält Pin HIGH
- Keine schwebenden Eingänge: Pin hat immer einen definierten Spannungspegel (entweder 0V oder 5V)
- Keine externen Widerstände benötigt: Arduinos interne ~20kΩ Pull-ups erledigen alles
- 2-Position Schalter: Verbinden mit 2 Arduino-Pins (z.B. Pins 2-3)
- 6-Position Schalter: Verbinden mit 6 Arduino-Pins (z.B. Pins 2-7)
- 8-Position Schalter: Verbinden mit 8 Arduino-Pins (z.B. Pins 2-9)
- 10-Position Schalter: Verbinden mit 10 Arduino-Pins (z.B. Pins 2-11)
- Ablesungen erscheinen zufällig/instabil: Überprüfen Sie, dass INPUT_PULLUP im Code aktiviert ist
- Alle Schalter lesen dasselbe: Pin-Reihen können versehentlich zusammen kurzgeschlossen sein
- Keine Ablesungen ändern sich: Überprüfen Sie Masseverbindung und Arduino Pin-Zuordnungen
- Invertierte Ablesungen: Dies ist normal bei Pull-up-Konfiguration (AN=LOW, AUS=HIGH)
Breadboard-Platzierung:
Verbindungs-Reihenfolge (Schritt-für-Schritt):
Pin-Auswahl-Flexibilität:
Sie sind nicht auf Pins 2-5 beschränkt! Der DIP-Schalter kann mit beliebigen Digital-Pins des Arduino Mega verbunden werden:
Denken Sie daran, die Pin-Definitionen in Ihrem Code zu aktualisieren, damit sie zu Ihrer physischen Verkabelung passen:
Warum diese Konfiguration funktioniert:
Diese Verkabelungs-Konfiguration erstellt eine zuverlässige digitale Eingangsschaltung:
Skalierung auf verschiedene DIP-Schalter-Größen:
Das gleiche Verkabelungs-Prinzip gilt für alle DIP-Schalter-Konfigurationen:
Verbinden Sie immer eine komplette Reihe mit GND und die gegenüberliegenden Reihen-Pins einzeln mit Arduino Digital-Eingängen.
Fehlersuche bei Verkabelungs-Problemen:
Arduino Mega Code - DIP-Schalter
Das Programmieren des Arduino Mega zum Auslesen von DIP-Schalter-Zuständen umfasst zwei verschiedene Ansätze, von denen jeder für verschiedene Anwendungen geeignet ist. Das Verständnis beider Methoden gibt Ihnen Flexibilität bei der Verwendung von DIP-Schaltern in Ihren Projekten.
Zwei Programmier-Ansätze:
Ansatz 1: Individuelles Schalter-Zustands-Auslesen
- Lesen Sie jede Schalterposition unabhängig als separaten booleschen Wert (AN/AUS, wahr/falsch)
- Am besten für: Modus-Auswahl, Funktions-Aktivierungsflags, unabhängige Options-Umschalter
- Beispiel-Anwendungen: Debug-Modus aktivieren, Betriebsmodus auswählen, individuelle Funktionen konfigurieren
- Gibt zurück: Vier separate boolesche Werte (oder HIGH/LOW-Zustände)
Ansatz 2: Binäre Kodierung zu numerischem Wert
- Kombinieren Sie alle Schalter-Zustände zu einer einzelnen binären Zahl und konvertieren Sie dann zu Dezimal
- Am besten für: Geräte-Adressierung, Konfigurations-Presets, numerische Parameter-Auswahl
- Beispiel-Anwendungen: I2C Slave-Adresse (0-127), Preset-Auswahl (1-16), Zugangs-codes
- Gibt zurück: Einzelner Ganzzahl-Wert (0-15 für 4-Position Schalter)
Welchen Ansatz sollten Sie verwenden?
- Verwenden Sie Individuelles Auslesen wenn: Jeder Schalter eine separate, unabhängige Funktion steuert
- Verwenden Sie Binäre Kodierung wenn: Sie numerische Werte darstellen oder aus mehreren Optionen auswählen müssen
Lassen Sie uns beide Ansätze mit vollständigen, funktionierenden Code-Beispielen erkunden.
Arduino Mega Code - Lesen des AN/AUS-Zustands des DIP-Schalters
Schnelle Schritte
Folgen Sie diesen detaillierten Schritt-für-Schritt-Anweisungen, um individuelle DIP-Schalter-Zustände mit Ihrem Arduino Mega zu lesen:
1. Hardware-Aufbau: Verbinden Sie den DIP-Schalter mit Ihrem Arduino Mega gemäß dem oben gezeigten Schaltplan. Stellen Sie sicher, dass eine Pin-Reihe mit GND (Masse) verbunden ist und die gegenüberliegende Reihe mit Arduino Digital-Pins 2, 3, 4 und 5. Überprüfen Sie, dass der DIP-Schalter den Breadboard-Mitte-Spalt ordnungsgemäß überbrückt.
2. Anfangliche Schalter-Position: Bevor Sie Strom anschließen, setzen Sie alle DIP-Schalter in die AUS-Position. Dies bietet einen bekannten Ausgangszustand für Tests.
3. USB-Verbindung: Schließen Sie den Arduino Mega mit einem USB-Kabel an Ihren Computer an. Warten Sie, bis Ihr Betriebssystem das Board erkennt.
4. Arduino IDE öffnen: Starten Sie die Arduino IDE Software auf Ihrem Computer. Stellen Sie sicher, dass Sie die neueste Version für beste Kompatibilität haben.
5. Board-Auswahl: Navigieren Sie zu Tools → Board und wählen Sie "Arduino Mega or Mega 2560" aus der Board-Liste.
6. Port-Auswahl: Gehen Sie zu Tools → Port und wählen Sie den COM-Port (Windows) oder /dev/ttyUSB oder /dev/ttyACM-Port (Mac/Linux) entsprechend Ihrem Arduino Mega.
7. Code kopieren und einfügen: Kopieren Sie den vollständigen Arduino-Code aus dem Abschnitt "Arduino Mega Code - Lesen des AN/AUS-Zustands des DIP-Schalters" oben und fügen Sie ihn in einen neuen Arduino IDE Sketch ein.
8. Verbindungen überprüfen: Überprüfen Sie vor dem Hochladen im Code, dass die Pin-Nummern (DIP_PIN_1 bis DIP_PIN_4) mit Ihrer physischen Verkabelung übereinstimmen. Falls Sie andere Pins verwendet haben, aktualisieren Sie die Konstanten am Anfang des Codes.
9. Code hochladen: Klicken Sie auf die Upload-Schaltfläche (Pfeil nach rechts Symbol) in der Arduino IDE Toolbar, um den Code zu kompilieren und auf Ihren Arduino Mega hochzuladen. Warten Sie auf die Meldung "Done uploading".
10. Seriellen Monitor öffnen: Klicken Sie auf das Serieller Monitor-Symbol (Lupe) in der oberen rechten Ecke der Arduino IDE oder drücken Sie Strg+Umschalt+M (Windows/Linux) oder Cmd+Umschalt+M (Mac).
11. Baudrate einstellen: Stellen Sie im Seriellen Monitor-Fenster sicher, dass das Baudrate-Dropdown (unten rechts) auf 9600 eingestellt ist, um mit der Serial.begin(9600)-Einstellung des Codes übereinzustimmen.
12. Schalter-Position 1 testen: Schieben Sie den ersten DIP-Schalter (Position 1) in die AN-Position. Beobachten Sie die Serielle Monitor-Ausgabe - sie sollte jetzt "position 1: ON" anzeigen, während andere Positionen "OFF" bleiben.
13. Restliche Positionen testen: Schieben Sie nacheinander jeden verbleibenden Schalter (Positionen 2, 3, 4) in die AN-Position und beobachten Sie, wie die Serielle Monitor-Ausgabe in Echtzeit aktualisiert wird.
14. Ausgabe überprüfen: Während Sie jeden Schalter umschalten, sollte der Serielle Monitor den aktuellen Zustand aller vier Schalter anzeigen, aktualisiert alle 500 Millisekunden. Das Ausgabe-Format zeigt klar, welche Schalter AN und welche AUS sind.
Erwartete Serielle Monitor-Ausgabe:
Wenn Sie jeden Schalter nacheinander einschalten, sollten Sie eine Ausgabe ähnlich dieser sehen:
Die Ausgabe verstehen:
- Leere Zeile: Trennt jede Ablesung zur Klarheit
- "position X: ON": Schalter X ist in der AN-Position (geschlossener Stromkreis, Pin liest LOW)
- "position X: OFF": Schalter X ist in der AUS-Position (offener Stromkreis, Pin liest HIGH)
- Echtzeit-Updates: Ausgabe wird alle 500ms aktualisiert und zeigt aktuelle Schalter-Zustände
Fehlersuche:
- Keine Serielle Monitor-Ausgabe: Überprüfen Sie, dass die Baudrate auf 9600 eingestellt ist
- Invertierte Ablesungen (AN zeigt AUS): Überprüfen Sie, dass INPUT_PULLUP in pinMode() verwendet wird
- Ablesungen ändern sich nicht: Überprüfen Sie DIP-Schalter-Verbindungen und Masse-Kabel
- Zufällige/instabile Ablesungen: Stellen Sie sicher, dass Pull-up-Widerstände aktiviert sind (INPUT_PULLUP Modus)
Arduino Mega Code - Kodierung der DIP-Schalter-Zustände in eine Zahl
Schnelle Schritte
Folgen Sie diesen umfassenden Schritt-für-Schritt-Anweisungen, um DIP-Schalter-Zustände als kodierte numerische Werte zu lesen:
1. Verkabelung überprüfen: Stellen Sie sicher, dass Ihr DIP-Schalter noch korrekt aus dem vorherigen Beispiel verkabelt ist (eine Pin-Reihe zu GND, gegenüberliegende Reihe zu Arduino-Pins 2-5). Die Verkabelung bleibt für die Binär-Kodierung identisch.
2. Alle Schalter zurücksetzen: Setzen Sie alle vier DIP-Schalter vor Beginn in die AUS-Position. Dies repräsentiert binär 0000 = dezimal 0.
3. USB-Verbindung: Verbinden Sie den Arduino Mega mit einem USB-Kabel mit Ihrem Computer, falls noch nicht verbunden.
4. Arduino IDE öffnen: Starten Sie die Arduino IDE Software.
5. Board und Port-Auswahl: Überprüfen Sie, dass Tools → Board "Arduino Mega or Mega 2560" zeigt und Tools → Port den korrekten COM-Port zeigt.
6. Neuen Code laden: Kopieren Sie den vollständigen Code aus dem Abschnitt "Arduino Mega Code - Kodierung der DIP-Schalter-Zustände in eine Zahl" oben. Fügen Sie ihn in einen neuen Sketch ein oder ersetzen Sie den vorherigen Code.
7. Die Kodierung verstehen: Dieser Code behandelt die vier Schalter als 4-Bit-Binärzahl:
- Position 1 (ganz rechts) = Bit 0 = Wert 1 (2⁰)
- Position 2 = Bit 1 = Wert 2 (2¹)
- Position 3 = Bit 2 = Wert 4 (2²)
- Position 4 (ganz links) = Bit 3 = Wert 8 (2³)
8. Code hochladen: Klicken Sie auf die Upload-Schaltfläche, um den Code zu kompilieren und auf Ihren Arduino Mega zu übertragen.
9. Seriellen Monitor öffnen: Öffnen Sie den Seriellen Monitor (Tools → Serieller Monitor oder Strg+Umschalt+M).
10. Baudrate überprüfen: Stellen Sie sicher, dass die Baudrate des Seriellen Monitors auf 9600 eingestellt ist.
11. Startwert testen: Mit allen Schaltern AUS sollte der Serielle Monitor anzeigen:
Dies ist binär 0000, was dezimal 0 entspricht.
12. Jede Bit-Position testen: Testen Sie systematisch jedes Bit, indem Sie jeweils einen Schalter einschalten:
- Nur Position 1 AN → Sollte zeigen: encoded state: 1 (binär 0001)
- Nur Position 2 AN → Sollte zeigen: encoded state: 2 (binär 0010)
- Nur Position 3 AN → Sollte zeigen: encoded state: 4 (binär 0100)
- Nur Position 4 AN → Sollte zeigen: encoded state: 8 (binär 1000)
13. Kombinationen testen: Testen Sie jetzt Kombinationen, indem Sie mehrere Schalter einschalten:
- Positionen 1 + 2 AN → encoded state: 3 (binär 0011 = 1+2)
- Positionen 1 + 3 AN → encoded state: 5 (binär 0101 = 1+4)
- Positionen 2 + 3 AN → encoded state: 6 (binär 0110 = 2+4)
14. Maximalwert testen: Alle vier Schalter in AN-Position stellen → Sollte zeigen: encoded state: 15 (binär 1111 = 8+4+2+1)
15. Frei experimentieren: Probieren Sie verschiedene Schalter-Kombinationen aus und überprüfen Sie, dass der kodierte Dezimalwert mit der binären Darstellung übereinstimmt.
Erwartete Serielle Monitor-Ausgabe-Sequenz:
Wenn Sie systematisch alle 16 möglichen Kombinationen (0-15) testen, könnten Sie sehen:
Die Binäre Kodierung verstehen:
Der numerische Wert ändert sich basierend darauf, welche Schalter AN (1) oder AUS (0) sind. Jeder Schalter trägt seinen Positionswert bei, wenn er eingeschaltet wird:
Vollständige 4-Position DIP-Schalter Wahrheitstabelle:
Die Tabelle unten zeigt alle 16 möglichen Kombinationen und ihre Dezimal-Äquivalente:
| Position 1 | Position 2 | Position 3 | Position 4 | Binärer Wert | Dezimalwert | Berechnung |
|---|---|---|---|---|---|---|
| AUS | AUS | AUS | AUS | 0000 | 0 | 0+0+0+0 |
| AN | AUS | AUS | AUS | 0001 | 1 | 1+0+0+0 |
| AUS | AN | AUS | AUS | 0010 | 2 | 0+2+0+0 |
| AN | AN | AUS | AUS | 0011 | 3 | 1+2+0+0 |
| AUS | AUS | AN | AUS | 0100 | 4 | 0+0+4+0 |
| AN | AUS | AN | AUS | 0101 | 5 | 1+0+4+0 |
| AUS | AN | AN | AUS | 0110 | 6 | 0+2+4+0 |
| AN | AN | AN | AUS | 0111 | 7 | 1+2+4+0 |
| AUS | AUS | AUS | AN | 1000 | 8 | 0+0+0+8 |
| AN | AUS | AUS | AN | 1001 | 9 | 1+0+0+8 |
| AUS | AN | AUS | AN | 1010 | 10 | 0+2+0+8 |
| AN | AN | AUS | AN | 1011 | 11 | 1+2+0+8 |
| AUS | AUS | AN | AN | 1100 | 12 | 0+0+4+8 |
| AN | AUS | AN | AN | 1101 | 13 | 1+0+4+8 |
| AUS | AN | AN | AN | 1110 | 14 | 0+2+4+8 |
| AN | AN | AN | AN | 1111 | 15 | 1+2+4+8 |
Praktische Anwendungen:
Diese Binär-Kodierungs-Technik ermöglicht zahlreiche praktische Anwendungen:
- Geräte-Adressierung: Eindeutige I2C Slave-Adressen setzen (0-127 mit 8-Position Schalter)
- Konfigurations-Presets: Aus 16 vordefinierten Betriebsmodi auswählen
- Zugangs-codes: Physische Sicherheits-codes erstellen (1-15, mit 0 als "gesperrt")
- Menü-Auswahl: Aus 16 Menüoptionen ohne Touchscreen wählen
- Parameter-Auswahl: Aus voreingestellten Werten wählen (Geschwindigkeiten, Temperaturen, Schwellenwerte)
- Mehrsystem-Netzwerke: Eindeutige Knoten-IDs in RS485 oder CAN-Bus-Systemen zuweisen
Die Code-Logik verstehen:
Der Kodierungs-Code verwendet Bit-Verschiebung, um Schalter-Zustände in Dezimal zu konvertieren:
Dies verschiebt jedes Bit an seine richtige Position und kombiniert sie mit bitweisem OR:
- State1 bleibt an Bit-Position 0 (multipliziert mit 1)
- State2 verschiebt sich zu Bit-Position 1 (multipliziert mit 2)
- State3 verschiebt sich zu Bit-Position 2 (multipliziert mit 4)
- State4 verschiebt sich zu Bit-Position 3 (multipliziert mit 8)
Fehlersuche:
- Werte erscheinen invertiert: Überprüfen Sie, dass der Code die Logik invertiert (!digitalRead), um LOW=1, HIGH=0 zu konvertieren
- Falsche Werte angezeigt: Überprüfen Sie Pin-Zuordnungen auf Übereinstimmung mit Verkabelung
- Werte ändern sich nicht: Überprüfen Sie Schalter-Verbindungen und Masse-Kabel
- Unerwartete Zahlen: Stellen Sie sicher, dass INPUT_PULLUP Modus für alle Pins aktiviert ist
Video Tutorial
Wir erwägen die Erstellung von Video-Tutorials. Wenn Sie Video-Tutorials für wichtig halten, abonnieren Sie bitte unseren YouTube-Kanal , um uns zu motivieren, die Videos zu erstellen.