Arduino Mega - Joystick
Willkommen zu diesem umfassenden Arduino Mega Joystick-Tutorial! In dieser detaillierten Arduino Mega Joystick-Anleitung werden Sie entdecken, wie Sie die Kraft analoger Joystick-Module nutzen können, um intuitive, interaktive Steuerungssysteme für Ihre Arduino Mega-Projekte zu erstellen.
Joystick-Module sind unglaublich vielseitige Eingabegeräte, die präzise zweidimensionale Positionssteuerung bieten und sich perfekt für Gaming-Anwendungen, Robotik-Steuerung, Kamera-Pan-Tilt-Systeme und interaktive Kunstinstallationen eignen. In diesem Arduino Mega Joystick-Tutorial erkunden wir alles, was Sie zur Meisterung der Joystick-Integration benötigen:
- Verstehen, was ein Joystick-Modul macht und die Prinzipien hinter seiner Funktionsweise
- Schritt-für-Schritt-Anleitungen für die ordnungsgemäße Verbindung eines Joysticks mit Ihrem Arduino Mega-Mikrocontroller
- Programmiertechniken zum Lesen und Verarbeiten analoger Joystick-Daten von X- und Y-Achsen
- Methoden zur Umwandlung roher Joystick-Daten in sinnvolle Aktionen wie Richtungsbefehle, Cursor-Positionen oder Motor-Steuersignale
- Arbeiten mit der integrierten Push-Button-Funktionalität für zusätzliche Eingabeoptionen
Dieses Arduino Mega Joystick-Projekt eröffnet endlose kreative Möglichkeiten! Bauen Sie Game-Controller, ferngesteuerte Roboter mit intuitiver Lenkung, Pan-Tilt-Kamera-Systeme, Virtual-Reality-Schnittstellen oder interaktive Displays, die auf Joystick-Bewegungen reagieren. Die Kombination aus präziser analoger Steuerung und digitaler Button-Eingabe macht Joysticks zu einem der leistungsstärksten und benutzerfreundlichsten verfügbaren Eingabegeräte!
Benötigte Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Über den Joystick
Joysticks sind vertraute Eingabegeräte, denen Sie wahrscheinlich in vielen Anwendungen begegnet sind - von klassischen Videospiel-Controllern und RC-Spielzeug-Fernbedienungen bis hin zu professioneller Ausrüstung wie Industriemaschinen, Baggern und Drohnen-Steuerungssystemen. Ihre intuitive Bedienoberfläche macht sie zu einer natürlichen Wahl für jedes Projekt, das Richtungssteuerung erfordert.
Das Joystick-Modul besteht aus zwei Potentiometern (variable Widerstände), die senkrecht zueinander unter einem federbelasteten Stick montiert sind, plus einem integrierten Push-Button-Schalter, der aktiviert wird, wenn Sie den Stick nach unten drücken. Diese clevere mechanische Anordnung bietet drei unterschiedliche Ausgänge:
- X-Achsen-Ausgang: Eine analoge Ablesung von 0 bis 1023, die die Links-Rechts-Position (horizontale Bewegung) darstellt
- Y-Achsen-Ausgang: Eine analoge Ablesung von 0 bis 1023, die die Auf-Ab-Position (vertikale Bewegung) darstellt
- Button-Status: Ein digitales Signal (HIGH oder LOW), das anzeigt, ob der Joystick nach unten gedrückt wird
Wenn Sie die beiden analogen Werte kombinieren, erstellen sie präzise 2D-Koordinaten, die die Position des Joysticks im Raum abbilden. In Ruhestellung (neutrale Position) gibt der Joystick typischerweise mittlere Werte um 512 für sowohl X- als auch Y-Achsen aus. Das Bewegen des Sticks in jede Richtung verändert diese Werte proportional und bietet sanfte, kontinuierliche Steuerung.
Die Schönheit dieses Designs liegt in seiner Flexibilität - einige Anwendungen nutzen alle drei Ausgänge gleichzeitig (wie ein Gaming-Controller mit Bewegung und Action-Buttons), während andere möglicherweise nur die X/Y-Positionsdaten benötigen (wie ein Kamera-Pan-Tilt-System) oder nur den Button (als einfacher Schalter). Sie können die genaue Koordinaten-Zuordnung einfach bestimmen, indem Sie Test-Code ausführen, was wir im Programmierabschnitt unten im Detail erkunden werden.
Pinout
Das Verstehen der Pin-Konfiguration des Joysticks ist für die ordnungsgemäße Verkabelung unerlässlich. Das Joystick-Modul verfügt über fünf Pins, die Stromversorgung, Masse und Signalverbindungen bereitstellen:
- GND-Pin: Der Masse-Referenz-Pin. Verbinden Sie diesen mit dem GND (0V) des Arduino Mega, um alle elektrischen Schaltkreise zu vervollständigen und eine gemeinsame Masse-Referenz zu etablieren.
- VCC-Pin: Der Stromversorgungs-Pin. Verbinden Sie diesen mit dem 5V-Ausgang des Arduino Mega, um Betriebsspannung für die Potentiometer und interne Schaltkreise bereitzustellen.
- VRX-Pin: Der X-Achsen-analoge Ausgangs-Pin. Dieser liefert ein analoges Spannungssignal (0V bis 5V), das die horizontale Position des Joysticks darstellt. Verbinden Sie mit einem beliebigen analogen Eingangs-Pin des Arduino Mega (A0-A15).
- VRY-Pin: Der Y-Achsen-analoge Ausgangs-Pin. Dieser liefert ein analoges Spannungssignal (0V bis 5V), das die vertikale Position des Joysticks darstellt. Verbinden Sie mit einem beliebigen analogen Eingangs-Pin des Arduino Mega (A0-A15).
- SW-Pin: Der Schalter-(Button)-Ausgangs-Pin vom integrierten Push-Button. Dieser Pin ist normalerweise offen (keine Verbindung). Das Modul enthält typischerweise einen internen Pull-up-Widerstand, der diesen Pin HIGH (5V) hält, wenn er nicht gedrückt wird, und ihn LOW (0V) zieht, wenn der Joystick nach unten gedrückt wird. Verbinden Sie mit einem beliebigen digitalen Eingangs-Pin des Arduino Mega.

Verbindungs-Tipp: Sie können VRX und VRY mit beliebigen verfügbaren analogen Pins Ihres Arduino Mega verbinden. Der Arduino Mega bietet 16 analoge Eingangs-Pins (A0 bis A15), was Ihnen viele Optionen für die Integration mehrerer Sensoren neben Ihrem Joystick gibt.
Wie es funktioniert
Lassen Sie uns in die technischen Details eintauchen, wie der Joystick physische Bewegung in elektrische Signale umwandelt, die Ihr Arduino verstehen kann:
Links/Rechts-Bewegung (X-Achse):
- Wenn Sie den Joystick nach links oder rechts bewegen, drehen Sie physisch das X-Achsen-Potentiometer im Modul
- Das Bewegen des Sticks vollständig nach links dreht das Potentiometer in seine minimale Widerstandsposition und erzeugt etwa 0V am VRX-Pin
- Das Bewegen des Sticks vollständig nach rechts dreht das Potentiometer in seine maximale Widerstandsposition und erzeugt etwa 5V am VRX-Pin
- Der Analog-Digital-Wandler (ADC) des Arduino Mega liest diese Spannung und wandelt sie in einen digitalen Wert von 0 bis 1023 um, wobei 0V gleich 0 und 5V gleich 1023 entspricht
- In der Mittelposition (neutral) beträgt die Spannung etwa 2,5V, was sich in einen Wert um 512 übersetzt
Auf/Ab-Bewegung (Y-Achse):
- Die Y-Achse funktioniert identisch zur X-Achse, reagiert aber auf vertikale Bewegung anstatt horizontale
- Das Bewegen des Sticks vollständig nach oben erzeugt etwa 0V am VRY-Pin (analoger Wert nahe 0)
- Das Bewegen des Sticks vollständig nach unten erzeugt etwa 5V am VRY-Pin (analoger Wert nahe 1023)
- Der Arduino wandelt diese Spannung mit dem gleichen ADC-Prozess in eine Zahl von 0 bis 1023 um
- Die Mittelposition ergibt etwa 2,5V (analoger Wert um 512)
Kombinierte Bewegungen (Diagonal):
- Wenn Sie den Joystick diagonal bewegen (zum Beispiel oben-rechts oder unten-links), ändern sowohl der VRX- als auch der VRY-Pin gleichzeitig ihre Spannungen
- Jede Achse arbeitet unabhängig, sodass Sie einzigartige Koordinatenpaare für jede Joystick-Position erhalten
- Zum Beispiel könnte das Bewegen zur oberen rechten Ecke Ihnen X=1023, Y=0 geben, während die untere linke Ecke X=0, Y=1023 ergibt
- Dies schafft eine glatte, kontinuierliche Zuordnung des gesamten 2D-Bewegungsbereichs
Drücken des Joysticks (Z-Achse / Button):
- Das Drücken direkt nach unten auf die Oberseite des Joysticks aktiviert einen taktilen Push-Button-Schalter unter dem Stick
- Der SW-Pin enthält einen internen Pull-up-Widerstand (oder Sie können den internen Pull-up des Arduino aktivieren)
- Wenn nicht gedrückt, hält der Pull-up-Widerstand den SW-Pin auf HIGH-Spannung (5V)
- Wenn gedrückt, verbindet der Button den SW-Pin direkt mit der Masse und zieht ihn LOW (0V)
- Der Arduino liest dies als einfaches digitales Signal: HIGH = nicht gedrückt, LOW = gedrückt
Zusammenfassung: Der Joystick ist im Wesentlichen zwei variable Widerstände (Potentiometer) plus ein Button. Das Bewegen des Sticks ändert Widerstandswerte, was die Spannungen an VRX und VRY ändert. Die analogen Eingänge des Arduino messen diese Spannungen als Zahlen von 0 bis 1023 und geben Ihnen präzise Positionsdaten. Der Button bietet einen zusätzlichen digitalen Eingang, der entweder HIGH oder LOW ist, perfekt zum Auslösen von Aktionen, wenn der Benutzer den Joystick nach unten drückt.
Schaltplan
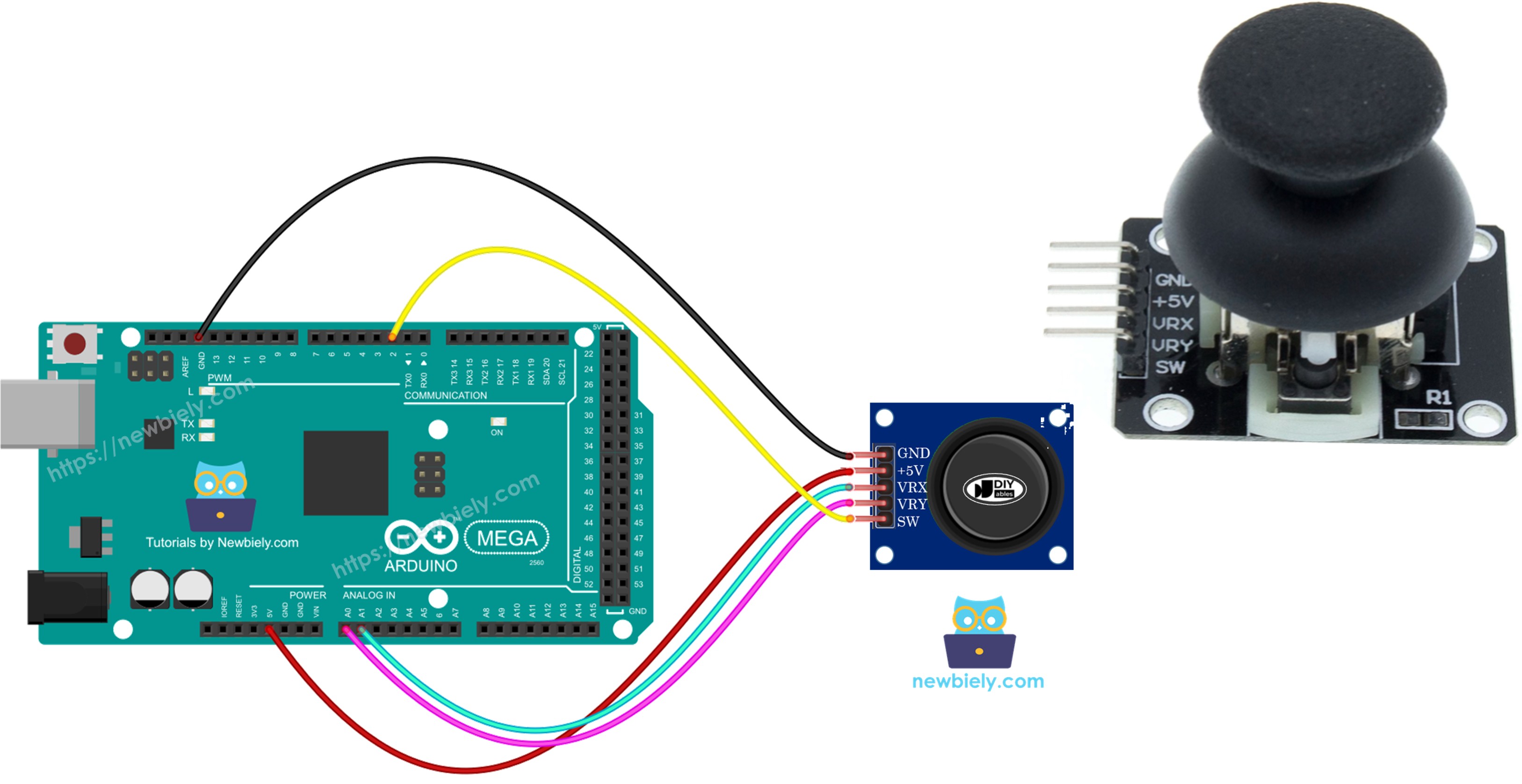
Lassen Sie uns nun die ordnungsgemäßen Verbindungen zwischen Ihrem Arduino Mega und dem Joystick-Modul betrachten. Diese Konfiguration verwendet zwei analoge Pins für die Positionserkennung und einen digitalen Pin für die Button-Erkennung:
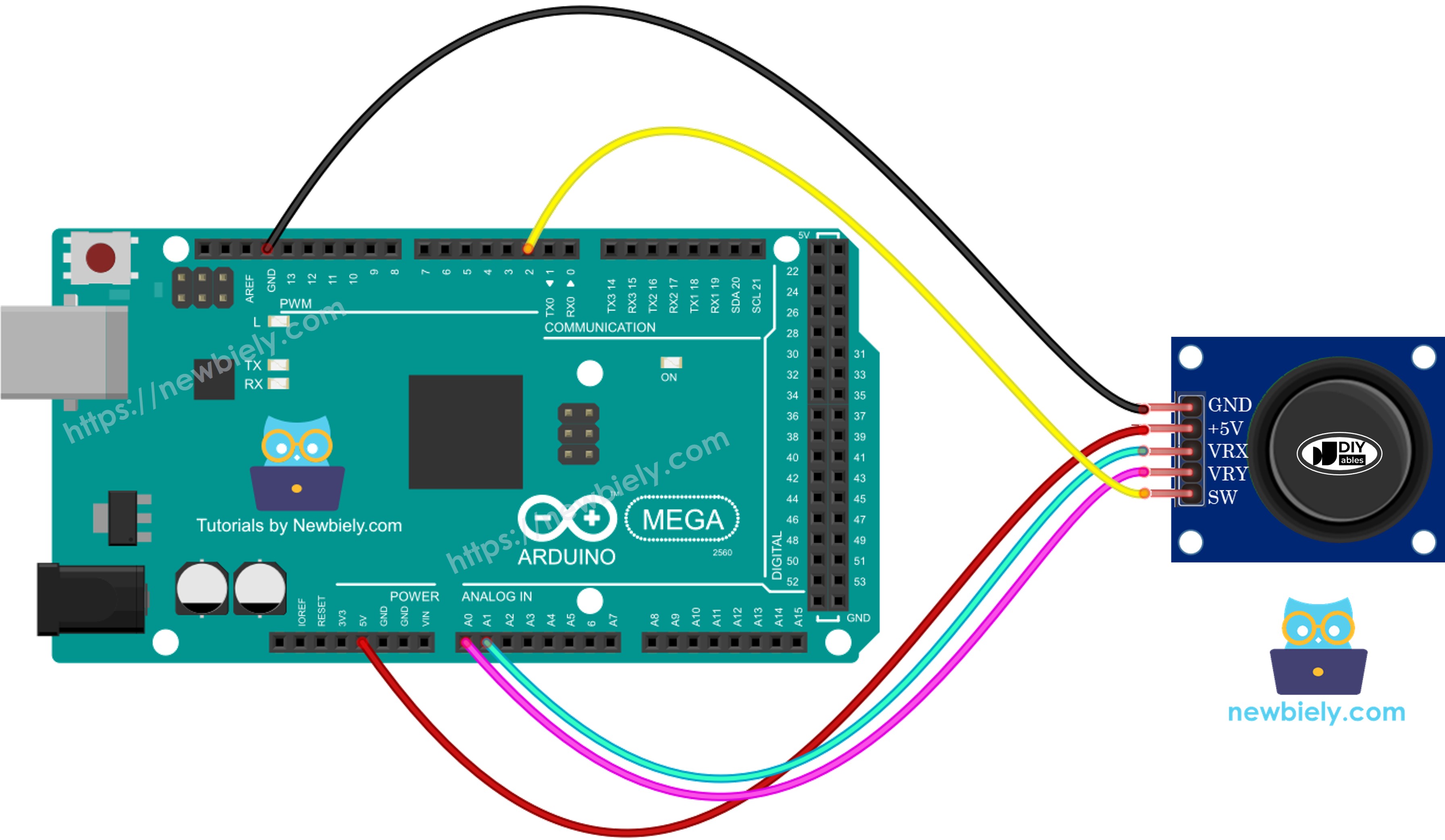
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
Verbindungsübersicht:
| Joystick-Pin | Arduino Mega Pin |
|---|---|
| GND | GND |
| VCC | 5V |
| VRX | A1 |
| VRY | A0 |
| SW | Pin 2 |
Diese Pin-Zuweisungen können bei Bedarf in Ihrem Code geändert werden, um andere Komponenten in Ihrem Projekt zu berücksichtigen.
Wie man für den Joystick programmiert
Lassen Sie uns die Programmiergrundlagen für die Arbeit mit Joystick-Modulen erkunden! Der Joystick kombiniert zwei unterschiedliche Eingabetypen - analoge Positionierung und digitale Button-Erkennung - die verschiedene Programmieransätze erfordern.
Lesen analoger Positionsdaten
Die X- und Y-Achsen des Joysticks sind analoge Eingänge, wodurch sie einfach zu lesen sind. Verwenden Sie einfach die analogRead()-Funktion auf den verbundenen analogen Pins:
Diese Werte reichen von 0 bis 1023, wobei etwa 512 die Mitte (neutrale Position) darstellt. Sie können diese Werte kontinuierlich in Ihrer loop()-Funktion lesen, um Joystick-Bewegungen in Echtzeit zu verfolgen.
Lesen des Push-Buttons
Für die digitale Button-Komponente (SW-Pin) empfehlen wir die Verwendung der ezButton-Bibliothek anstatt einfacher digitalRead()-Aufrufe. Hier ist der Grund:
- Entprellung: Die ezButton-Bibliothek enthält eingebaute Entprellungsalgorithmen, die elektrisches Rauschen und mechanisches Prellen herausfiltern und zuverlässige Button-Status-Erkennung gewährleisten
- Flanken-Erkennung: Sie bietet einfache Methoden zur Erkennung von Drück-Ereignissen, Loslassen-Ereignissen und kontinuierlichen Drück-Zuständen
- Saubererer Code: Vereinfacht die Button-Behandlung mit intuitiven Funktionen
Sie können vollständige Button-Programmiertechniken in unserem Arduino Mega - Button Tutorial lernen. Wir werden die ezButton-Verwendung in den folgenden Code-Beispielen demonstrieren.
Verarbeitung von Joystick-Daten
Nach dem Lesen roher analoger Werte müssen Sie sie oft in nützlichere Formate umwandeln:
- Richtungsbefehle (OBEN, UNTEN, LINKS, RECHTS)
- Servo-Winkel (0° bis 180°)
- Motor-Geschwindigkeiten (-255 bis +255)
- Cursor-Koordinaten für Displays
Die Code-Beispiele im nächsten Abschnitt demonstrieren mehrere gängige Datentransformationstechniken, die Sie für Ihre spezifische Anwendung anpassen können.
Arduino Mega Code
Lassen Sie uns in praktische Code-Beispiele eintauchen, die verschiedene Methoden zur Arbeit mit Joystick-Daten demonstrieren! Wir haben mehrere progressiv fortgeschrittene Beispiele vorbereitet, um Ihnen bei der Meisterung der Joystick-Programmierung zu helfen:
- Beispiel 1: Lesen und Anzeigen roher analoger Joystick-Werte (X- und Y-Positionsdaten)
- Beispiel 2: Lesen analoger Werte plus Erkennung von Push-Button-Drück-Ereignissen
- Beispiel 3: Umwandlung analoger Positionsdaten in Richtungsbefehle (NACH LINKS BEWEGEN, NACH RECHTS BEWEGEN, NACH OBEN BEWEGEN, NACH UNTEN BEWEGEN)
- Beispiel 4: Transformation analoger Werte in Servomotor-Winkel zur Steuerung eines Pan-Tilt-Kamera-Systems
Jedes Beispiel baut auf den vorherigen Konzepten auf, daher empfehlen wir, sie der Reihe nach durchzuarbeiten, wenn Sie neu in der Joystick-Programmierung sind.
Liest analoge Werte vom Joystick
Schnelle Schritte
Folgen Sie diesen detaillierten Schritten sorgfältig, um Ihr Joystick-Setup zu testen:
Schritt 1 - Physische Verbindung: Verbinden Sie den Joystick mit dem Arduino Mega unter Verwendung des oben gezeigten Schaltplans. Überprüfen Sie doppelt, dass VCC, GND, VRX, VRY und SW alle mit den richtigen Pins verbunden sind.
Schritt 2 - USB-Verbindung: Verbinden Sie das Arduino Mega Board mit Ihrem Computer über ein USB-Kabel. Warten Sie, bis Ihr Betriebssystem das Gerät erkennt.
Schritt 3 - Arduino IDE starten: Öffnen Sie die Arduino IDE Software auf Ihrem Computer. Falls Sie sie noch nicht installiert haben, laden Sie sie von der offiziellen Arduino-Website herunter.
Schritt 4 - Board-Konfiguration: Navigieren Sie zu Tools > Board und wählen Sie "Arduino Mega or Mega 2560". Gehen Sie dann zu Tools > Port und wählen Sie den entsprechenden COM-Port.
Schritt 5 - Code laden: Kopieren Sie das obige Code-Beispiel und fügen Sie es in das Arduino IDE Editor-Fenster ein.
Schritt 6 - Programm hochladen: Klicken Sie den Upload-Button (Pfeil-nach-rechts-Symbol) in der Arduino IDE, um den Code zu kompilieren und auf Ihr Arduino Mega zu übertragen. Warten Sie auf die "Done uploading"-Meldung.
Schritt 7 - Bewegung testen: Bewegen Sie den Joystick zu seinen extremen Rändern und drehen Sie ihn in vollständigen Kreisen (im oder gegen den Uhrzeigersinn), um den gesamten Bewegungsbereich zu testen.
Schritt 8 - Ausgabe überwachen: Öffnen Sie den Serial Monitor (Tools > Serial Monitor oder Strg+Shift+M), um die Echtzeit-Joystick-Daten zu betrachten.
Die Ausgabe verstehen:
- Wenn X nahe 0 liest, ist der Joystick vollständig nach LINKS bewegt
- Wenn X nahe 1023 liest, ist der Joystick vollständig nach RECHTS bewegt
- Wenn Y nahe 0 liest, ist der Joystick vollständig NACH OBEN bewegt
- Wenn Y nahe 1023 liest, ist der Joystick vollständig NACH UNTEN bewegt
- Die Mittelposition zeigt Werte um 512 für beide Achsen
Profi-Tipp: Ihr Joystick liest möglicherweise nicht genau 0, 512 oder 1023 aufgrund von Herstellungstoleranzen. Typische Mittenwerte reichen von 505-520, und Randwerte können 10-20 Zählungen von den Extremen entfernt sein. Dies ist normal und kann in Ihrem Code durch Kalibrierung oder Schwellenwerte kompensiert werden.
Liest analoge Werte und liest den Button-Status vom Joystick
Schnelle Schritte
Schritt 1 - ezButton-Bibliothek installieren: Klicken Sie das Libraries-Symbol (Buch-Symbol) in der linken Seitenleiste der Arduino IDE, um den Library Manager zu öffnen.
Schritt 2 - Bibliothek suchen: Geben Sie in der Suchbox "ezButton" ein und finden Sie die ezButton-Bibliothek von ArduinoGetStarted.com in den Ergebnissen.
Schritt 3 - Installieren: Klicken Sie den Install-Button, um die ezButton-Bibliothek zu Ihrer Arduino IDE hinzuzufügen. Warten Sie, bis die Installation abgeschlossen ist.

Schritt 4 - Code laden: Kopieren Sie das obige Code-Beispiel und öffnen Sie es im Arduino IDE Editor.
Schritt 5 - Programm hochladen: Klicken Sie den Upload-Button in der Arduino IDE, um den Code zu kompilieren und auf Ihr Arduino Mega hochzuladen.
Schritt 6 - Joystick testen: Bewegen Sie den Joystick in alle Richtungen - links, rechts, oben und unten - um zu sehen, wie sich die analogen Werte ändern.
Schritt 7 - Button testen: Drücken Sie fest nach unten auf die Oberseite des Joysticks, um den integrierten Push-Button zu aktivieren.
Schritt 8 - Ergebnisse anzeigen: Öffnen Sie den Serial Monitor, um Echtzeit-Joystick-Positionsdaten und Button-Drück-Ereignisse zu sehen.
Profi-Tipp: Die Entprellungsfunktion der ezButton-Bibliothek sorgt für saubere, zuverlässige Button-Drück-Erkennung ohne Fehlauslöser durch elektrisches Rauschen oder mechanisches Prellen.
Wandelt analoge Werte in NACH LINKS/RECHTS/OBEN/UNTEN BEWEGEN-Befehle um
Schnelle Schritte
Schritt 1 - Code laden: Kopieren Sie das obige Code-Beispiel und öffnen Sie es im Arduino IDE Editor-Fenster.
Schritt 2 - Programm hochladen: Klicken Sie den Upload-Button in der Arduino IDE, um den Code zu kompilieren und auf das Arduino Mega hochzuladen.
Schritt 3 - Richtungen testen: Bewegen Sie den Joystick gezielt in jede Himmelsrichtung - links, rechts, oben und unten - sowie in diagonale Richtungen.
Schritt 4 - Befehle anzeigen: Öffnen Sie den Serial Monitor, um die interpretierten Richtungsbefehle in Echtzeit zu sehen.
※ Notiz:
Befehlsausgabe verstehen: Je nach Joystick-Position sehen Sie möglicherweise keinen Befehl (Mitte/neutrale Position), einen einzelnen Befehl (reine Himmelsrichtung) oder zwei gleichzeitige Befehle (diagonale Bewegung wie OBEN + LINKS oder UNTEN + RECHTS). Dies ist völlig normal und stellt die kontinuierliche 2D-Positionierungsfähigkeit des Joysticks dar.
Anwendungsideen: Dieser befehlsbasierte Ansatz ist perfekt für Roboter-Navigation, Charakterbewegung in Spielen, Menü-Navigation oder jede Anwendung, bei der Sie diskrete Richtungsanweisungen anstatt roher analoger Werte benötigen.
Wandelt analoge Werte in Winkel um, um zwei Servomotoren zu steuern
Dieses fortgeschrittene Beispiel demonstriert eine der beliebtesten Joystick-Anwendungen: die Steuerung einer Pan-Tilt-Kamera-Halterung oder eines Roboterarms mit zwei Servomotoren! Die X-Achse steuert das horizontale Schwenken, während die Y-Achse das vertikale Neigen steuert. Für ein vollständiges, detailliertes Tutorial mit Code und Schaltplänen sehen Sie unser spezielles Arduino Mega - Joystick Servo Motor Tutorial.
Video Tutorial
Wir erwägen die Erstellung von Video-Tutorials. Wenn Sie Video-Tutorials für wichtig halten, abonnieren Sie bitte unseren YouTube-Kanal , um uns zu motivieren, die Videos zu erstellen.