Arduino Mega - Schrittmotor und Endschalter
Bereit zu lernen, wie Sie Schrittmotoren mit Endschaltern steuern? Sie sind hier genau richtig! Dieses umfassende Arduino Mega Tutorial führt Sie durch alles, was Sie über die Kombination dieser beiden wesentlichen Komponenten für präzise Bewegungssteuerung in Ihren Projekten wissen müssen.
Ob Sie einen 3D-Drucker, eine CNC-Maschine, einen Roboterarm oder ein automatisches Türsystem bauen - das Verständnis für die Verwendung von Endschaltern mit Schrittmotoren ist eine entscheidende Fähigkeit, die unzählige Möglichkeiten eröffnet. Endschalter fungieren als die "Augen" Ihres mechanischen Systems und teilen Ihrem Arduino Mega mit, wann bewegliche Teile bestimmte Positionen erreicht haben, während Schrittmotoren die präzise, kontrollierte Bewegung liefern, die Automatisierung möglich macht.
In diesem praxisorientierten Leitfaden erkunden wir drei praktische Szenarien, denen Sie in realen Projekten begegnen werden: sofortiges Stoppen eines Schrittmotors, wenn er einen Endschalter erreicht, automatisches Umkehren der Richtung und Erstellen eines Systems, das die Richtung basierend auf zwei verschiedenen Endschaltern ändert. Diese Techniken sind das Fundament vieler automatisierter Systeme, von einfachen Linearantrieben bis hin zu komplexen mehrachsigen Maschinen.
Am Ende dieses Tutorials werden Sie das Vertrauen haben, Arduino Mega Schrittmotor Endschalter Steuerung in Ihre eigenen Projekte zu integrieren, und Sie werden die Programmierlogik hinter professionellen Automatisierungssystemen verstehen. Lassen Sie uns eintauchen und intelligente Bewegungssteuerung zu Ihren Arduino Mega Projekten bringen - ich verspreche, es ist einfacher als Sie vielleicht denken!
Benötigte Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Über Schrittmotor und Endschalter
Schrittmotoren und Endschalter sind eine perfekte Partnerschaft in Automatisierungsprojekten und arbeiten zusammen, um präzise, kontrollierte Bewegungssysteme zu schaffen, die genau wissen, wo sie sich befinden und wann sie stoppen müssen. Denken Sie an diese Kombination als das Gehirn und das Sinnessystem der mechanischen Automatisierung - der Schrittmotor liefert präzise Bewegung, während der Endschalter Positionsrückmeldung bietet.
Ein Schrittmotor ist ein bürstenloser DC-Motor, der eine vollständige Umdrehung in eine große Anzahl diskreter Schritte unterteilt (typischerweise 200 Schritte pro Umdrehung für NEMA 17 Motoren). Das bedeutet, Sie können die Rotation mit unglaublicher Präzision steuern - bis auf 1,8 Grad pro Schritt! Im Gegensatz zu herkömmlichen DC-Motoren, die kontinuierlich drehen, bewegen sich Schrittmotoren in exakten Schritten, was sie ideal für Anwendungen macht, bei denen Sie genau wissen müssen, wie weit sich etwas bewegt hat. Sie werden häufig in 3D-Druckern, CNC-Maschinen, Kamera-Gimbals und Robotersystemen verwendet, da sie ihre Position auch bei abgeschalteter Stromversorgung halten können und für die grundlegende Positionierung keine Rückmeldesensoren benötigen.
Endschalter sind mechanische Schalter, die erkennen, wann ein bewegliches Objekt eine bestimmte Position oder Grenze erreicht hat. Sie fungieren als Sicherheitsvorrichtungen und Positionssensoren und teilen Ihrem Arduino Mega mit: "Hey, wir haben das Ende des Verfahrwegs erreicht!" oder "Das bewegliche Teil befindet sich jetzt in der Ausgangsposition." Die meisten Endschalter sind normalerweise offen (NO), das bedeutet, sie schließen den Stromkreis, wenn sie gedrückt werden, obwohl einige normalerweise geschlossen (NC) sind. Sie sind unglaublich zuverlässig, können hohe Ströme handhaben und funktionieren in rauen Umgebungen - weshalb Sie sie in allem finden, von Garagentoröffnern bis hin zu Industriemaschinen.
Wenn Sie Arduino Mega Schrittmotor und Endschalter Steuerung kombinieren, erstellen Sie intelligente Bewegungssysteme, die sich präzise bewegen können und ihre Grenzen kennen. Diese Kombination ist wesentlich für die Erstellung von Linearantrieben, automatisierten Schiebemechanismen, Robotergelenken mit definierten Bereichen und jedem System, das sich sicher und genau zwischen bestimmten Positionen bewegen muss.
Wenn Sie nichts über Schrittmotoren und Endschalter wissen (Pinbelegung, Funktionsweise, Programmierung ...), lernen Sie in den folgenden Tutorials darüber:
- Arduino Mega - Endschalter Tutorial
- Arduino Mega - Schrittmotor steuern Tutorial
Verdrahtungsdiagramm
Schauen wir uns die Verkabelung an - keine Sorge, es ist einfacher als es auf den ersten Blick erscheinen mag! Das Verständnis dieser Verbindungen ist der Schlüssel dafür, dass Ihr Schrittmotor Endschalter Projekt reibungslos funktioniert. Dieses Tutorial behandelt zwei verschiedene Verdrahtungskonfigurationen: eine für ein System mit einem Endschalter und eine andere für ein System mit zwei Endschaltern.
Dieses Tutorial stellt Arduino Mega Code für zwei Fälle bereit: Ein Schrittmotor + ein Endschalter, Ein Schrittmotor + zwei Endschalter.
- Verdrahtungsdiagramm zwischen Schrittmotor und einem Endschalter
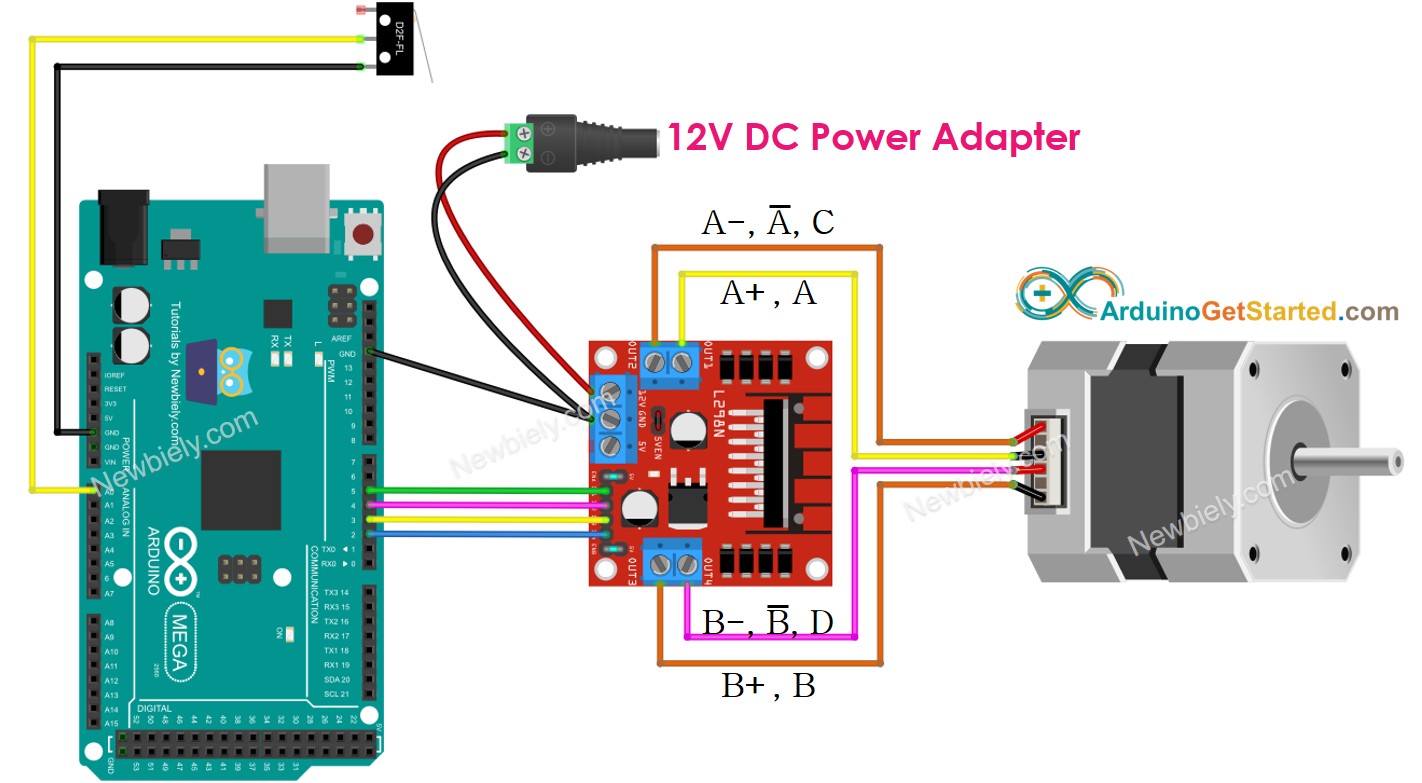
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
| Bauteil-Pin | Arduino Mega Pin |
|---|---|
| Schrittmotor (über L298N) IN1 | Pin 5 |
| Schrittmotor (über L298N) IN2 | Pin 4 |
| Schrittmotor (über L298N) IN3 | Pin 3 |
| Schrittmotor (über L298N) IN4 | Pin 2 |
| Endschalter Signal | Pin A0 |
| Endschalter GND | GND |
| L298N VCC | 5V |
| L298N GND | GND |
| L298N 12V | Externes 12V Netzteil |
- Verdrahtungsdiagramm zwischen Schrittmotor und zwei Endschaltern
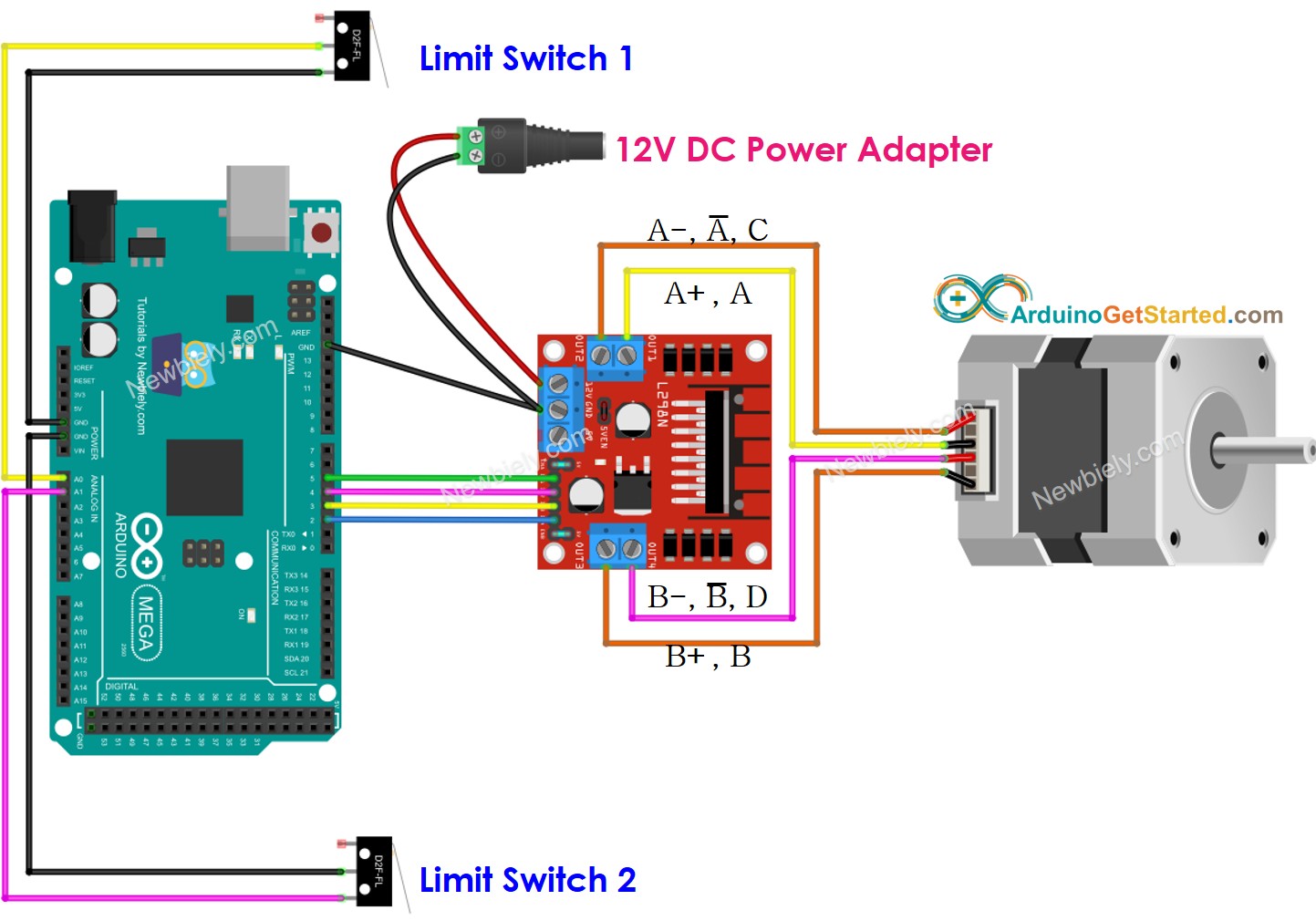
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
| Bauteil-Pin | Arduino Mega Pin |
|---|---|
| Schrittmotor (über L298N) IN1 | Pin 5 |
| Schrittmotor (über L298N) IN2 | Pin 4 |
| Schrittmotor (über L298N) IN3 | Pin 3 |
| Schrittmotor (über L298N) IN4 | Pin 2 |
| Endschalter 1 Signal | Pin A0 |
| Endschalter 2 Signal | Pin A1 |
| Endschalter 1 & 2 GND | GND |
| L298N VCC | 5V |
| L298N GND | GND |
| L298N 12V | Externes 12V Netzteil |
Wichtiger Sicherheitshinweis: Stellen Sie sicher, dass Sie das externe 12V Netzteil ordnungsgemäß an das L298N Treiber-Modul anschließen. Der Schrittmotor benötigt mehr Strom, als das Arduino Mega direkt liefern kann, weshalb wir den L298N Treiber verwenden. Überprüfen Sie immer Ihre Stromversorgungsverbindungen, bevor Sie Strom anlegen, um Schäden an Ihren Komponenten zu vermeiden.
※ Notiz:
Je nach Schrittmotor kann die Verdrahtung zwischen Schrittmotor und L298N unterschiedlich sein. Schauen Sie sich bitte genau dieses Arduino Mega - Schrittmotor Tutorial an, um zu sehen, wie Sie den Schrittmotor an den L298N Motor-Treiber anschließen.
Arduino Mega Code - Schrittmotor durch Endschalter stoppen
Jetzt kommt der aufregende Teil - lassen Sie uns dieses Projekt mit Code zum Leben erwecken! Machen Sie sich keine Sorgen, wenn Sie neu in der Programmierung von Schrittmotoren oder der Arbeit mit Endschaltern sind; wir gehen alles Schritt für Schritt durch. Das Schöne an diesem Ansatz ist, dass Sie, sobald Sie die Grundkonzepte verstehen, sie auf alle Arten von Automatisierungsprojekten anwenden können.
Es gibt mehrere Möglichkeiten, einen Schrittmotor zu stoppen, und das Verständnis des Unterschieds ist wichtig für Ihre Projekte:
- stepper.stop() Funktion aufrufen: Diese Methode stoppt den Schrittmotor nicht sofort, sondern verzögert ihn allmählich bis zum Stillstand. Das ist schonender für das mechanische System und bietet einen sanfteren Betrieb.
- stepper.run() Funktion NICHT aufrufen: Diese Methode stoppt den Schrittmotor sofort, indem einfach keine Schrittimpulse gesendet werden. Das bietet sofortiges Stoppen, kann aber abrupter sein.
Für Endschalter-Anwendungen wird normalerweise das sofortige Stoppen bevorzugt, da es präzise Positionierung bietet und verhindert, dass der Motor über die Endschalter-Position hinausläuft. Der folgende Code zeigt, wie Sie einen Schrittmotor kontinuierlich drehen lassen und sofort stoppen, wenn ein Endschalter ausgelöst wird.
Schnelle Schritte
Neu bei Arduino? Kein Problem! Beginnen Sie mit unserem Arduino Mega Getting Started Leitfaden, um zuerst die Grundlagen zu lernen.
- Hardware verbinden: Verkabeln Sie Ihr Arduino Mega, L298N Motor-Treiber, Schrittmotor und Endschalter entsprechend dem obigen Verdrahtungsdiagramm. Lassen Sie sich Zeit für diesen Schritt - das Überprüfen der Verbindungen jetzt erspart Ihnen später Zeit bei der Fehlersuche!
- Arduino Mega IDE einrichten: Verbinden Sie Ihr Arduino Mega über USB-Kabel mit Ihrem PC, öffnen Sie dann die Arduino Mega IDE und wählen Sie das richtige Board (Arduino Mega) und den COM-Port. Wenn Sie nicht sicher sind, welcher Port, überprüfen Sie den Geräte-Manager unter Windows oder die Systeminformationen am Mac.
- Erforderliche Bibliotheken installieren: Navigieren Sie zum Bibliotheken-Symbol in der linken Leiste der Arduino Mega IDE. Wir benötigen zwei wesentliche Bibliotheken für dieses Projekt - keine Sorge, die Installation ist super einfach!
- ezButton Bibliothek installieren: Suchen Sie nach "ezButton", dann finden Sie die Button-Bibliothek von ArduinoGetStarted.com. Klicken Sie auf den Install-Button, um diese hilfreiche Bibliothek hinzuzufügen, die die Arbeit mit Buttons und Schaltern viel einfacher macht.

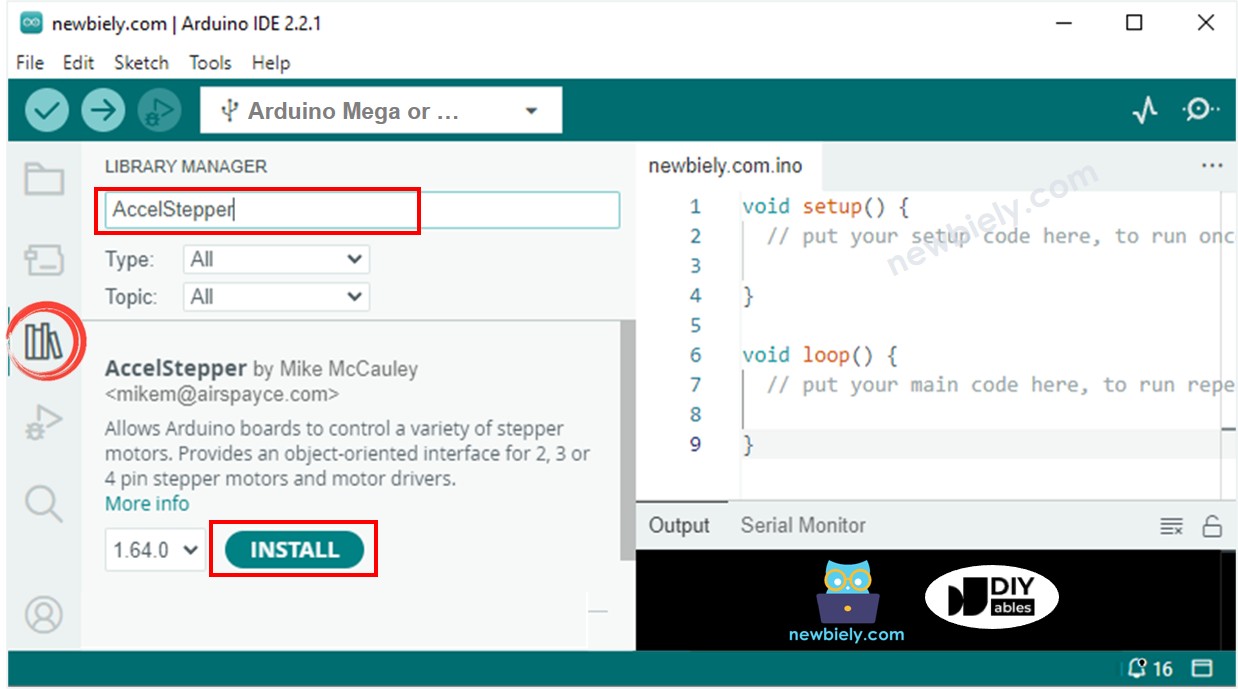
- AccelStepper Bibliothek installieren: Suchen Sie nach "AccelStepper", dann finden Sie die AccelStepper Bibliothek von Mike McCauley. Klicken Sie auf Install, um diese leistungsstarke Bibliothek hinzuzufügen, die die Schrittmotor-Steuerung viel handhabbarer macht als die Verwendung von grundlegenden digitalWrite-Befehlen.
- Code hochladen: Kopieren Sie den obigen Code und fügen Sie ihn in die Arduino Mega IDE ein. Klicken Sie auf den Upload-Button, um das Programm auf Ihr Arduino zu übertragen. Sie werden während des Uploads einige blinkende Lichter am Arduino Mega sehen - das ist völlig normal!
- System testen: Wenn Ihre Verkabelung korrekt ist, sehen Sie, wie der Motor im Uhrzeigersinn zu rotieren beginnt. Der Schrittmotor wird weiter drehen, bis Sie mit ihm interagieren.
- Endschalter auslösen: Drücken Sie oder berühren Sie vorsichtig den Endschalter. Sie sollten sehen, wie der Motor sofort stoppt! Diese sofortige Reaktion ist genau das, was Sie für präzise Positionssteuerung wollen.
- Ergebnisse überwachen: Öffnen Sie den Serial Monitor (Tools > Serial Monitor), um Echtzeit-Feedback darüber zu sehen, was passiert. Das Arduino Mega teilt Ihnen mit, wann der Endschalter gedrückt wird und bestätigt, dass der Motor gestoppt hat.
Profi-Tipp: Wenn sich Ihr Motor nicht bewegt oder in die falsche Richtung dreht, versuchen Sie, zwei der Schrittmotor-Drähte an den L298N-Verbindungen zu vertauschen. Die Schrittmotor-Verkabelung kann je nach Hersteller variieren, machen Sie sich also keine Sorgen, wenn Sie ein wenig experimentieren müssen, um es richtig hinzubekommen!
Serial Monitor Ausgabe
Code-Erklärung
Lesen Sie die zeilenweise Erklärung in den Kommentarzeilen des Codes!
Arduino Mega Code - Richtung des Schrittmotors durch Endschalter ändern
Dieses nächste Beispiel zeigt Ihnen, wie Sie ein anspruchsvolleres System erstellen, bei dem der Schrittmotor automatisch die Richtung umkehrt, wenn er einen Endschalter erreicht. Das ist unglaublich nützlich für die Erstellung oszillierender Systeme, automatischer Hin- und Her-Bewegungen oder Sicherheitssysteme, die umkehren, wenn sie auf Hindernisse treffen.
Das Schöne an diesem Ansatz ist, dass es ein eigenständiges System schafft, das unbegrenzt laufen kann und die Richtung ändert, wann immer der Endschalter aktiviert wird. Diese Technik wird häufig in automatisierten Vorhang-Systemen, Schiebetür-Mechanismen und Linearantrieben verwendet, die zwischen zwei Positionen bewegen müssen.
Schnelle Schritte
- System vorbereiten: Stellen Sie sicher, dass Sie die gleiche Hardware-Einrichtung wie im vorherigen Beispiel haben - Arduino Mega, L298N Treiber, Schrittmotor und Endschalter, alle entsprechend unserem Verdrahtungsdiagramm verbunden.
- Neuen Code hochladen: Kopieren Sie den obigen Code und öffnen Sie ihn mit der Arduino Mega IDE. Klicken Sie auf den Upload-Button, um dieses neue Programm auf Ihr Arduino zu übertragen. Das Schöne am Arduino Mega ist, wie einfach es ist, verschiedene Programme mit der gleichen Hardware auszuprobieren!
- Anfangsbewegung beobachten: Wenn Ihre Verkabelung korrekt ist, sehen Sie, wie der Motor im Uhrzeigersinn zu drehen beginnt. Das ist die im Code eingestellte Standard-Startrichtung.
- Richtungsänderung testen: Berühren Sie oder drücken Sie den Endschalter und schauen Sie, was passiert. Sie sollten sehen, wie der Schrittmotor sofort zu einer Gegen-Uhrzeiger-Rotation (entgegen dem Uhrzeigersinn) wechselt. Diese Richtungsänderung sollte sanft und sofort sein.
- Kontinuierlichen Betrieb testen: Berühren Sie den Endschalter erneut, und Sie werden sehen, wie der Motor zurück zur Uhrzeiger-Rotation wechselt. Das System wird dieses Hin-und-Her-Muster jedes Mal fortsetzen, wenn der Endschalter aktiviert wird.
- System überwachen: Lassen Sie den Serial Monitor geöffnet, um Echtzeit-Updates über Richtungsänderungen zu sehen. Dieses Feedback hilft Ihnen zu verstehen, wann genau das System den Endschalter erkennt und die Richtung ändert.
- Mit Positionierung experimentieren: Versuchen Sie, den Endschalter an verschiedenen Positionen zu platzieren, um zu sehen, wie es die Verfahrstrecke des Motors beeinflusst. Das wird Ihnen helfen zu verstehen, wie Sie Endschalter in Ihren eigenen Projekten positionieren.
Profi-Tipp: Diese Art der automatischen Richtungsumkehr ist perfekt für die Erstellung pendelartiger Bewegungen oder Systeme, die hin und her schwingen müssen. Sie können die Motorgeschwindigkeit im Code anpassen, um die Bewegung je nach Anwendung schneller oder langsamer zu machen!
Serial Monitor Ausgabe
Arduino Mega Code - Richtung des Schrittmotors durch zwei Endschalter ändern
Lassen Sie uns nun die anspruchsvollste Einrichtung erkunden - die Verwendung von zwei Endschaltern zur Erstellung eines vollständig automatisierten Systems mit definierten Grenzen! Diese Konfiguration ist das Fundament vieler professioneller Automatisierungssysteme, einschließlich 3D-Drucker, CNC-Maschinen und Robotersysteme, die innerhalb bestimmter Grenzen operieren müssen.
Mit zwei Endschaltern können Sie ein System erstellen, das automatisch die Richtung ändert, wenn es eines der beiden Enden seines Verfahrbereichs erreicht. Das schafft eine völlig autonome Hin-und-Her-Bewegung, die perfekt für Anwendungen wie automatisierte Schiebetüren, Fördersysteme oder jeden Mechanismus ist, der sich wiederholt zwischen zwei bestimmten Positionen bewegen muss.
Schnelle Schritte
- Verkabelung aktualisieren: Folgen Sie dem Zwei-Endschalter-Verdrahtungsdiagramm, das früher in diesem Tutorial gezeigt wurde. Sie fügen einen zweiten Endschalter an Pin 6 hinzu, während Sie den ersten an Pin 7 behalten. Lassen Sie sich Zeit bei den Verbindungen - zwei Schalter zu haben bedeutet, dass doppeltes Überprüfen besonders wichtig ist!
- Endschalter positionieren: Platzieren Sie die beiden Endschalter an gegenüberliegenden Enden des Verfahrwegs Ihres Motors. Denken Sie an sie als die "Grenzen" Ihres Systems - wenn das bewegliche Teil einen der Schalter berührt, sollte es die Richtung umkehren.
- Zwei-Schalter-Code hochladen: Kopieren Sie den obigen Code und öffnen Sie ihn mit der Arduino Mega IDE. Klicken Sie auf Upload, um dieses erweiterte Programm auf Ihr Arduino zu übertragen. Dieser Code ist darauf ausgelegt, intelligent mit Eingaben von beiden Endschaltern umzugehen.
- Anfangsbetrieb testen: Wenn Ihre Verkabelung korrekt ist, sehen Sie, wie der Motor im Uhrzeigersinn zu drehen beginnt, genau wie in unseren vorherigen Beispielen. Der Motor wird in dieser Richtung weiterlaufen, bis er den ersten Endschalter erreicht.
- Endschalter 1 auslösen: Wenn Sie Endschalter 1 (verbunden mit Pin 6) berühren oder aktivieren, sollten Sie sehen, wie der Schrittmotor sofort zu einer Gegen-Uhrzeiger-Rotation wechselt. Das System weiß jetzt, dass es eine Grenze erreicht hat und umkehren muss.
- Endschalter 2 auslösen: Während der Motor in die entgegengesetzte Richtung dreht, aktivieren Sie Endschalter 2 (verbunden mit Pin 7). Der Motor sollte nun zurück zur Uhrzeiger-Rotation wechseln und einen vollständigen Zyklus schaffen.
- Automatischen Betrieb beobachten: Nachdem Sie beide Schalter getestet haben, können Sie das System automatisch laufen lassen. Wenn richtig positioniert, wird sich der bewegliche Mechanismus zwischen den beiden Endschaltern hin und her bewegen und eine sanfte, kontrollierte Oszillation erzeugen.
- Positionierung fein abstimmen: Passen Sie die physische Position Ihrer Endschalter an, um die Verfahrstrecke zu ändern. Das ermöglicht es Ihnen, den Bewegungsbereich für Ihre spezifische Anwendung anzupassen.
Profi-Tipp: Diese Zwei-Endschalter-Einrichtung ist unglaublich vielseitig! Sie können sie verwenden, um alles von automatisierten Fensterjalousien bis hin zu Kamera-Slider-Systemen zu erstellen. Der Schlüssel ist, die Schalter genau an den richtigen Stellen für Ihren beabsichtigten Bewegungsbereich zu positionieren!
Serial Monitor Ausgabe
Anwendungsideen
Projektanwendungen: Jetzt, da Sie Arduino Mega Schrittmotor Endschalter Steuerung beherrschen, ist Ihrer Kreativität keine Grenzen gesetzt! Hier sind einige aufregende Projektideen für den Einstieg:
Sie könnten ein automatisiertes Schiebetür-System erstellen, das sich basierend auf Sensoreingaben öffnet und schließt, wobei Endschalter sicherstellen, dass es niemals über das Ziel hinausschießt und den Mechanismus beschädigt. Bauen Sie einen Kamera-Slider für sanfte, professionelle Videoaufnahmen, der automatisch zwischen zwei Positionen für Zeitrafferaufnahmen fährt. Richten Sie einen Linearantrieb zum Öffnen von Fenstern, Anpassen von Solarpanels oder Steuern von Belüftungssystemen in Gewächshäusern ein.
Erwägen Sie die Entwicklung einer automatisierten Vorhang- oder Jalousie-Steuerung, die auf Lichtsensoren und Zeitpläne reagiert, wobei Endschalter verhindern, dass der Motor läuft, wenn die Vorhänge ihre vollständig geöffnete oder geschlossene Position erreichen. Sie könnten sogar eine einfache CNC- oder 3D-Drucker-Achse konstruieren, wobei Sie diese Techniken als Grundlage für komplexere mehrachsige Systeme verwenden.
Für fortgeschrittenere Projekte versuchen Sie, ein Roboterarm-Gelenk mit definierten Bewegungsgrenzen zu bauen, ein automatisiertes Sortiersystem, das Gegenstände zwischen Bearbeitungsstationen hin und her bewegt, oder ein Präzisionsmessgerät, das wiederholt zu exakten Positionen zurückkehren kann. Die Kombination aus Schrittmotor-Präzision und Endschalter-Rückmeldung macht alle diese Projekte mit den Fähigkeiten erreichbar, die Sie gerade gelernt haben!
Fordern Sie sich selbst heraus
Fordern Sie sich selbst heraus: Bereit, Ihre Schrittmotor- und Endschalter-Fähigkeiten auf die nächste Stufe zu heben? Probieren Sie diese unterhaltsamen Herausforderungen, um Ihr Wissen zu erweitern und anspruchsvollere Systeme zu bauen!
Einfache Herausforderungen (Perfekt für Anfänger):
- Ändern Sie die Motorgeschwindigkeit durch Ändern des setMaxSpeed() Werts - versuchen Sie, sie für empfindliche Anwendungen langsamer oder für schnelle Positionierung schneller zu machen
- Fügen Sie LED-Anzeigen hinzu, die aufleuchten, wenn jeder Endschalter aktiviert wird, um Ihnen visuelles Feedback über den Systemzustand zu geben
- Ändern Sie die Verzögerung zwischen Richtungsänderungen, indem Sie eine Pause hinzufügen, wenn ein Endschalter ausgelöst wird
Mittlere Herausforderungen (Bereit, Konzepte zu kombinieren):
- Fügen Sie einen Druckknopf hinzu, der eine manuelle Steuerung ermöglicht, um das automatische Endschalter-Verhalten zu übersteuern
- Integrieren Sie ein LCD-Display, um die aktuelle Richtung, den Schalter-Status und die Schrittzahl anzuzeigen
- Erstellen Sie ein System, das zählt, wie oft es zwischen den Endschaltern gereist ist und nach einer vorbestimmten Anzahl von Zyklen stoppt
- Fügen Sie Beschleunigung und Verzögerung hinzu, um den Motor allmählich beschleunigen und verlangsamen zu lassen, anstatt abrupt zu starten und zu stoppen
Fortgeschrittene Herausforderungen (Zeit, kreativ zu werden):
- Bauen Sie ein komplettes lineares Positionierungssystem, bei dem Sie den Motor befehligen können, sich zu bestimmten Positionen zwischen den beiden Endschaltern zu bewegen
- Erstellen Sie eine "Homing"-Sequenz, die beim Start beide Endschalter findet und dann zu einer mittleren Position fährt
- Entwickeln Sie ein System, das seine Verfahrstrecke basierend auf Eingaben von einem Potentiometer oder anderen Sensor variiert
- Entwerfen Sie ein mehrachsiges System mit mehreren Schrittmotoren und Endschalter-Paaren, die zusammenarbeiten
Experten-Level-Herausforderung:
- Bauen Sie ein komplettes CNC-ähnliches Steuerungssystem mit G-Code-ähnlichen Befehlen, das den Motor an präzisen Positionen innerhalb der Endschalter-Grenzen positionieren kann
Beginnen Sie mit den einfachen Herausforderungen und arbeiten Sie sich hoch - machen Sie sich keine