Arduino - DRV8825 Schrittmotor Driver
#NOTE: TRANSLATED TO GERMAN
Bereit zu lernen, wie Sie Schrittmotoren mit Präzision steuern? Sie sind hier genau richtig! Diese Arduino DRV8825 Schrittmotor Driver Anleitung führt Sie durch alles, was Sie wissen müssen, um Ihren Schrittmotor sanft und präzise laufen zu lassen. Egal ob Sie Ihren ersten 3D-Drucker, eine CNC-Maschine oder ein Robotik-Projekt bauen - die Beherrschung des DRV8825 Drivers ist eine essenzielle Fähigkeit, die Ihnen unzählige Möglichkeiten eröffnet.
In dieser umfassenden Anleitung erkunden wir den leistungsstarken DRV8825 Schrittmotor Driver und zeigen Ihnen genau, wie Sie ihn mit Ihrem Arduino verwenden, um präzise Motorsteuerung zu erreichen. Keine Sorge, wenn Sie neu bei Schrittmotoren oder Drivern sind - wir unterteilen alles in leicht verständliche Schritte, denen jeder folgen kann. Der DRV8825 ist einer der beliebtesten Schrittmotor Driver in der Maker-Community, und das aus gutem Grund - er ist zuverlässig, vielseitig und überraschend einfach zu verwenden, sobald Sie die Grundlagen verstehen.
Was diese Anleitung besonders macht, ist, dass wir Ihnen nicht nur zeigen, wie es funktioniert, sondern auch erklären, warum es so funktioniert. Sie lernen über Mikroschritt-Steuerung, Strombegrenzung und alle Funktionen, die den DRV8825 zu einer fantastischen Wahl für präzise Motorsteuerung machen. Am Ende dieser Anleitung werden Sie das Vertrauen haben, Schrittmotor-Steuerung in Ihre eigenen Projekte zu integrieren und genau verstehen, was hinter den Kulissen passiert.
Im Detail werden wir lernen:
- Was das DRV8825 Schrittmotor Driver Modul ist und warum es so beliebt ist
- Wie das DRV8825 Schrittmotor Driver Modul funktioniert und seine wichtigsten Eigenschaften
- Wie Sie den DRV8825 Schrittmotor Driver sicher mit Arduino und Schrittmotor verbinden
- Wie Sie Arduino programmieren, um Schrittmotoren über das DRV8825 Modul mit Präzision zu steuern
- Mikroschritt-Konfigurationen für sanfte, präzise Bewegungen
- Praktische Anwendungen und aufregende Projektideen zur Inspiration für Ihren nächsten Aufbau
Das Schöne an diesem Setup ist, dass Sie professionelle Schrittmotor-Steuerung mit nur wenigen einfachen Verbindungen erreichen. Stellen Sie sich vor, sanfte, präzise Bewegungen für Kamera-Slider, automatisierte Pflanzenbewässerungssysteme oder sogar Ihre eigene Desktop-CNC-Maschine erstellen zu können. Das ist die Macht, die Sie haben werden, sobald Sie diese Anleitung gemeistert haben!
Benötigte Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Über den DRV8825 Schrittmotor Driver
Der DRV8825 ist ein leistungsstarkes und vielseitiges Schrittmotor Driver Modul, das zur ersten Wahl für Maker, Ingenieure und Hobbyisten geworden ist, die präzise Motorsteuerung in ihren Projekten benötigen. Denken Sie an ihn als die intelligente Brücke zwischen den digitalen Signalen Ihres Arduino und der mechanischen Bewegung Ihres Schrittmotors - er nimmt einfache Impulse von Ihrem Mikrocontroller und wandelt sie in die komplexen Strommuster um, die benötigt werden, um Ihren Schrittmotor sanft und präzise zu bewegen.
Dieses bemerkenswerte kleine Modul wird weitverbreitet zur Steuerung von bipolaren Schrittmotoren in Anwendungen verwendet, die von Desktop-3D-Druckern und CNC-Maschinen bis hin zu Roboterarmen und automatisierten Kamerasystemen reichen. Was den DRV8825 so besonders macht, ist seine Kombination aus Leistung, Präzision und benutzerfreundlichen Funktionen. Er kann bis zu 2,2A pro Spule bei ordnungsgemäßer Kühlung verarbeiten (das ist genug Leistung für die meisten NEMA 17 und viele NEMA 23 Motoren), arbeitet über einen weiten Spannungsbereich von 8,2V bis 45V und bietet sechs verschiedene Mikroschritt-Optionen einschließlich Vollschritt, 1/2, 1/4, 1/8, 1/16 und 1/32 Schritt-Auflösung.
Die Schönheit des DRV8825 liegt in seiner eingebauten Intelligenz und Schutzfunktionen. Er enthält einstellbare Strombegrenzung (über das kleine Potentiometer, das Sie auf der Platine sehen werden), Übertemperaturschutz zur Schadensvermeidung und Fehlererkennung, um Sie zu informieren, wenn etwas schief geht. Diese Funktionen bedeuten, dass Sie sich auf Ihr kreatives Projekt konzentrieren können, anstatt sich Sorgen zu machen, versehentlich Ihren Motor oder Driver zu beschädigen. Die Mikroschritt-Fähigkeit ist besonders beeindruckend - sie ermöglicht es Ihnen, unglaublich sanfte Bewegung zu erreichen, indem jeder Vollschritt in kleinere Schritte unterteilt wird, was für Anwendungen, die Präzision und minimale Vibrationen erfordern, unerlässlich ist.
Was noch aufregender ist, ist wie einfach er zu verwenden ist - trotz all dieser ausgeklügelten Funktionalität benötigen Sie nur zwei Arduino-Pins, um sowohl Geschwindigkeit als auch Richtung Ihres Schrittmotors zu steuern. Dies lässt viele Pins für Sensoren, Displays und andere Komponenten in Ihrem Projekt verfügbar. Die Effizienz und Zuverlässigkeit des DRV8825 haben ihn zu einem Standard-Bauteil in unzähligen erfolgreichen Projekten gemacht, von professionellen Fertigungsanlagen bis zu Wochenend-Maker-Projekten.
Um über Schrittmotor-Konzepte wie Vollschritt, Mikroschritt, unipolarer Schrittmotor und bipolarer Schrittmotor zu lernen, schauen Sie in unser Arduino - Schrittmotor Tutorial - es ist eine großartige Grundlage, die alles in dieser Anleitung perfekt verständlich macht!
Es ist beeindruckend, dass die Steuerung von Geschwindigkeit und Richtung eines bipolaren Schrittmotors, wie dem beliebten NEMA 17, nur zwei Pins Ihres Arduino erfordert. Diese Einfachheit eröffnet eine Welt voller Möglichkeiten für komplexe Multi-Achsen-Systeme und lässt Raum für zusätzliche Sensoren und Steuerungen in Ihren Projekten.
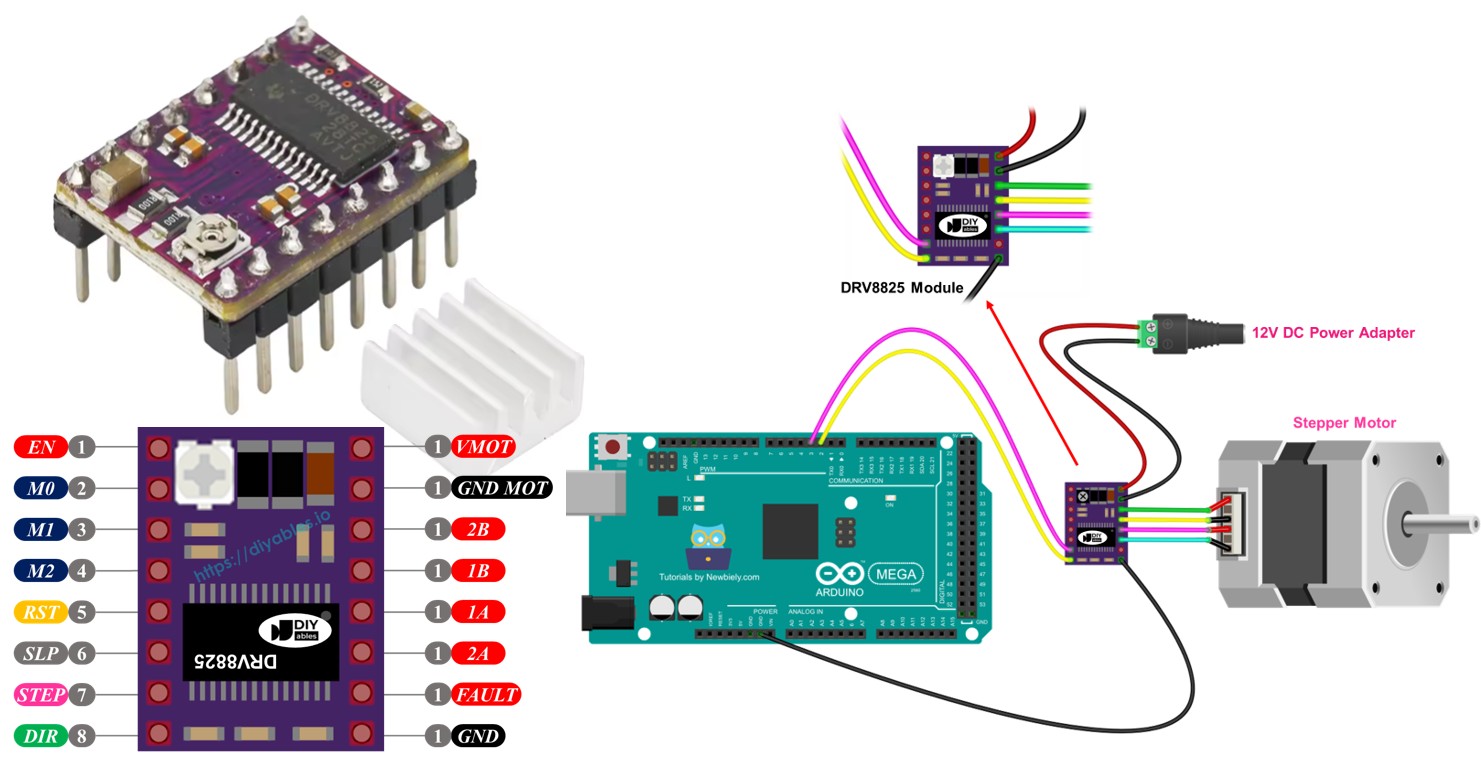
DRV8825 Schrittmotor Driver Pinout
Schauen wir uns das DRV8825 Pinout an - keine Sorge, es ist einfacher als es aussieht! Das Verständnis dieser Pin-Verbindungen ist der Schlüssel, um Ihr Schrittmotor-Projekt zum Laufen zu bringen, und sobald Sie sehen, wie logisch das Layout ist, werden Sie sich viel sicherer beim Verkabeln fühlen.
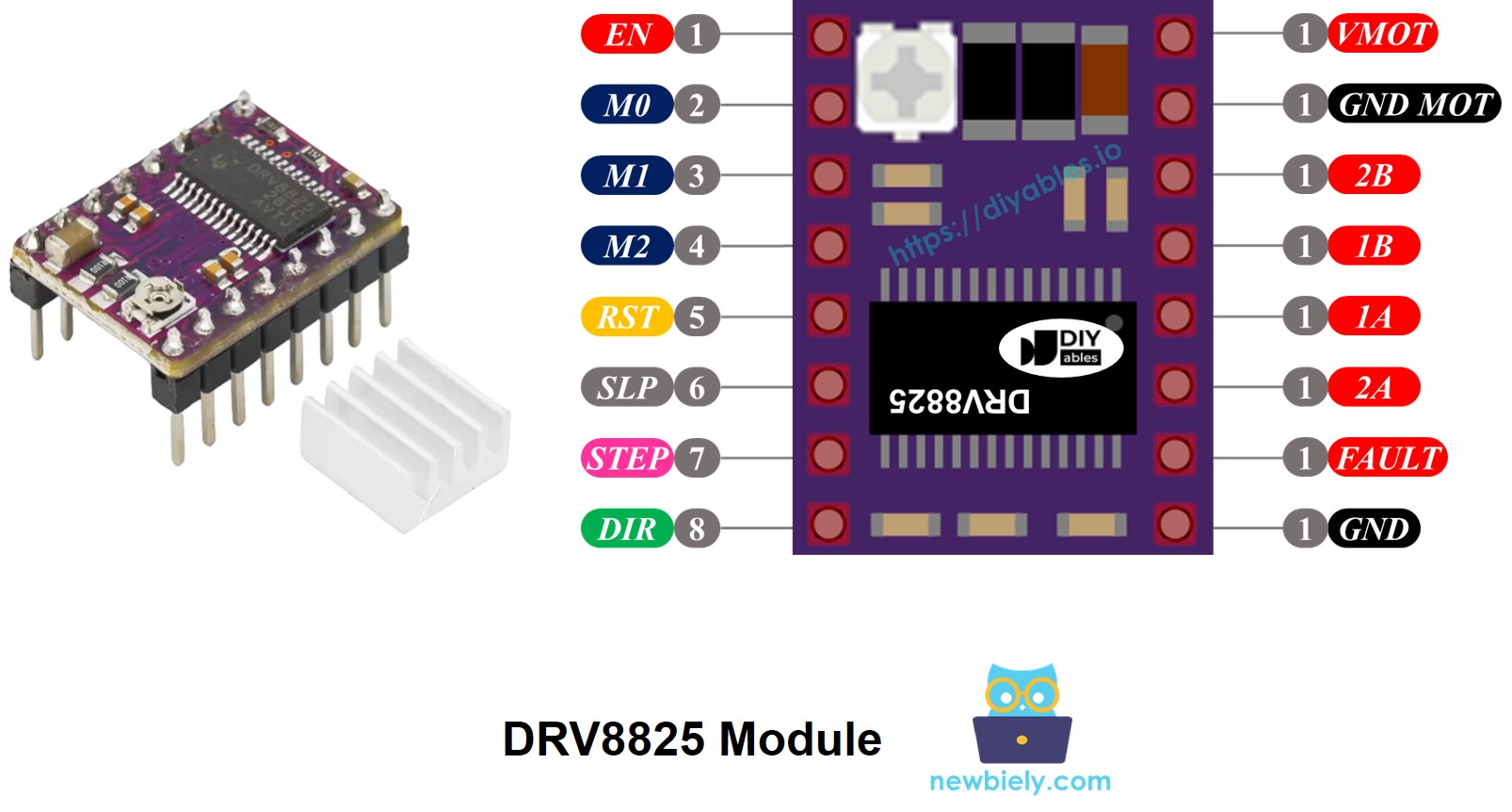
Der DRV8825 Schrittmotor Driver hat 16 Pins, die zunächst überwältigend erscheinen mögen, aber sie sind tatsächlich sehr logisch organisiert. Unten ist das komplette Pinout für das DRV8825 Schrittmotor Driver Modul. Keine Sorge, wenn Ihr spezifisches Modul etwas andere Beschriftungen hat - die Funktionalität bleibt dieselbe, und wir helfen Ihnen dabei, zu identifizieren, was was ist.
| Pin Name | Beschreibung |
|---|---|
| VMOT | Motor-Stromversorgung (8,2 V bis 45 V). Dies ist der Hauptstromeingang, der Ihren Schrittmotor antreibt - verbinden Sie dies mit dem Pluspol Ihrer Motor-Stromversorgung. |
| GND (für Motor) | Masse-Referenz für die Motor-Stromversorgung. Dies schafft den vollständigen Stromkreis für Ihre Motorleistung - verbinden Sie diesen Pin mit dem Minuspol Ihrer Motor-Stromversorgung. |
| 2B, 2A | Ausgänge zu Spule B des Schrittmotors. Diese Pins liefern die kontrollierten Stromimpulse an ein Paar von Motorspulen. |
| 1A, 1B | Ausgänge zu Spule A des Schrittmotors. Diese Pins steuern das andere Paar von Motorspulen und arbeiten zusammen mit 2A/2B, um Rotation zu erzeugen. |
| FAULT | Fehlererkennung Pin. Dieser hilfreiche Pin fungiert als Sicherheitsmonitor - er wird LOW, wenn der Driver Probleme wie Überhitzung oder Überstrom erkennt, wodurch Ihr Arduino entsprechend reagieren kann. |
| GND (für Logik) | Masse-Referenz für die Logiksignale. Dies muss mit dem GND Pin Ihres Arduino verbunden werden, um sicherzustellen, dass alle Signale dieselbe Referenz haben. |
| ENABLE | Active-Low Pin zum Aktivieren/Deaktivieren der Motor-Ausgänge. Setzen Sie diesen auf LOW, um Motorbewegung zu erlauben, HIGH, um den Motor an Ort und Stelle zu fixieren und den Stromverbrauch zu reduzieren. |
| M1, M2, M3 | Mikroschritt-Auflösung Wahlschalter Pins. Diese drei Pins arbeiten wie Schalter zusammen, um zu wählen, wie sanft Sie Ihre Motorbewegung haben möchten (siehe Mikroschritt-Tabelle unten). |
| RESET | Active-Low Reset Pin. Ziehen Sie diesen auf LOW, um den Driver neu zu starten - nützlich, wenn Sie Probleme haben oder das System neu initialisieren möchten. |
| SLEEP | Active-Low Sleep Pin. Ziehen Sie diesen auf LOW, um den Driver in den stromsparenden Sleep-Modus zu versetzen, wenn Sie den Motor nicht verwenden. |
| STEP | Schritt-Eingangspin. Jeder steigende Flanken-Impuls, den Sie an diesen Pin senden, bewegt den Motor um einen Schritt vorwärts - hier passiert die Magie! |
| DIR | Richtungs-Eingangspin. Setzen Sie diesen auf HIGH oder LOW, um zu wählen, in welche Richtung sich Ihr Motor dreht - so einfach ist das! |
Zusätzlich werden Sie ein kleines Potentiometer (sieht aus wie eine winzige Schraube) auf der Platine bemerken, das Sie vorsichtig einstellen können, um die Strombegrenzung zu setzen. Dies ist eine entscheidende Sicherheitsfunktion, die hilft zu verhindern, dass sowohl Ihr Schrittmotor als auch der Driver überhitzen. Denken Sie daran wie an einen Lautstärkeregler, aber für elektrischen Strom - sehr praktisch für die Feinabstimmung Ihres Setups!
Hier ist ein hilfreicher Weg, über diese 16 Pins nachzudenken - sie sind in logische Gruppen basierend darauf organisiert, womit sie sich verbinden:
- Pins verbunden mit dem Schrittmotor: 1A, 1B, 2A, 2B - dies sind die Verbindungspunkte Ihres Motors
- Pins verbunden mit Arduino für Driver-Kontrolle: ENABLE, M1, M2, M3, RESET, SLEEP - diese lassen Sie konfigurieren, wie sich der Driver verhält
- Pins verbunden mit Arduino für Motorbewegung-Kontrolle: DIR, STEP - dies sind die zwei essentiellen Pins, die Ihren Motor bewegen
- Pin für Rückmeldung an Arduino: FAULT - dieser hält Sie über die Gesundheit des Drivers informiert
- Pins verbunden mit der Motor-Stromversorgung: VMOT, GND (Motor Power Ground) - diese liefern die Kraft für Ihren Motor
- Pin verbunden mit Arduino Masse: GND (Logik-Masse) - dies stellt sicher, dass alles ordnungsgemäß kommuniziert
Eine Sache, die den DRV8825 besonders benutzerfreundlich macht, ist, dass er keine separate Logik-Stromversorgung von Ihrem Arduino Board benötigt. Das Modul bezieht clever das, was es benötigt, aus der Motor-Stromversorgung mit seinem internen 3,3V Spannungsregler. Es ist jedoch absolut unerlässlich, die Masse Ihres Arduino mit dem GND (Logik) Pin des DRV8825 Moduls zu verbinden - denken Sie daran als das Schaffen einer gemeinsamen Sprache zwischen Ihrem Arduino und dem Driver, damit sie effektiv kommunizieren können.
Ein häufiger Anfängerfehler ist, diese Masse-Verbindung zu vergessen, was zu unregelmäßigem Verhalten oder überhaupt keiner Bewegung führen kann. Keine Sorge, wenn Sie diesen Fehler zunächst machen - das gehört zum Lernprozess, und sobald Sie sich an dieses Detail erinnern, werden Sie es nie vergessen!
Mikroschritt-Konfiguration
Lassen Sie uns nun in eine der coolsten Funktionen des DRV8825 eintauchen - Mikroschritt-Steuerung! Hier wird es richtig aufregend, denn Mikroschritt-Steuerung ist das, was einen einfachen Schrittmotor von groben, offensichtlichen Schritten in seidig-sanfte, präzise Bewegungen verwandelt, die teure Servo-Systeme übertreffen.
Der DRV8825 Driver ermöglicht Mikroschritt-Steuerung, indem er jeden Vollschritt in kleinere Schritte unterteilt, ähnlich wie beim Hineinzoomen in ein Foto, um feinere Details zu sehen. Anstatt von einer Position zur nächsten zu springen, gleitet der Motor sanft, indem er sorgfältig berechnete Zwischenstromwerte an die Motorspulen anlegt. Es ist wirklich ziemlich genial, wenn man darüber nachdenkt!
Schauen wir uns ein praktisches Beispiel mit dem beliebten NEMA 17 Motor mit seinem Standard 1,8° Schrittwinkel an (was 200 Schritten pro vollständige Umdrehung entspricht):
- Vollschritt (1/1) Modus: 200 Schritte pro Umdrehung - dies ist der Grundmodus mit dem meisten Drehmoment, aber sichtbaren Schritten
- 1/2-Schritt Modus: 400 Schritte pro Umdrehung - merklich sanfter mit gutem Drehmoment
- 1/4-Schritt Modus: 800 Schritte pro Umdrehung - viel sanftere Bewegung, großartig für die meisten Anwendungen
- 1/8-Schritt Modus: 1600 Schritte pro Umdrehung - sehr sanft, exzellent für Präzisionsarbeit
- 1/16-Schritt Modus: 3200 Schritte pro Umdrehung - extrem sanft, perfekt für Kameras und empfindliche Mechanismen
- 1/32-Schritt Modus: 6400 Schritte pro Umdrehung - ultra-sanfte Bewegung, ideal für die anspruchsvollsten Anwendungen
Hier ist der Kompromiss, den Sie verstehen müssen: Je höher Sie das Mikroschritt-Level setzen, desto sanfter und präziser bewegt sich Ihr Motor, aber Sie benötigen mehr Schritte, um jede Umdrehung zu vollenden. Wenn Sie dieselbe Schritt-Impulsrate (Impulse pro Sekunde) beibehalten, dauert jede Umdrehung länger, was den Motor effektiv verlangsamt. Denken Sie daran wie Treppensteigen versus auf einer Rampe gehen - die Rampe ist sanfter, aber es dauert länger, dieselbe Höhe zu erreichen, wenn Sie dasselbe Tempo beibehalten.
Jedoch, hier ist der aufregende Teil - wenn Ihr Arduino schnell genug Impulse ausgeben kann, um der höheren Schrittanzahl zu entsprechen, können Sie die Geschwindigkeit beibehalten oder sogar erhöhen, während Sie all diese Sanftheit gewinnen! Die praktische Grenze hängt davon ab, wie schnell sowohl der DRV8825 Driver als auch Ihr Arduino diese Impulse verarbeiten können, ohne Schritte zu verlieren. Die meisten Arduino-Projekte können leicht die Impulsraten handhaben, die für exzellente Leistung benötigt werden.
DRV8825 Mikroschritt-Auswahl Pins
Der DRV8825 verfügt über drei Mikroschritt-Auflösung Auswahlpins, die wie digitale Schalter funktionieren: M0, M1 und M2 Pins (einige Module könnten diese als M1, M2, M3 bezeichnen - gleiche Funktionalität, unterschiedliche Nummerierung). Durch Setzen dieser Pins auf verschiedene Kombinationen von HIGH und LOW können Sie aus sechs verschiedenen Mikroschritt-Auflösungen wählen. Es ist wie sechs verschiedene "Sanftheit-Einstellungen" für Ihren Motor zu haben!
| M0 Pin | M1 Pin | M2 Pin | Mikroschritt Auflösung | Motor Verhalten |
|---|---|---|---|---|
| Low | Low | Low | Vollschritt | Meistes Drehmoment, sichtbare Schritte, schnellste Rotation für gegebene Impulsrate |
| High | Low | Low | Halbschritt | Gute Balance aus Sanftheit und Drehmoment |
| Low | High | Low | 1/4 Schritt | Merklich sanfter, immer noch gutes Drehmoment |
| High | High | Low | 1/8 Schritt | Sehr sanfte Bewegung, exzellent für die meisten Projekte |
| Low | Low | High | 1/16 Schritt | Extrem sanft, großartig für Präzisionsanwendungen |
| High | Low | High | 1/32 Schritt | Ultra-sanfte Bewegung, perfekt für empfindliche Arbeit |
| Low | High | High | 1/32 Schritt | Gleich wie oben - mehrere Wege, 1/32 Schritte zu erreichen |
| High | High | High | 1/32 Schritt | Maximale verfügbare Sanftheit |
Hier ist ein hilfreicher Details, das den DRV8825 anfängerfreundlich macht: Diese Mikroschritt-Auswahl Pins kommen mit eingebauten Pull-Down-Widerständen, die sie automatisch standardmäßig in einem LOW-Zustand halten. Das bedeutet, wenn Sie diese Pins mit nichts verbinden, wird Ihr Motor im Vollschritt-Modus arbeiten, was perfekt für den Einstieg und das Testen Ihres Setups ist. Sobald Sie mit der grundlegenden Bedienung vertraut sind, können Sie mit verschiedenen Mikroschritt-Leveln experimentieren, um die perfekte Balance aus Sanftheit, Geschwindigkeit und Drehmoment für Ihr spezifisches Projekt zu finden.
Viele Anfänger starten mit 1/4 oder 1/8 Mikroschritt als optimalen Kompromiss - es bietet viel sanftere Bewegung als der Vollschritt-Modus, ohne extrem hohe Impulsraten von Ihrem Arduino zu erfordern. Mit zunehmender Erfahrung können Sie diese Einstellungen feinabstimmen, um den spezifischen Anforderungen Ihres Projekts zu entsprechen.
Funktionsweise
Das Verständnis, wie der DRV8825 funktioniert, gibt Ihnen das Vertrauen, ihn effektiv in Ihren Projekten zu verwenden, und ehrlich gesagt ist es einfacher als Sie vielleicht erwarten! Im Kern fungiert der DRV8825 als intelligenter Übersetzer zwischen den einfachen digitalen Signalen Ihres Arduino und den komplexen Strommustern, die benötigt werden, um Ihren Schrittmotor präzise zu bewegen.
Um einen Schrittmotor mit dem DRV8825 Modul zu steuern, benötigen Sie mindestens zwei Arduino-Pins: einen für den DIR Pin (Richtung) und einen für den STEP Pin (Bewegung). Der DRV8825 interpretiert diese einfachen digitalen Signale von Ihrem Arduino und wandelt sie in die ausgeklügelte Stromsteuerung um, die benötigt wird, um Ihren Schrittmotor mit Präzision zu bewegen. Es ist wie einen hochqualifizierten Dolmetscher zu haben, der beide Sprachen perfekt versteht!
So funktionieren diese beiden essentiellen Pins:
- STEP Pin: Hier passiert die Magie! Jedes Mal, wenn Sie einen Impuls (LOW zu HIGH Übergang) an den STEP Pin senden, bewegt sich der Motor um einen Mikroschritt oder Vollschritt vorwärts, abhängig von Ihrer Mikroschritt-Konfiguration. Denken Sie daran wie an eine Türklingel - jedes Mal, wenn Sie sie mit einem Impuls "läuten", macht der Motor einen Schritt vorwärts. Je schneller Sie Impulse senden, desto schneller dreht sich der Motor.
- DIR Pin: Dieser Pin ist wunderschön einfach - er bestimmt, in welche Richtung sich Ihr Motor dreht. Setzen Sie ihn auf HIGH für eine Richtung, LOW für die andere Richtung. Das Großartige ist, dass Sie die Richtung sofort ändern können, einfach indem Sie den Zustand dieses Pins ändern, sogar während der Motor läuft!
Der DRV8825 nimmt dann diese einfachen Signale von Ihrem Arduino, kombiniert sie mit seinen internen Mikroschritt-Einstellungen und erzeugt die präzisen Strommuster, die benötigt werden, um die Motorspulen über die 1A, 1B, 2A und 2B Ausgangspins zu energetisieren. Der Driver handhabt automatisch das gesamte komplexe Timing und die Stromsteuerung - Sie konzentrieren sich nur darauf, Schritt-Impulse zu senden und die Richtung zu setzen!
Was wirklich praktisch ist, ist, dass Sie Flexibilität haben, wie Sie die zusätzlichen Steuerungspins am DRV8825 Modul konfigurieren (ENABLE, M1, M2, M3, RESET, SLEEP). Sie können aus drei Ansätzen basierend auf Ihren Projektanforderungen wählen:
- Unverbunden lassen - Dies ist perfekt für Anfänger! Der Driver wird mit vernünftigen Standardeinstellungen arbeiten, und Sie können sich darauf konzentrieren, die Grundlagen zu lernen, ohne sich über komplexe Konfigurationen Sorgen zu machen.
- Fest mit GND oder VCC verdrahten - Dieser Ansatz fixiert einen spezifischen Betriebsmodus, was großartig ist, wenn Sie genau wissen, wie sich Ihr System verhalten soll und Sie die Einstellungen während des Betriebs nicht ändern müssen.
- Mit Arduino-Pins verbinden - Dies gibt Ihnen maximale Flexibilität! Sie können Funktionen wie Mikroschritt-Auflösung, Motor aktivieren/deaktivieren und Sleep-Modus dynamisch in Ihrem Code steuern. Dies ist fantastisch für fortgeschrittene Projekte, wo Sie das Motorverhalten basierend auf verschiedenen Betriebsbedingungen ändern möchten.
Die Schönheit dieses Designs ist, dass Sie einfach mit nur den STEP und DIR Verbindungen beginnen können, sich mit der grundlegenden Motorsteuerung vertraut machen und dann nach und nach ausgeklügeltere Funktionen hinzufügen können, während Ihr Vertrauen und Ihre Projektanforderungen wachsen. Es ist eine perfekte Lernprogression, die Anfänger nicht überfordert, während sie dennoch professionelle Fähigkeiten für fortgeschrittene Anwendungen bietet.
Schaltplan zwischen Arduino, DRV8825 Modul und Schrittmotor
Lassen Sie uns nun alles verbinden! Keine Sorge - die Verkabelung ist viel einfacher als es zunächst aussehen mag. Wir beginnen mit den minimalen Verbindungen, die benötigt werden, um Ihren Schrittmotor zum Drehen zu bringen, was perfekt ist, um die Grundlagen zu lernen, bevor Sie zu fortgeschritteneren Konfigurationen übergehen.
Der folgende Schaltplan zeigt Ihnen genau, wie Sie Ihren Arduino, das DRV8825 Modul und den Schrittmotor für den grundlegenden Betrieb verbinden. Mit diesem Setup wird der DRV8825 Driver in seinem Standard-Vollschritt-Modus arbeiten, was ideal ist, um zu beginnen und sicherzustellen, dass alles korrekt funktioniert.
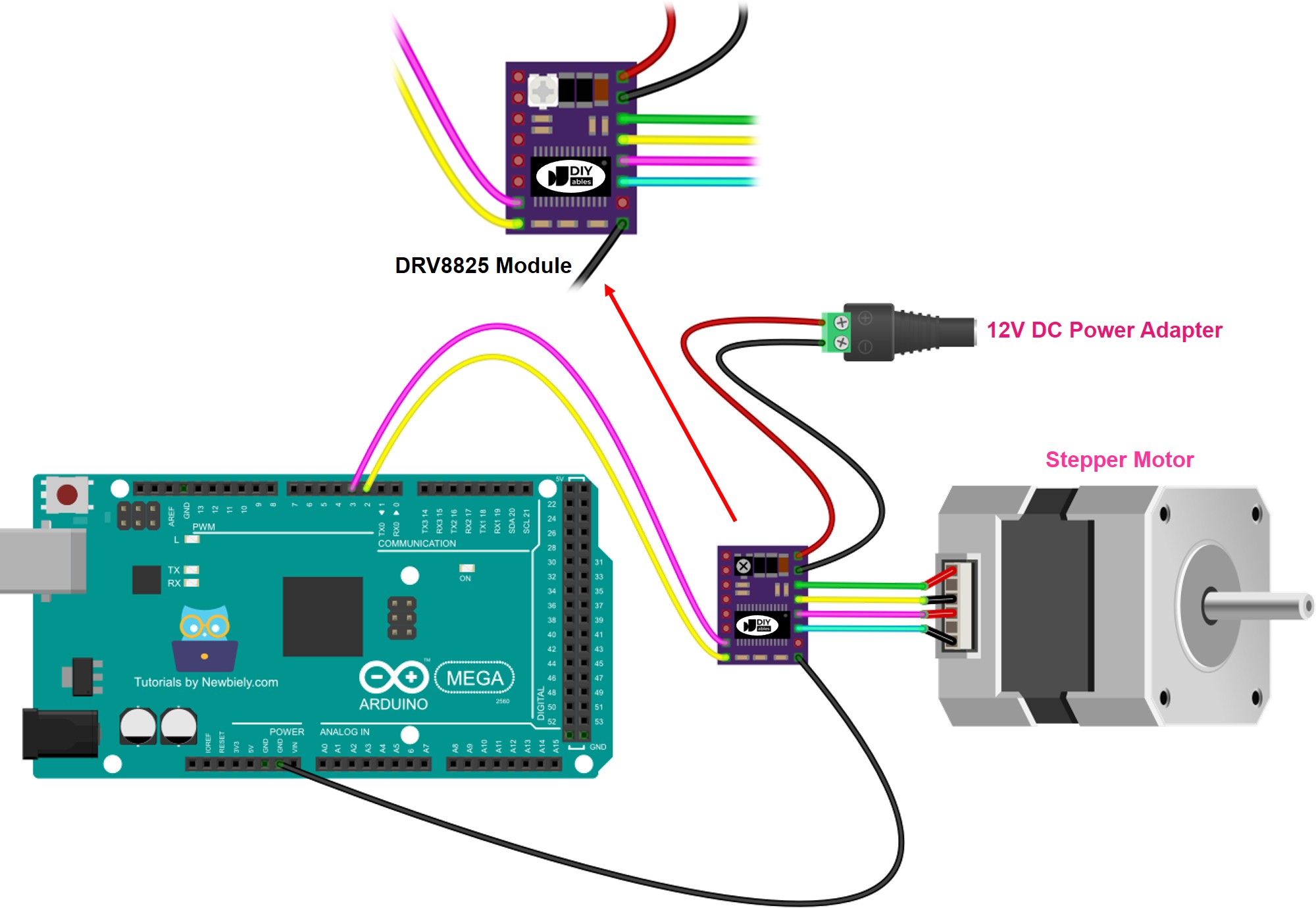
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
Wichtiger Sicherheitshinweis: Während diese grundlegende Verkabelung Ihren Motor zum Laufen bringt, überprüfen Sie immer doppelt, dass Ihre Netzteilspannung den Spezifikationen Ihres Schrittmotors entspricht. Der DRV8825 kann 8,2V bis 45V verarbeiten, aber Ihr spezifischer Schrittmotor kann andere Anforderungen haben. Die Verwendung einer falschen Spannung kann Ihren Motor beschädigen oder seine Leistung erheblich reduzieren.
Hier sind die essentiellen Verbindungen im Detail erklärt:
| Bauteil-Pin | Arduino/Strom Verbindung | Zweck |
|---|---|---|
| VMOT | Motor-Stromversorgung Positiv (12V) | Stellt die hochstromige Leistung bereit, die benötigt wird, um Ihren Schrittmotor anzutreiben |
| GND (Motor) | Motor-Stromversorgung Masse | Vervollständigt den Motor-Stromkreis - wesentlich für ordnungsgemäße Funktion |
| 1A, 1B | Schrittmotor Spule A | Diese Pins steuern ein Paar von Motorwicklungen mit präzisen Strommustern |
| 2A, 2B | Schrittmotor Spule B | Diese Pins steuern das zweite Paar von Motorwicklungen, um Rotation zu erzeugen |
| STEP | Arduino Digital Pin D4 | Jeder Impuls an diesem Pin bewegt den Motor um einen Schritt vorwärts |
| DIR | Arduino Digital Pin D3 | Steuert Rotationsrichtung - HIGH für eine Richtung, LOW für die andere |
| GND (Logik) | Arduino GND Pin | Kritische Verbindung, die sicherstellt, dass Arduino und Driver ordnungsgemäß kommunizieren |
| Andere Pins | Unverbunden gelassen | Driver verwendet Standardeinstellungen - perfekt für den Einstieg |
Nehmen Sie sich Zeit mit diesen Verbindungen und überprüfen Sie jede einzelne doppelt, bevor Sie Ihr System einschalten. Der häufigste Anfängerfehler ist, die Logik-Masse-Verbindung zwischen Arduino und DRV8825 zu vergessen, was zu unregelmäßigem Verhalten oder überhaupt keiner Bewegung führen kann. Denken Sie daran, diese Masse-Verbindung ist das, was Ihrem Arduino und dem Driver ermöglicht, "dieselbe Sprache zu sprechen!"
Ein weiteres wicht