Arduino Mega - Stepper Motor mit L298N Driver steuern
Bereit zu lernen, wie Sie Schrittmotoren mit Ihrem Arduino steuern? Sie sind hier genau richtig! Dieses umfassende Tutorial führt Sie durch alles, was Sie über die Verwendung eines L298N Drivers zur Steuerung bipolarer Schrittmotoren wissen müssen. Ob Sie einen 3D-Drucker, Roboter oder ein automatisiertes Positionierungssystem bauen - die Beherrschung der Schrittmotorsteuerung eröffnet Ihnen eine Welt präziser Bewegungsmöglichkeiten.
Machen Sie sich keine Sorgen, falls Sie neu bei Schrittmotoren sind – sie mögen zunächst komplex erscheinen, aber mit der richtigen Anleitung werden Sie feststellen, dass sie unglaublich nützlich und überraschend einfach zu handhaben sind. Im Gegensatz zu normalen DC-Motoren, die kontinuierlich drehen, bewegen sich Schrittmotoren in präzisen, kontrollierten Schritten, was sie perfekt für Anwendungen macht, bei denen Sie exakte Positionierung und wiederholbare Bewegungen benötigen.
In diesem praxisorientierten Tutorial behandeln wir alles von der Grundverdrahtung bis zu fortgeschrittenen Programmiertechniken. Sie lernen, wie Sie Positionen mit punktgenauer Präzision steuern, Geschwindigkeit und Beschleunigung gleichmäßig anpassen und mühelos die Richtung wechseln. Wir verwenden den beliebten NEMA 17 Schrittmotor als Beispiel, aber die Prinzipien gelten für jeden 4-Draht bipolaren Schrittmotor, dem Sie in Ihren Projekten begegnen könnten.
Am Ende dieses Tutorials haben Sie das Vertrauen, Schrittmotoren in Ihre eigenen kreativen Projekte zu integrieren. Von automatisierten Kamera-Slidern bis zu präzisen CNC-Maschinen werden die hier erlernten Fähigkeiten als Grundlage für unzählige aufregende Projekte dienen. Lassen Sie uns eintauchen und präzise Bewegung in Ihre Arduino Mega Projekte bringen!
In diesem Tutorial lernen wir:
- Wie Sie den L298N Driver zur Steuerung bipolarer Schrittmotoren verwenden
- Wie Sie die Position des Schrittmotors steuern
- Wie Sie die Geschwindigkeit des Schrittmotors steuern
- Wie Sie die Richtung des Schrittmotors steuern
Das Tutorial kann auf jede Art von bipolarem Schrittmotor (4 Drähte) angewendet werden. Das Tutorial verwendet den NEMA 17 Schrittmotor als Beispiel.
Benötigte Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Über Schrittmotoren
Schrittmotoren sind faszinierende Geräte, die elektrische Impulse in präzise mechanische Rotation umwandeln. Denken Sie an sie als die ultimativen Präzisionswerkzeuge der Motorenwelt – anstatt frei zu drehen wie normale DC-Motoren, bewegen sie sich in exakten, wiederholbaren Schritten. Dies macht sie absolut perfekt für Anwendungen, bei denen Sie jederzeit genau wissen müssen, wo sich Ihr Motor befindet.
Es gibt zwei beliebte Arten von Schrittmotoren, die Sie in Ihren Arduino Mega Projekten antreffen werden:
- Bipolare Schrittmotoren: Diese Motoren haben 4 Drähte und bieten ausgezeichnetes Drehmoment und Präzision. Sie sind der Typ, auf den wir uns in diesem Tutorial konzentrieren werden, da sie unglaublich vielseitig und weit verbreitet in allem von 3D-Druckern bis zu Roboterarmen verwendet werden.
- Unipolare Schrittmotoren: Diese haben entweder 5 oder 6 Drähte und sind etwas einfacher zu steuern, bieten aber typischerweise weniger Drehmoment als ihre bipolaren Verwandten.
Hier ist ein hilfreicher Tipp: Wenn Sie einen 6-Draht unipolaren Schrittmotor herumliegen haben, haben Sie Glück! Sie können tatsächlich vier der sechs Drähte verwenden und ihn genau wie einen bipolaren Schrittmotor steuern. Dies gibt Ihnen mehr Flexibilität bei der Komponentenwahl und hilft Ihnen, das Beste aus dem zu machen, was Sie in Ihrer Teilesammlung haben.
Für 5-Draht unipolare Schrittmotor-Projekte haben wir ein spezielles Tutorial zum Arduino Mega - 28BYJ-48 Schrittmotor mit ULN2003 Driver steuern. Aber heute tauchen wir tief in bipolare Schrittmotoren ein, weil sie überlegene Leistung bieten und unglaublich beliebt in seriösen Maker-Projekten sind.
Was bipolare Schrittmotoren besonders macht, ist ihr interner Aufbau mit zwei Spulen (genannt Phasen), die Magnetfelder erzeugen. Durch die Energetisierung dieser Spulen in bestimmten Sequenzen können wir die Motorwelle in präzisen Schritten drehen lassen. Diese Kontrollebene macht sie unverzichtbar für Anwendungen, die präzise Positionierung erfordern, wie Kamera-Gimbals, automatisierte Teleskop-Halterungen oder Präzisions-Messgeräte.
Bipolare Schrittmotor Pinbelegung
Das Verständnis der Pinbelegung ist einfacher als es aussieht! Keine Sorge – sobald Sie das Muster sehen, wird das Anschließen Ihres Schrittmotors zur zweiten Natur. Der bipolare Schrittmotor hat 4 Pins, die den zwei internen Spulen entsprechen. Je nach Hersteller haben die Motor-Pins verschiedene Benennungskonventionen, aber sie beziehen sich alle auf das gleiche Grundkonzept.
Die folgende Tabelle zeigt einige weit verbreitete Pin-Benennungskonventionen, denen Sie begegnen werden:
| PIN NR | Benennung 1 | Benennung 2 | Benennung 3 |
|---|---|---|---|
| 1 | A+ | A | A |
| 2 | A- | A | C |
| 3 | B+ | B | B |
| 4 | B- | B | D |
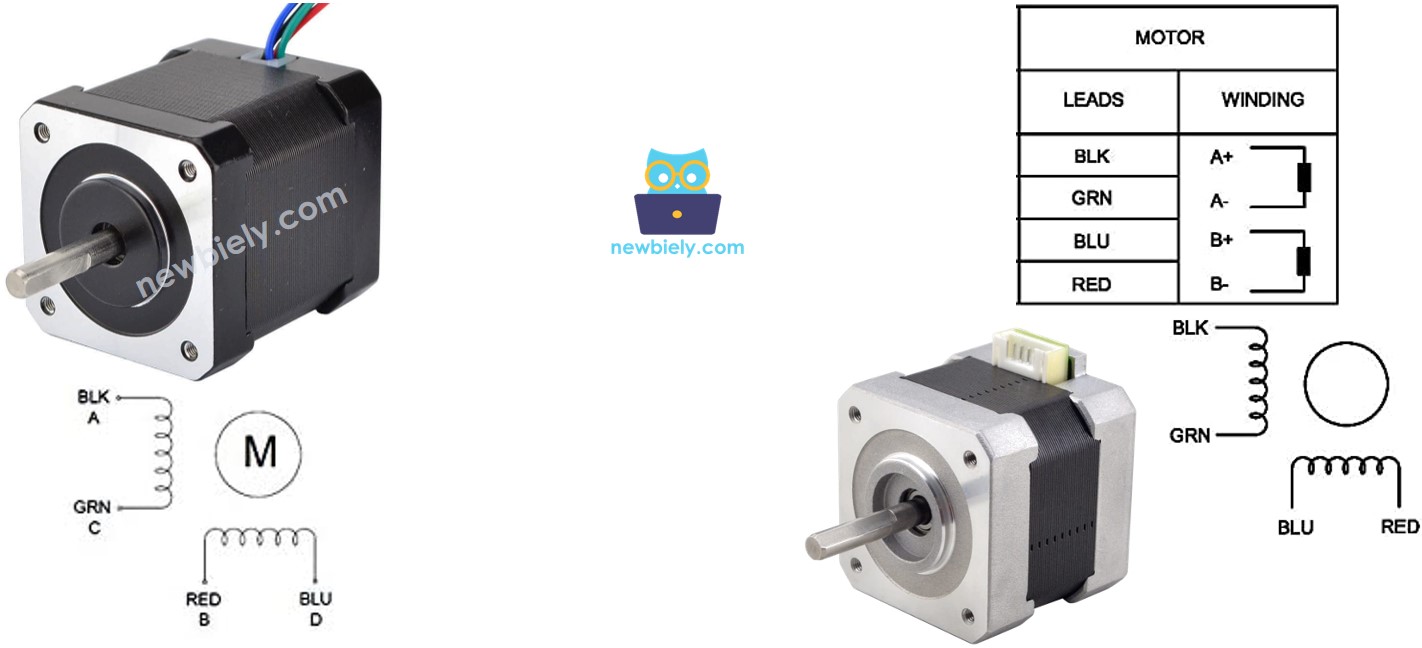
Hier ist etwas Wichtiges zu beachten: Die Reihenfolge der Pins, Draht-Benennung und Drahtfärbung können zwischen den Herstellern erheblich variieren. Das mag zunächst verwirrend erscheinen, aber lassen Sie sich davon nicht entmutigen! Der Schlüssel ist, immer das Datenblatt oder Handbuch zu überprüfen, das mit Ihrem spezifischen Motor geliefert wird. Denken Sie daran wie an ein Farbcodiersystem – sobald Sie wissen, welche Farbe zu welcher Spule gehört, sind Sie startklar.
Das obige Bild zeigt die Spezifikationen zweier verschiedener Motoren mit unterschiedlicher Draht-Benennung und Drahtfärbung. Beachten Sie, wie die gleichen elektrischen Verbindungen völlig unterschiedliche Farbschemata haben können? Deshalb ist das Lesen der Dokumentation so wichtig – es erspart Ihnen Rätselraten und potentielle Frustration später.
Profi-Tipp: Wenn Sie einen neuen Schrittmotor bekommen, nehmen Sie sich einen Moment Zeit, um die Spulenpaare mit einem Multimeter zu identifizieren. Überprüfen Sie einfach die Durchgängigkeit zwischen den Drähten – Drähte, die Durchgängigkeit zeigen, gehören zur gleichen Spule. Dieser einfache Test kann Ihnen viel Fehlerbehebungszeit sparen!
Schritte pro Umdrehung
Das Verständnis der Schritte pro Umdrehung ist entscheidend für präzise Positionierung in Ihren Arduino Mega Schrittmotor-Projekten. Jeder Schrittmotor hat eine Spezifikation, die Ihnen den Grad pro Schritt angibt (nennen wir dies DEG_PER_STEP), was wie die "Auflösung" des Motors ist – wie fein er sich bewegen kann. Die Schönheit von Schrittmotoren liegt darin, dass Sie sie mit verschiedenen Methoden steuern können, um unterschiedliche Präzisionsebenen zu erreichen.
Die Motorspezifikation gibt den Grad pro Schritt an (nennen wir dies DEG_PER_STEP). Je nach Steuerungsmethode werden die Schritte pro Umdrehung (nennen wir dies STEP_PER_REVOLUTION) wie in der folgenden Tabelle berechnet:
| Steuerungsmethode | Schritte pro Umdrehung | Echter Grad pro Schritt |
|---|---|---|
| Vollschritt | STEP_PER_REVOLUTION = 360 / DEG_PER_STEP | DEG_PER_STEP |
| Halbschritt | STEP_PER_REVOLUTION = (360 / DEG_PER_STEP) * 2 | DEG_PER_STEP / 2 |
| Mikroschritt (1/n) | STEP_PER_REVOLUTION = (360 / DEG_PER_STEP) * n | DEG_PER_STEP / n |
Lassen Sie mich das mit einem praktischen Beispiel aufschlüsseln, dem Sie häufig begegnen werden. Die meisten NEMA 17 Schrittmotoren (die üblicherweise in 3D-Druckern verwendet werden) haben eine Spezifikation von 1,8 Grad pro Schritt. So funktioniert die Mathematik:
| Steuerungsmethode | Schritte pro Umdrehung | Echter Grad pro Schritt |
|---|---|---|
| Vollschritt | 200 Schritte/Umdrehung | 1,8° |
| Halbschritt | 400 Schritte/Umdrehung | 0,9° |
| Mikroschritt (1/n) | (200 * n) Schritte/Umdrehung | (1,8 / n)° |
Diese Flexibilität ist es, was Schrittmotoren so mächtig macht! Wollen Sie gleichmäßige, präzise Bewegung für einen Kamera-Slider? Verwenden Sie Mikrostepping. Benötigen Sie maximales Drehmoment zum Heben schwerer Gegenstände? Der Vollschritt-Modus gibt Ihnen die meiste Haltekraft. Die Wahl liegt bei Ihnen, basierend auf den spezifischen Anforderungen Ihres Projekts.
Wie man einen Schrittmotor mit Arduino steuert
Hier wird es aufregend – Ihr Arduino Mega ist perfekt in der Lage, die präzisen Timing-Signale zu erzeugen, die zur Steuerung von Schrittmotoren benötigt werden. Es gibt jedoch eine wichtige Überlegung: Die Steuersignale von Ihrem Arduino, obwohl perfekt getimed, haben nicht genug Spannung und Strom, um den Schrittmotor direkt anzutreiben. Denken Sie an Ihr Arduino Mega als das "Gehirn", das genau weiß, wann Signale gesendet werden sollen, aber es braucht etwas "Muskelkraft", um den Motor tatsächlich zum Bewegen zu bringen.
Hier wird ein Hardware-Driver unerlässlich. Der Driver fungiert wie ein intelligenter Verstärker, der zwei kritische Aufgaben für Ihr Schrittmotor Arduino Mega Projekt übernimmt:
- Signalverstärkung: Er nimmt die schwachen Steuersignale von Ihrem Arduino Mega und verstärkt sie auf die Spannungs- und Stromebenen, die Ihr Schrittmotor für effektiven Betrieb benötigt.
- Schutz: Er schafft eine Schutzbarriere zwischen Ihrem empfindlichen Arduino Mega und den hohen Strom-/Spannungsanforderungen des Schrittmotors und verhindert elektrische Schäden an Ihrem Mikrocontroller.
Es gibt viele verschiedene Arten von Hardware-Drivern zur Steuerung von Schrittmotoren verfügbar, jeder mit seinen eigenen Vorteilen. Einige sind für Hochpräzisionsanwendungen entwickelt, andere für Hochleistungsmotoren und manche priorisieren die Benutzerfreundlichkeit für Anfänger. Der L298N Driver schlägt eine ausgezeichnete Balance – er ist kraftvoll genug für die meisten Projekte, bezahlbar, weit verbreitet und anfängerfreundlich.
Der L298N Driver ist besonders beliebt in der Arduino Mega Community, weil er Spannungen bis zu 35V und Ströme bis zu 2A pro Kanal handhaben kann, was ihn für eine breite Palette von Schrittmotoren geeignet macht. Außerdem ist er unglaublich verzeihend und robust, was bedeutet, dass Sie ihn beim Lernen weniger wahrscheinlich versehentlich beschädigen.
Über den L298N Driver
Der L298N Driver ist der beste Freund Ihres Schrittmotors und eine fantastische Wahl für Arduino Mega Projekte! Dieses vielseitige Modul ist wie ein professioneller Motorcontroller in einem kompakten, bezahlbaren Paket. Was ihn wirklich besonders macht, ist sein Doppelzweck-Design – ein einzelner L298N Driver kann entweder zwei separate DC-Motoren ODER einen Schrittmotor steuern, was Ihnen unglaubliche Flexibilität in Ihren Projekten gibt.
In diesem Tutorial konzentrieren wir uns auf die Verwendung des L298N zur Steuerung von Schrittmotoren, aber es ist erwähnenswert zu wissen, dass Sie denselben Driver später leicht für andere motorbasierte Projekte wiederverwenden könnten. Denken Sie daran als Investition in Ihre Komponentenbibliothek, die Ihnen über mehrere Projekte hinweg gute Dienste leisten wird.
Der L298N sticht hervor, weil er ernsthafte Leistungsanforderungen bewältigen kann – bis zu 35V und 2A pro Kanal – was die meisten Hobby- und sogar semi-professionelle Anwendungen abdeckt. Ob Sie eine Desktop-CNC-Maschine, einen Kamera-Dolly oder ein Präzisions-Positionierungssystem bauen, dieser Driver hat die Kraft, die Arbeit zuverlässig zu erledigen.
L298N Driver Pinbelegung
Schauen wir uns die Pinbelegung an – keine Sorge, es ist einfacher als es aussieht! Das Verständnis dieser Verbindungen ist der Schlüssel, um Ihr Schrittmotor-Projekt zum Laufen zu bringen. Sobald Sie verstehen, was jeder Pin macht, wird das Verbinden von allem unkompliziert und logisch.
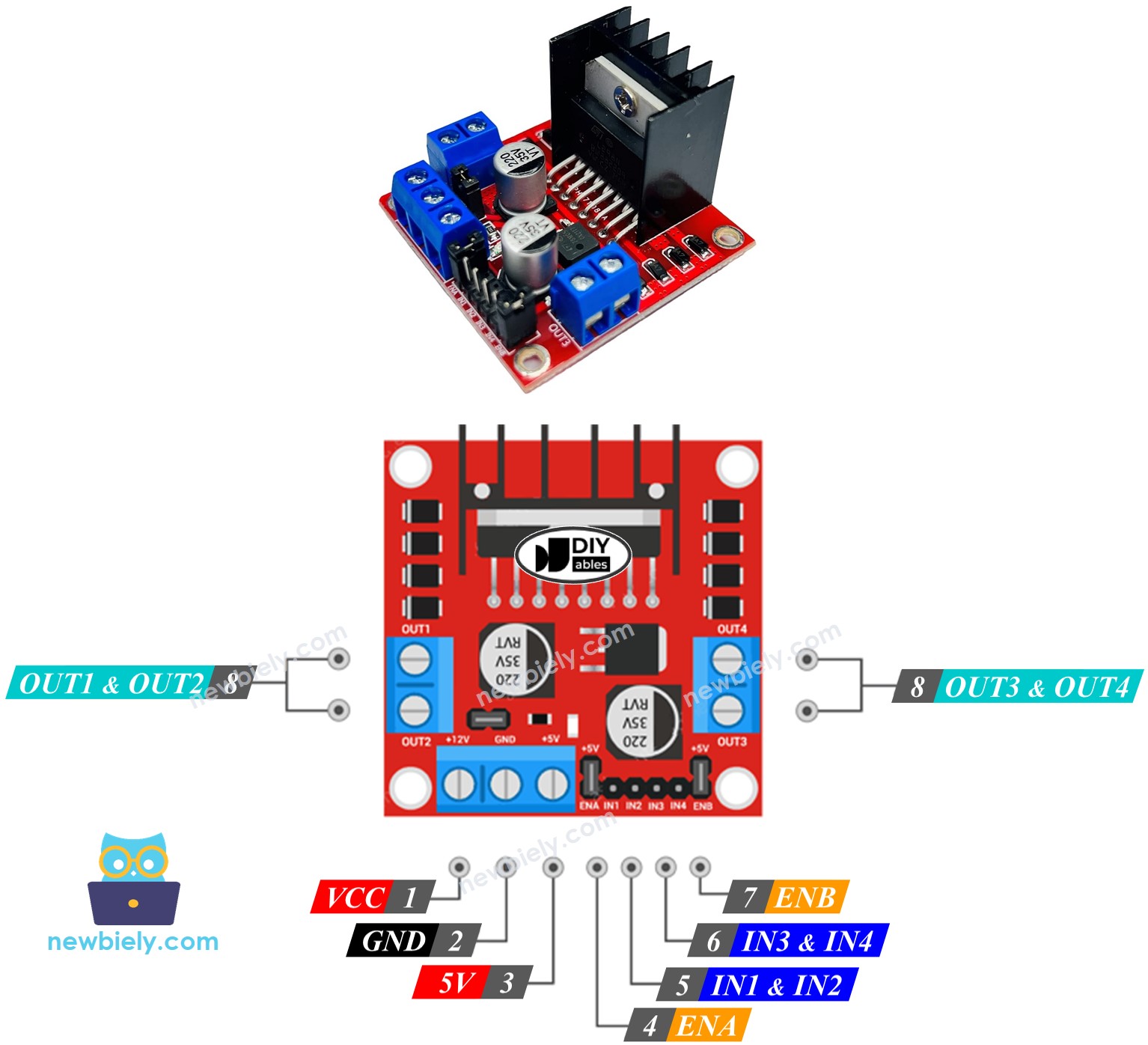
Der L298N Driver hat 11 Pins und drei Jumper, die zusammenarbeiten, um Ihnen vollständige Kontrolle über Ihren Schrittmotor zu geben. Lassen Sie mich Sie durch jeden einzelnen führen, damit Sie sich beim Herstellen dieser Verbindungen sicher fühlen:
Stromversorgungspins:
- VCC Pin: Dies ist der Hauptstromversorgungspin für Ihren Schrittmotor. Verbinden Sie diesen mit Ihrem externen Netzteil, das zwischen 5V bis 35V sein kann, je nach den Anforderungen Ihres Motors. Die meisten NEMA 17 Motoren funktionieren großartig mit 12V.
- GND Pin: Dies ist Ihre gemeinsame Masseverbindung, die sowohl mit der GND (0V) Ihres Arduino Mega als auch des Netzteils verbunden werden muss. Denken Sie daran als den elektrischen "Referenzpunkt" für Ihre gesamte Schaltung.
- 5V Pin: Dieser versorgt die internen Logikschaltungen des L298N Moduls mit Strom. Sie können diesen mit dem 5V Ausgang Ihres Arduino verbinden, oder wenn Sie den 5V-EN Jumper an Ort und Stelle lassen, bekommt er automatisch Strom vom VCC Eingang.
Steuersignal-Pins:
- IN1, IN2, IN3, IN4 Pins: Dies sind Ihre Steuereingangspins, die direkt mit den digitalen Pins Ihres Arduino verbunden werden. Ihr Arduino Mega sendet Timing-Signale durch diese Pins, um dem Driver genau zu sagen, wann jede Spule Ihres Schrittmotors energetisiert werden soll. Es ist wie eine direkte Kommunikationsleitung zwischen dem Gehirn Ihres Arduino und der Muskelkraft des Motor-Drivers.
Motor-Ausgangspins:
- OUT1, OUT2, OUT3, OUT4 Pins: Dies sind die Hochleistungs-Ausgangspins, die direkt mit den vier Drähten Ihres Schrittmotors verbunden werden. Der Driver verwendet diese, um die verstärkten Signale zu senden, die Ihren Motor tatsächlich zum Bewegen bringen.
Enable- und Steuerungs-Jumper:
- ENA, ENB Jumper: Diese kleinen Jumper sind wie Ein-/Ausschalter für die Motorsteuerung. Lassen Sie sowohl die ENA- als auch ENB-Jumper an Ort und Stelle, um Ihren Schrittmotor zu aktivieren. Ihr Entfernen würde die Motorausgänge deaktivieren.
- 5V-EN Jumper: Dieser Jumper bestimmt, wie das Modul seine Logikstromversorgung erhält. Lassen Sie ihn für einfache Projekte an Ort und Stelle (Strom kommt von VCC), oder entfernen Sie ihn, wenn Sie 5V separat für erweiterte Energieverwaltung bereitstellen möchten.
Profi-Tipp: Für die meisten Arduino Mega Schrittmotor-Projekte können Sie alle drei Jumper an Ort und Stelle lassen und sich auf das Verbinden der Haupt-Strom-, Steuer- und Motor-Drähte konzentrieren. Das hält die Dinge einfach, während Sie lernen!
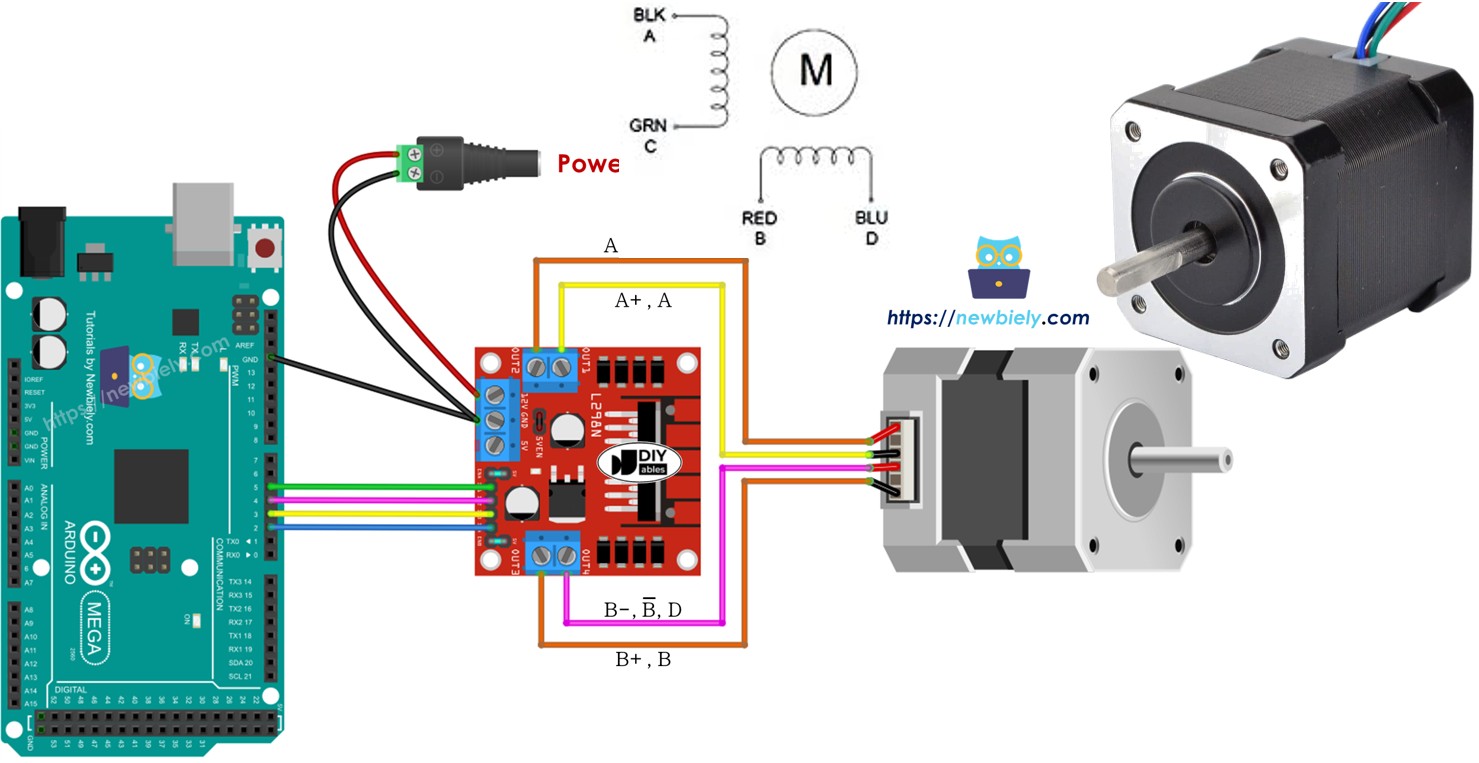
Schaltplan
Jetzt zum aufregenden Teil – lassen Sie uns alles miteinander verbinden! Die Verkabelung mag auf den ersten Blick komplex aussehen, aber ich verspreche, sie ist unkomplizierter als sie erscheint. Nehmen Sie sich Zeit mit diesen Verbindungen und überprüfen Sie jeden Draht, bevor Sie Ihr Projekt unter Strom setzen.
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
Wichtiger Sicherheitshinweis: Bitte stellen Sie sicher, dass Sie alle Ihre Verbindungen doppelt überprüfen, bevor Sie Strom anlegen. Obwohl der L298N Driver ziemlich robust ist, können falsche Verkabelungen sowohl Ihr Arduino Mega als auch den Motor-Driver beschädigen. Es ist immer besser, eine zusätzliche Minute mit der Überprüfung der Verbindungen zu verbringen als mit verbrannten Komponenten umzugehen!
※ Notiz:
- Bitte lassen Sie alle drei Jumper am L298N Modul an Ort und Stelle (falls die Motorstromversorgung ≤ 12V ist)
- Die Reihenfolge der Pins an Schrittmotoren kann zwischen Herstellern variieren. Bitte überprüfen Sie die untenstehende Tabelle für die korrekte Verkabelung.
Verkabelungstabelle zwischen Arduino Mega und L298N Driver
Diese Verbindungen schaffen den Kommunikationsweg zwischen dem Gehirn Ihres Arduino und der Steuerlogik des L298N:
| Arduino Mega Pins | L298N Pins |
|---|---|
| 5 | IN1 |
| 4 | IN2 |
| 3 | IN3 |
| 2 | IN4 |
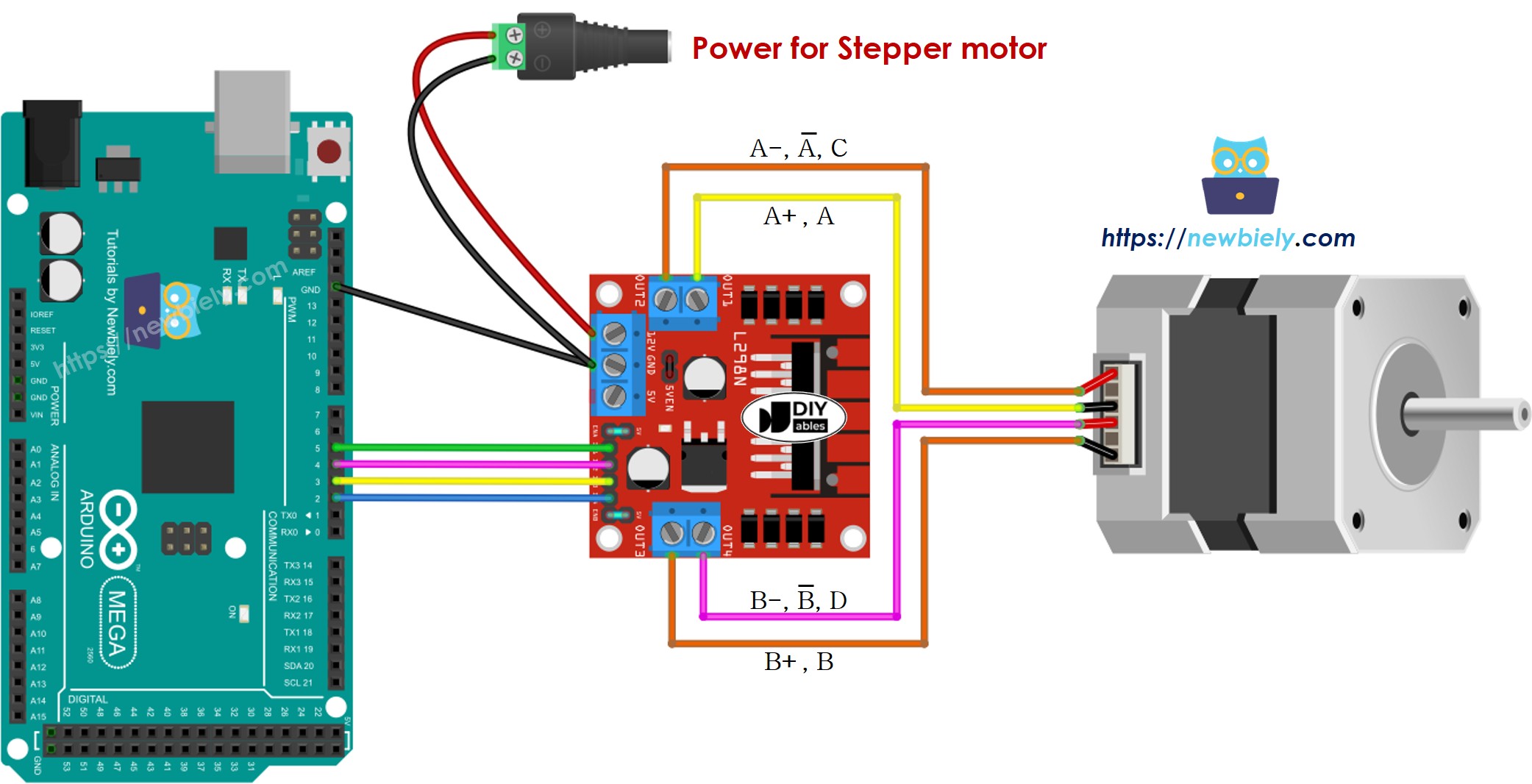
Verkabelungstabelle zwischen L298N Driver und Schrittmotor
Wichtig! Hier müssen Sie besonders aufpassen: Bitte verlassen Sie sich nicht nur auf die Drahtreihenfolge, die im Schaltplan oben gezeigt wird. Es ist nur ein visuelles Beispiel, und die tatsächliche Pin-Reihenfolge an Ihrem Schrittmotor kann je nach Hersteller völlig anders sein. Das ist die häufigste Verwirrungsquelle für Anfänger, aber sobald Sie es richtig hinbekommen, wird Ihr Motor wunderbar funktionieren!
Der Schlüssel ist, die Spulenpaare korrekt zu verbinden. Stellen Sie sicher, dass Ihre Verkabelung dieser logischen Verbindungstabelle folgt:
| L298N Pins | Schrittmotor Pins | Oder | Oder |
|---|---|---|---|
| OUT1 | A+ | A | A |
| OUT2 | A- | A | C |
| OUT3 | B+ | B | B |
| OUT4 | B- | B | D |
Bevor Sie einen Schrittmotor kaufen, empfehle ich dringend, das Datenblatt, die Spezifikation oder das Handbuch zu überprüfen, das damit geliefert wird. Qualitätshersteller stellen immer die Zuordnung zwischen Drahtfarben und Spulennamen zur Verfügung. Zum Beispiel stellt dieser Schrittmotor eine klare Zuordnung zur Verfügung, wie im Bild unten gezeigt:
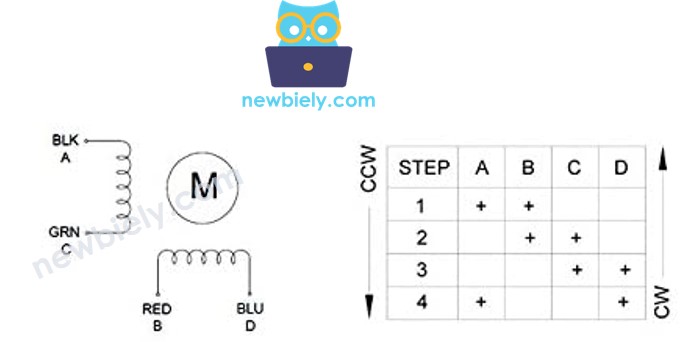
Basierend auf dieser spezifischen Zuordnung wird Ihre Verkabelungstabelle viel klarer:
| L298N Pins | Schrittmotor Pins | Drahtfarbe |
|---|---|---|
| OUT1 | A | schwarzer Draht |
| OUT2 | C | grüner Draht |
| OUT3 | B | roter Draht |
| OUT4 | D | blauer Draht |
※ Notiz:
Hier ist ein hilfreicher Tipp: In allen Verkabelungstabellen oben können Sie tatsächlich OUT1 mit OUT2 oder OUT3 mit OUT4 vertauschen, und Ihr Motor wird immer noch perfekt funktionieren! Wenn Sie diese Vertauschungen vornehmen, könnte sich jedoch die Rotationsrichtung des Motors umkehren (im Uhrzeigersinn wird gegen den Uhrzeigersinn und umgekehrt). Das kann tatsächlich nützlich sein, wenn Sie die Richtung ändern müssen, ohne Ihren Code zu modifizieren!
Wie man einen Schrittmotor mit einem L298N Driver steuert
Jetzt zum spaßigen Teil – lassen Sie uns Ihr Schrittmotor-Projekt mit Code zum Leben erwecken! Machen Sie sich keine Sorgen, falls Sie neu in der Schrittmotor-Programmierung sind; wir werden alles Schritt für Schritt durchgehen. Die Schönheit der Arbeit mit Arduino Mega liegt darin, dass es ausgezeichnete Bibliotheken gibt, die alle komplexen Timing-Berechnungen für Sie übernehmen.
Die manuelle Steuerung eines Schrittmotors wäre ziemlich herausfordernd – Sie müssten präzise Timing-Sequenzen verwalten, Beschleunigungskurven handhaben und mehrere Pins gleichzeitig koordinieren. Glücklicherweise macht es die fantastische AccelStepper Bibliothek dank der erstaunlichen Arduino-Community nicht nur handhabbar, Schrittmotoren zu steuern, sondern sogar angenehm!
Ein Wort zur Bibliotheksauswahl: Arduino IDE enthält eine eingebaute Stepper Bibliothek, aber wir empfehlen dringend, sie für ernsthafte Projekte zu vermeiden. Hier ist, warum die eingebaute Bibliothek zu kurz greift:
- Blockierende Operation: Die Bibliothek bietet nur blockierende Funktionen, was bedeutet, dass Ihr Arduino Mega nichts anderes tun kann, während es den Schrittmotor steuert. Dies begrenzt die Fähigkeiten Ihres Projekts erheblich.
- Eingeschränkte Funktionalität: Es fehlen wesentliche Funktionen wie Beschleunigungssteuerung, gleichmäßige Geschwindigkeitsänderungen und erweiterte Positionierungsfunktionen, die Ihre Projekte professionell erscheinen lassen.
Stattdessen empfehlen wir enthusiastisch die AccelStepper Bibliothek, die wie ein professioneller Motorcontroller in Ihren Code eingebaut ist. Diese unglaubliche Bibliothek bietet:
- Gleichmäßige Beschleunigung und Verzögerung: Ihre Motoren starten und stoppen elegant, reduzieren mechanischen Stress und eliminieren ruckartige Bewegungen.
- Nicht-blockierender Betrieb: Ihr Arduino Mega kann den Schrittmotor steuern, während es gleichzeitig Sensoren liest, Displays aktualisiert oder Benutzereingaben behandelt.
- Mehrmotor-Unterstützung: Steuern Sie mehrere Schrittmotoren gleichzeitig mit unabhängigen Geschwindigkeiten und Positionen.
- Vollschritt- und Halbschritt-Unterstützung: Wählen Sie die richtige Balance zwischen Drehmoment und Gleichmäßigkeit für Ihre Anwendung.
Hinweis: Die AccelStepper Bibliothek unterstützt kein Mikrostepping, aber für die meisten Arduino Mega Projekte bieten die Vollschritt- und Halbschritt-Modi ausgezeichnete Leistung und Präzision.
Wie man die Position des Schrittmotors über L298N Driver steuert
Die Positionierung Ihres Schrittmotors ist unglaublich unkompliziert mit der AccelStepper Bibliothek. Denken Sie daran, als würden Sie Ihrem Motor sagen "gehe zu diesem exakten Punkt" – und er wird sich dorthin gleichmäßig und präzise bewegen:
Die Schönheit dieses Ansatzes liegt darin, dass Sie in absoluten Positionen denken, anstatt zu versuchen, Schritte manuell zu zählen. Wollen Sie sich genau eine vollständige Umdrehung bewegen? Berechnen Sie einfach die Schritte pro Umdrehung und verwenden Sie diese Zahl. Müssen Sie zu Ihrer Startposition zurückkehren? Verwenden Sie einfach moveTo(0).
Wichtige Hinweise für den Erfolg:
Die stepper.moveTo() Funktion ist nicht-blockierend, was fantastisch für die Erstellung responsiver, multitaskingfähiger Arduino Mega Projekte ist. Diese mächtige Funktion kommt jedoch mit einigen wichtigen Überlegungen, die sicherstellen, dass Ihr Schrittmotor perfekt funktioniert:
- Rufen Sie stepper.run() häufig auf: Diese Funktion muss so oft wie möglich aufgerufen werden, idealerweise in Ihrer loop() Hauptfunktion. Denken Sie daran, als würden Sie Ihrem Motor regelmäßige "Herzschläge" geben, um ihn gleichmäßig am Laufen zu halten.
- Vermeiden Sie delay() während der Motor sich bewegt: Die delay() Funktion stoppt Ihr gesamtes Arduino Mega Programm und verhindert, dass stepper.run() aufgerufen wird. Dies macht Ihre Motorbeweg