Raspberry Pi - Keypad - Servo Motor
Dieses Tutorial zeigt Ihnen, wie Sie den Raspberry Pi und ein Keypad verwenden, um einen Servo Motor zu steuern. Im Detail:
- Wenn ein autorisiertes Passwort auf dem Keypad eingegeben wird, rotiert der Raspberry Pi den Servo Motor auf 90°.
- Nach einer bestimmten Zeit rotiert der Raspberry Pi den Servo Motor zurück auf 0°.
Der Code für den Raspberry Pi erlaubt auch die Verwendung mehrerer Passwörter.
Benötigte Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Kaufhinweis: Falls Sie mehrere Servomotoren verwenden möchten, empfehlen wir die Verwendung des PCA9685 16 Channel PWM Servo Driver Module, um MCU-Pins zu sparen und die Verdrahtung zu vereinfachen.
Über Keypad und Servo Motor
Falls Sie nicht mit Keypad und Servo Motor vertraut sind (einschließlich Pinout, Funktionalität, Programmierung usw.), können Ihnen die folgenden Tutorials helfen:
- Raspberry Pi - Keypad Tutorial
- Raspberry Pi - Servo Motor Tutorial
Verdrahtungsdiagramm
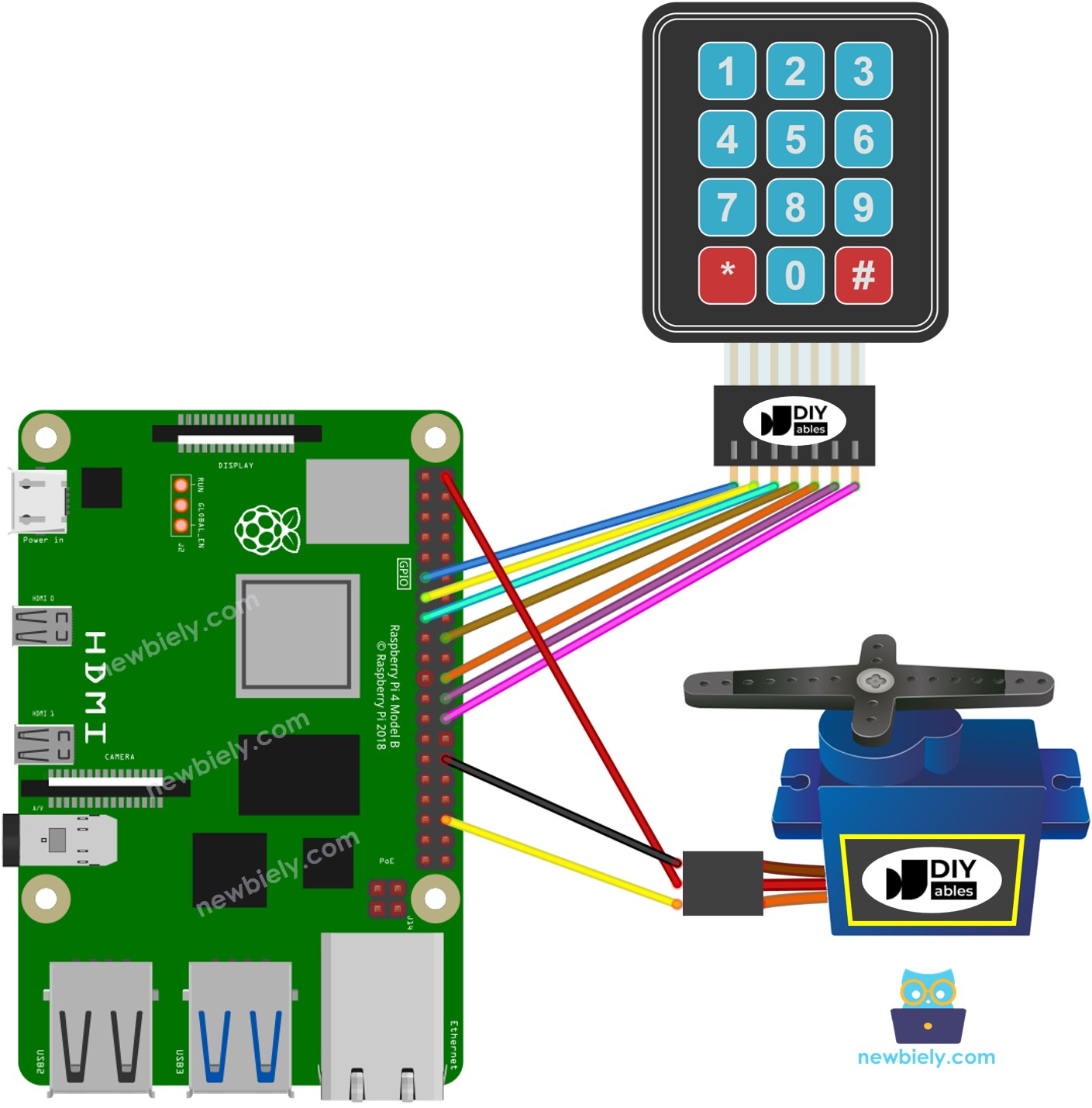
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
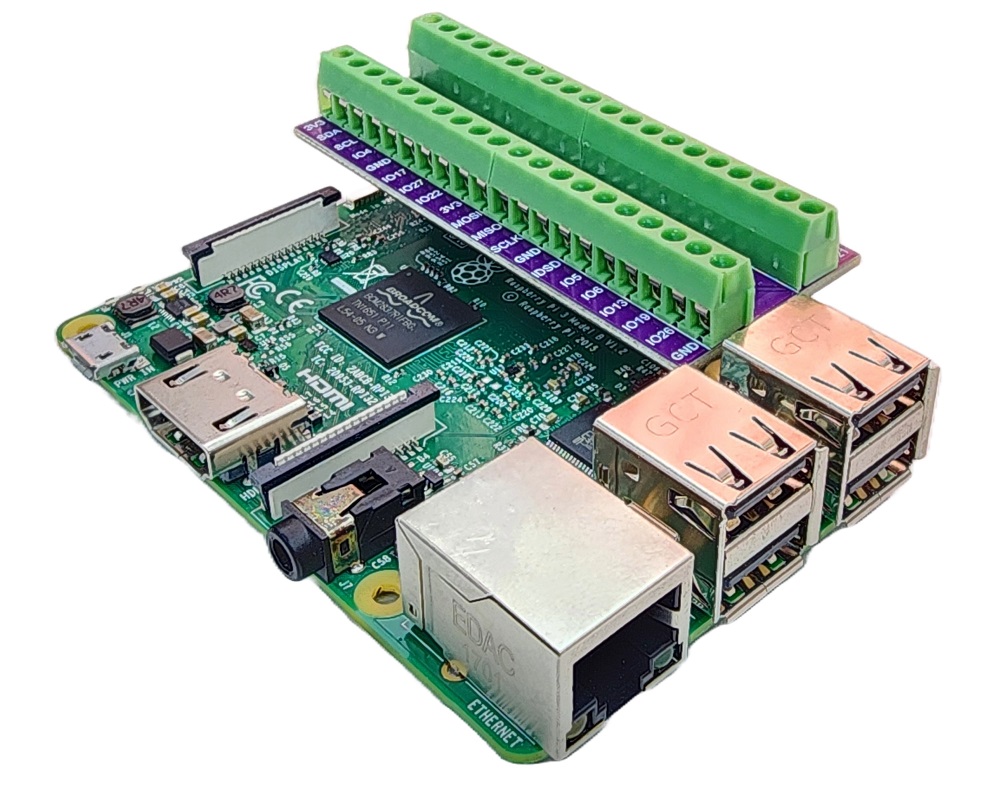
Um Ihren Verdrahtungsaufbau zu vereinfachen und zu organisieren, empfehlen wir die Verwendung eines Schraubklemmenblock-Shields für Raspberry Pi. Dieses Shield gewährleistet sicherere und besser verwaltbare Verbindungen, wie unten gezeigt:
Bitte beachten Sie, dass das oben gezeigte Verdrahtungsdiagramm nur für einen Servo Motor mit geringem Drehmoment geeignet ist. Falls der Motor vibriert anstatt zu rotieren, muss eine externe Stromversorgung verwendet werden, um mehr Leistung für den Servo Motor bereitzustellen. Das folgende zeigt das Verdrahtungsdiagramm mit einer externen Stromversorgung für den Servo Motor.
TO BE ADD IMAGE
Vergessen Sie bitte nicht, GND der externen Stromversorgung mit GND des Raspberry Pi zu verbinden.
Raspberry Pi Code - rotiert Servo Motor bei korrektem Passwort
Wenn das Passwort korrekt ist, wird der Servo Motor für eine Dauer von 5 Sekunden auf 90° eingestellt. Nach Ablauf der 5 Sekunden wird der Servo Motor auf 0° zurückgesetzt.
Schnelle Schritte
- Stellen Sie sicher, dass Sie Raspbian oder ein anderes Raspberry Pi-kompatibles Betriebssystem auf Ihrem Pi installiert haben.
- Stellen Sie sicher, dass Ihr Raspberry Pi mit demselben lokalen Netzwerk wie Ihr PC verbunden ist.
- Stellen Sie sicher, dass Ihr Raspberry Pi mit dem Internet verbunden ist, falls Sie einige Bibliotheken installieren müssen.
- Falls Sie den Raspberry Pi zum ersten Mal verwenden, sehen Sie wie Sie den Raspberry Pi einrichten
- Verbinden Sie Ihren PC über SSH mit dem Raspberry Pi, indem Sie den integrierten SSH-Client unter Linux und macOS oder PuTTY unter Windows verwenden. Siehe wie Sie Ihren PC über SSH mit dem Raspberry Pi verbinden.
- Stellen Sie sicher, dass Sie die RPi.GPIO Bibliothek installiert haben. Falls nicht, installieren Sie sie mit folgendem Befehl:
- Erstellen Sie eine Python-Skript-Datei keypad_servo.py und fügen Sie den folgenden Code hinzu:
- Speichern Sie die Datei und führen Sie das Python-Skript aus, indem Sie den folgenden Befehl im Terminal ausführen:
Das Skript läuft in einer Endlosschleife kontinuierlich, bis Sie Ctrl + C im Terminal drücken.
- Drücken Sie 12345#
- Geben Sie 5642B# ein
- Überprüfen Sie das Ergebnis im Serial Monitor und die Position des Servo Motors.
Code-Erklärung
Die gültigen Passwörter sind im Raspberry Pi Code vordefiniert. Ein String, bezeichnet als input_password, wird verwendet, um das von Benutzern eingegebene Passwort zu speichern. Auf dem Keypad werden zwei Tasten (* und #) für besondere Zwecke verwendet: das Löschen des Passworts und das Beenden des Passworts. Wenn eine Taste auf dem Keypad gedrückt wird:
- Falls die gedrückte Taste nicht eine der beiden besonderen Tasten ist, wird sie zum input_password hinzugefügt.
- Falls die gedrückte Taste * ist, wird das input_password gelöscht. Dies kann verwendet werden, um die Passwort-Eingabe zu starten oder neu zu starten.
- Falls die gedrückte Taste # ist:
- Der Raspberry Pi überprüft, ob das input_password mit einem der vordefinierten Passwörter übereinstimmt, der Servo Motor wird auf 90° rotieren.
- Unabhängig davon, ob das Passwort korrekt ist oder nicht, wird das input_password für die nächste Eingabe gelöscht.
- Nach einer gewissen Zeit rotiert der ESP8266 den Servo Motor auf 0°.
Video Tutorial
Wir erwägen die Erstellung von Video-Tutorials. Wenn Sie Video-Tutorials für wichtig halten, abonnieren Sie bitte unseren YouTube-Kanal , um uns zu motivieren, die Videos zu erstellen.