Raspberry Pi - Potentiometer Servo Motor
Dieses Tutorial zeigt Ihnen, wie Sie mit Raspberry Pi den Winkel eines Servo Motors basierend auf dem Eingabewert eines Potentiometers steuern. Im Detail werden wir lernen:
- Wie man das Potentiometer und den Servo Motor an Raspberry Pi anschließt
- Wie man Raspberry Pi programmiert, um den Wert vom Potentiometer zu lesen und entsprechend einen Servo Motor zu steuern.
Erforderliche Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Kaufhinweis: Falls Sie mehrere Servomotoren verwenden möchten, empfehlen wir die Verwendung des PCA9685 16 Channel PWM Servo Driver Module, um MCU-Pins zu sparen und die Verdrahtung zu vereinfachen.
Über Servo Motor und Potentiometer
Falls Sie mit Servo Motoren und Potentiometern nicht vertraut sind (Pinbelegung, Funktionsweise, Programmierung usw.), können Ihnen die folgenden Tutorials helfen:
Schaltdiagramm
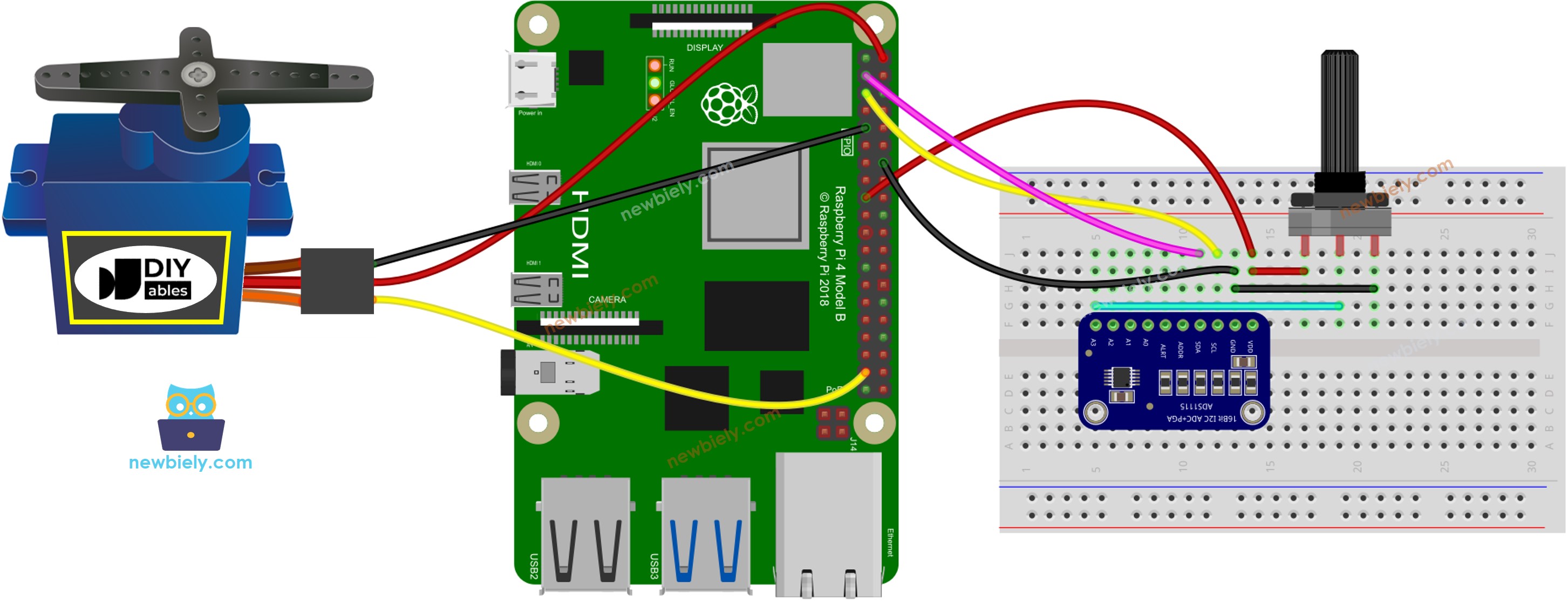
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
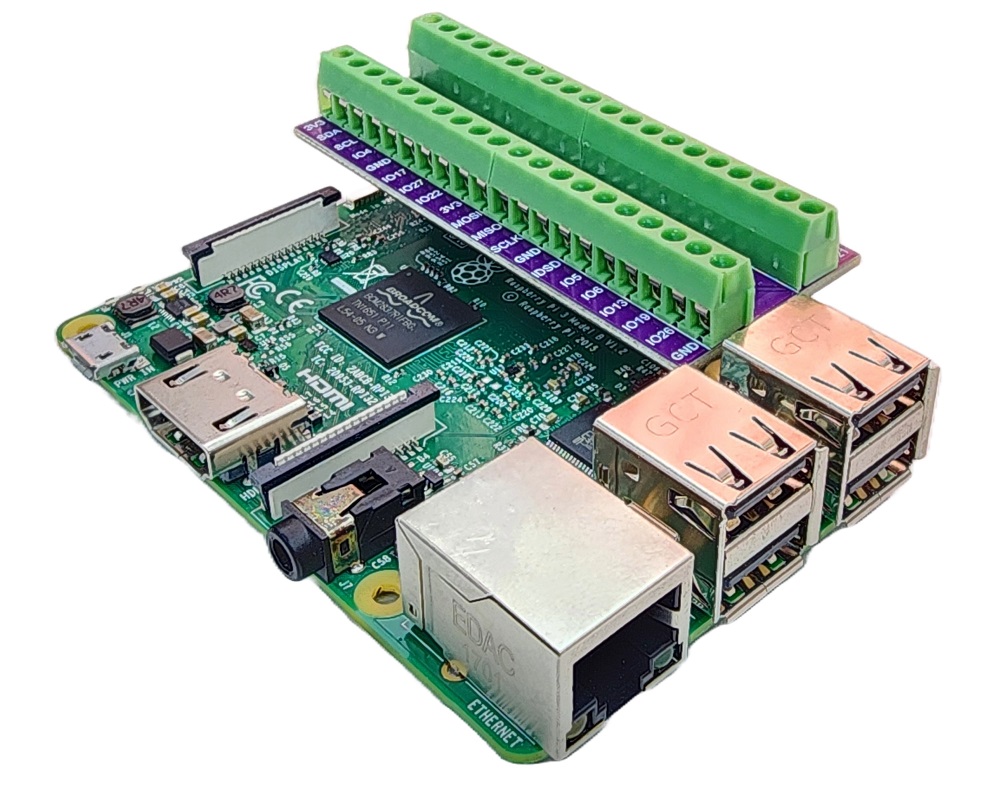
Um Ihren Verdrahtungsaufbau zu vereinfachen und zu organisieren, empfehlen wir die Verwendung eines Schraubklemmenblock-Shields für Raspberry Pi. Dieses Shield gewährleistet sicherere und besser verwaltbare Verbindungen, wie unten gezeigt:
Raspberry Pi Code
Kurze Schritte
- Stellen Sie sicher, dass Sie Raspbian oder ein anderes Raspberry Pi-kompatibles Betriebssystem auf Ihrem Pi installiert haben.
- Stellen Sie sicher, dass Ihr Raspberry Pi mit demselben lokalen Netzwerk wie Ihr PC verbunden ist.
- Stellen Sie sicher, dass Ihr Raspberry Pi mit dem Internet verbunden ist, falls Sie Bibliotheken installieren müssen.
- Neu bei Raspberry Pi? Beginnen Sie mit unserem Raspberry Pi Getting Started Leitfaden, um zuerst die Grundlagen zu lernen.
- Verbinden Sie Ihren PC über SSH mit dem Raspberry Pi, indem Sie den integrierten SSH-Client unter Linux und macOS oder PuTTY unter Windows verwenden. Siehe wie Sie Ihren PC über SSH mit Raspberry Pi verbinden.
- Stellen Sie sicher, dass Sie die RPi.GPIO Bibliothek installiert haben. Falls nicht, installieren Sie sie mit dem folgenden Befehl:
- Installieren Sie die Adafruit_ADS1x15 Bibliothek, indem Sie die folgenden Befehle in Ihrem Raspberry Pi Terminal ausführen:
- Erstellen Sie eine Python-Skriptdatei potentiometer_servo.py und fügen Sie den folgenden Code hinzu:
- Speichern Sie die Datei und führen Sie das Python-Skript aus, indem Sie den folgenden Befehl im Terminal ausführen:
Das Skript läuft in einer Endlosschleife kontinuierlich, bis Sie Ctrl + C im Terminal drücken.
- Drehen Sie das Potentiometer
- Beobachten Sie die Rotation des Servo Motors
- Betrachten Sie das Ergebnis im Serial Monitor
Code-Erklärung
Schauen Sie sich die zeilenweise Erklärung in den Kommentaren des Quellcodes an!
Video Tutorial
Wir erwägen die Erstellung von Video-Tutorials. Wenn Sie Video-Tutorials für wichtig halten, abonnieren Sie bitte unseren YouTube-Kanal , um uns zu motivieren, die Videos zu erstellen.