Raspberry Pi - Hindernissensor
Diese Anleitung erklärt Ihnen, wie Sie den Raspberry Pi mit dem Infrarot-Hindernisvermeidungssensor verwenden. Im Detail werden wir lernen:
- Wie Sie den Raspberry Pi mit dem Infrarot-Hindernisvermeidungssensor verbinden.
- Wie Sie den Raspberry Pi programmieren, um den Zustand des Infrarot-Hindernisvermeidungssensors zu lesen.
- Wie Sie den Raspberry Pi programmieren, um Hindernisse zu erkennen.
Hardware erforderlich
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Über den IR-Hindernisvermeidungssensor
Der Infrarot-Hindernissensor ist in der Lage, die Anwesenheit eines Objekts vor ihm zu erkennen, indem er Infrarotsignale verwendet. Der Erkennungsbereich liegt zwischen 2 cm und 30 cm und kann mit einem eingebauten Potentiometer eingestellt werden.
Pinbelegung des Infrarot-Hindernisvermeidungssensors
Der IR-Hindernisvermeidungssensor hat drei Pins:
- GND Pin: muss mit GND (0V) verbunden werden
- VCC Pin: muss mit VCC (5V oder 3,3V) verbunden werden
- OUT Pin: ist ein Ausgangs-Pin, LOW wenn ein Hindernis vorhanden ist, HIGH wenn kein Hindernis vorhanden ist. Dieser Pin sollte mit einem Raspberry Pi Eingangs-Pin verbunden werden.
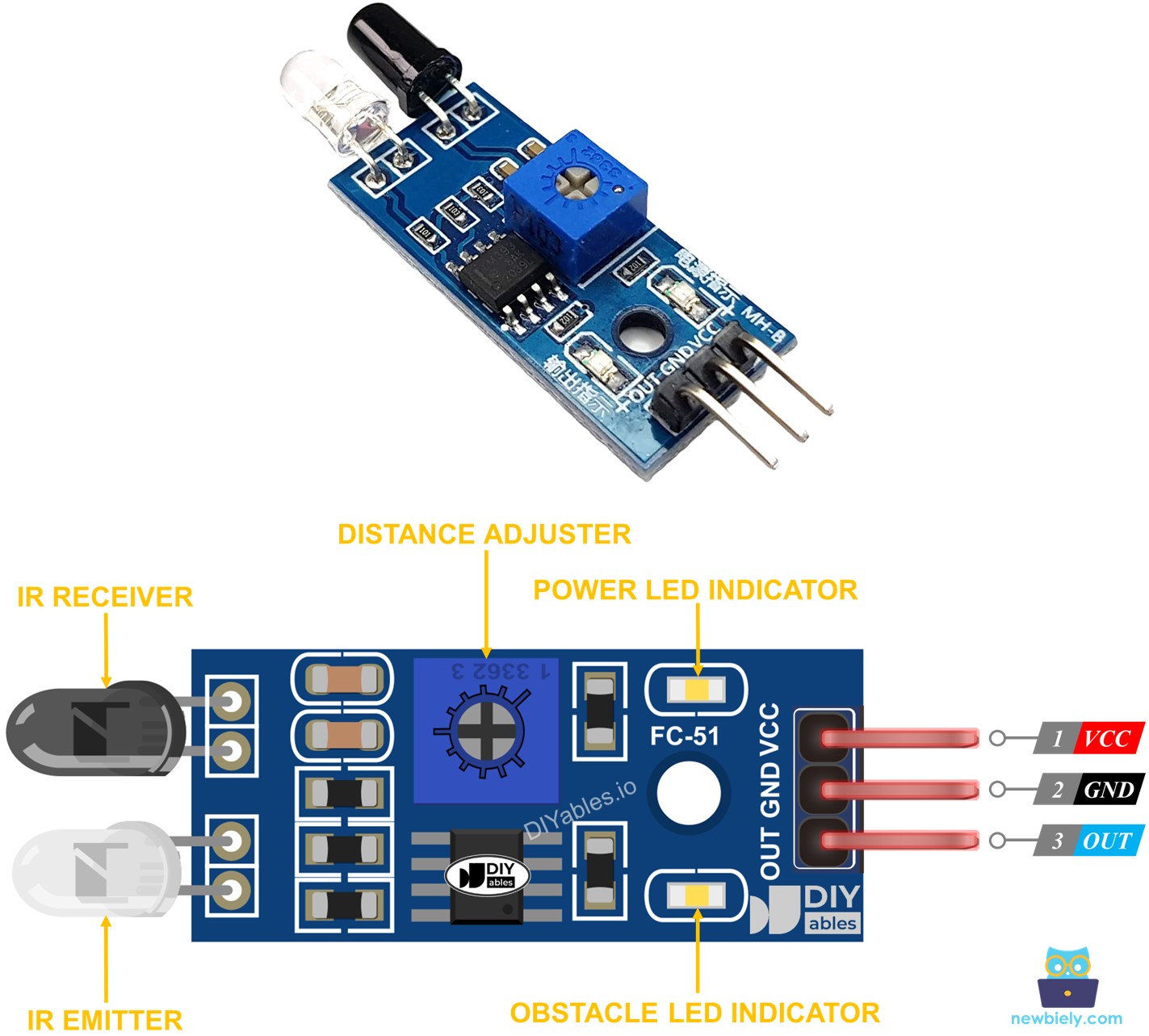
Funktionsweise
Das Infrarot-Hindernis-Sensormodul hat einen eingebauten IR-Sender und IR-Empfänger. Der IR-Sender sendet das IR-Signal aus. Der IR-Empfänger sucht nach dem reflektierten IR-Signal, um zu erkennen, ob ein Objekt vorhanden ist oder nicht. Der OUT Pin des Sensors spiegelt das Vorhandensein eines Hindernisses wider:
- Wenn sich ein Hindernis vor dem Sensor befindet, ist der OUT Pin des Sensors LOW
- Wenn sich kein Hindernis vor dem Sensor befindet, ist der OUT Pin des Sensors HIGH
※ Notiz:
Während des Transports kann sich der Sensor verformen, was zu Fehlfunktionen führen kann. Wenn der Sensor nicht ordnungsgemäß funktioniert, justieren Sie IR-Sender und Empfänger, um sicherzustellen, dass sie parallel zueinander stehen.
Verdrahtungsdiagramm
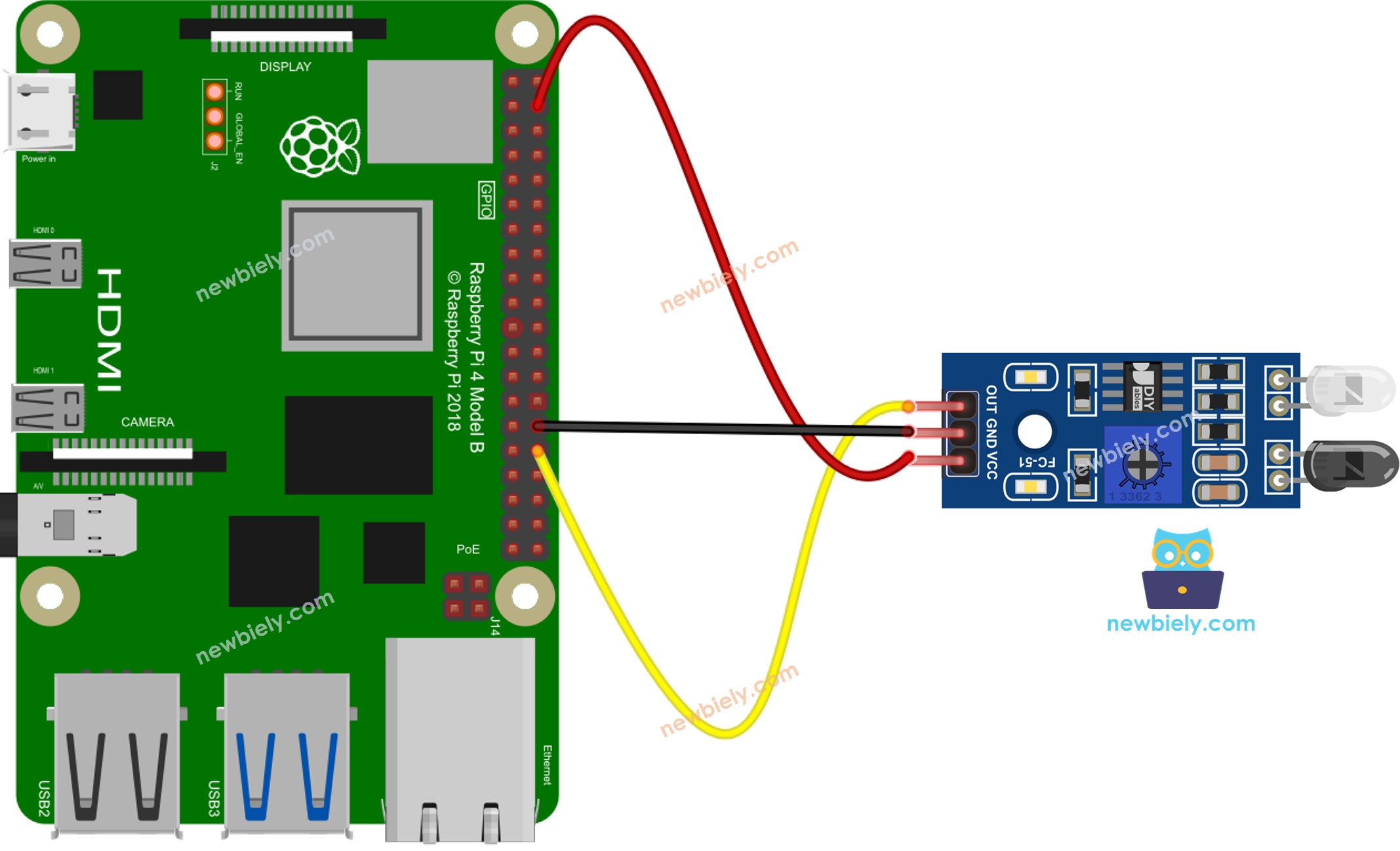
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
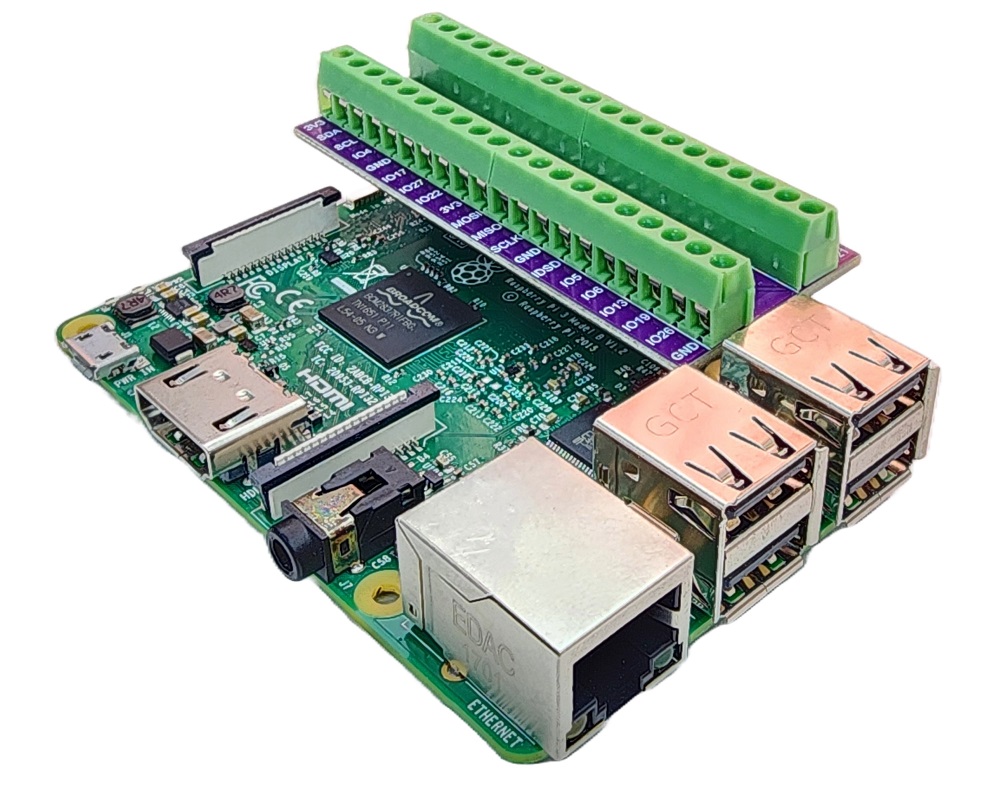
Um Ihren Verdrahtungsaufbau zu vereinfachen und zu organisieren, empfehlen wir die Verwendung eines Schraubklemmenblock-Shields für Raspberry Pi. Dieses Shield gewährleistet sicherere und besser verwaltbare Verbindungen, wie unten gezeigt:
Programmierung für den IR-Hindernisvermeidungssensor
- Initialisieren Sie den Raspberry Pi Pin in den digitalen Eingangsmodus mit der GPIO.setup() Funktion.
- Verwenden Sie die GPIO.input() Funktion, um den Zustand des Raspberry Pi Pins zu prüfen.
Raspberry Pi Code
Zwei Ansätze können bei der Programmierung für eine Hindernisvermeidungsanwendung verfolgt werden:
- Maßnahmen ergreifen, je nachdem ob ein Hindernis vorhanden ist oder nicht
- Maßnahmen ergreifen basierend darauf, ob ein Hindernis erkannt oder entfernt wurde
Raspberry Pi Code zur Überprüfung, ob ein Hindernis vorhanden ist
Schnelle Schritte
- Stellen Sie sicher, dass Sie Raspbian oder ein anderes Raspberry Pi-kompatibles Betriebssystem auf Ihrem Pi installiert haben.
- Stellen Sie sicher, dass Ihr Raspberry Pi mit demselben lokalen Netzwerk wie Ihr PC verbunden ist.
- Stellen Sie sicher, dass Ihr Raspberry Pi mit dem Internet verbunden ist, falls Sie einige Bibliotheken installieren müssen.
- Wenn Sie den Raspberry Pi zum ersten Mal verwenden, siehe Raspberry Pi einrichten
- Verbinden Sie Ihren PC über SSH mit dem Raspberry Pi, indem Sie den eingebauten SSH-Client unter Linux und macOS oder PuTTY unter Windows verwenden. Siehe PC über SSH mit Raspberry Pi verbinden.
- Stellen Sie sicher, dass die RPi.GPIO Bibliothek installiert ist. Falls nicht, installieren Sie sie mit folgendem Befehl:
- Erstellen Sie eine Python-Skriptdatei obstacle_sensor.py und fügen Sie folgenden Code hinzu:
- Speichern Sie die Datei und führen Sie das Python-Skript aus, indem Sie folgenden Befehl im Terminal eingeben:
- Platzieren Sie ein Hindernis für eine gewisse Zeit vor dem Sensor und entfernen Sie es dann wieder.
- Überprüfen Sie das Ergebnis im Terminal.
Das Skript läuft in einer Endlosschleife kontinuierlich, bis Sie Ctrl + C im Terminal drücken.
Raspberry Pi Code zur Hinderniserkennung
Schnelle Schritte
- Erstellen Sie eine Python-Skriptdatei obstacle_sensor_events.py und fügen Sie folgenden Code hinzu:
- Speichern Sie die Datei und führen Sie das Python-Skript aus, indem Sie folgenden Befehl im Terminal eingeben:
- Platzieren Sie ein Hindernis für eine Weile vor dem Sensor und entfernen Sie es dann wieder.
- Überprüfen Sie die Ergebnisse im Terminal.
Video Tutorial
Wir erwägen die Erstellung von Video-Tutorials. Wenn Sie Video-Tutorials für wichtig halten, abonnieren Sie bitte unseren YouTube-Kanal , um uns zu motivieren, die Videos zu erstellen.