Raspberry Pi - Motor
Diese Anleitung zeigt Ihnen, wie Sie mit Raspberry Pi Motoren steuern. Im Detail lernen wir:
- Die verschiedenen Motoren, die mit Raspberry Pi verwendet werden können
- Die Unterschiede zwischen den verschiedenen Motortypen
- Wie Sie jeden Motortyp steuern
Motortypen
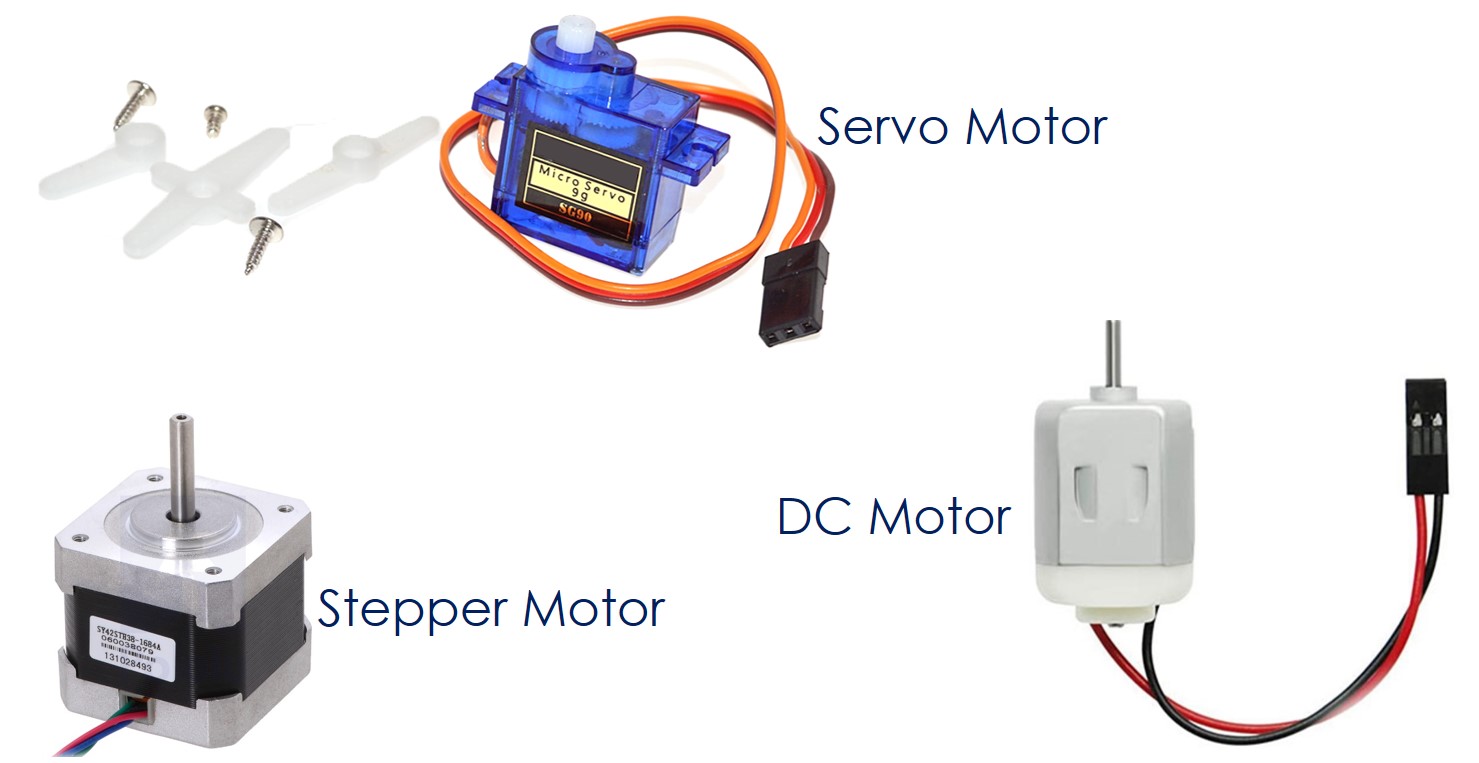
Es gibt drei Arten von Motoren, die häufig in Verbindung mit Arduino verwendet werden:
- Servo Motor
- Schrittmotor (Stepper Motor)
- DC Motor
Es gibt zwei Arten von Servo Motoren: 180° Servo Motor und 360° Servo Motor. Im Allgemeinen denken Menschen bei Servo Motoren implizit an einen 180° Servo Motor.
Ein 360° Servo Motor ist ähnlich einem DC Motor, jedoch ist kein Hardware-Treiber erforderlich.
180° Servo Motor
Eigenschaften
- Die Rotation ist zwischen 0° und 180° begrenzt.
- Die Rotationsrichtung kann im Uhrzeigersinn oder gegen den Uhrzeigersinn erfolgen.
- Die Rotationsposition kann auf jeden Winkel zwischen 0° und 180° eingestellt werden.
- Die Rotationsgeschwindigkeit kann reguliert werden, aber nicht gleichmäßig.
- Kein zusätzlicher Hardware-Treiber ist nötig, nur ein Raspberry Pi Pin.
- Eine zusätzliche Stromversorgung ist erforderlich.
- Die Steuerung ist einfach mit Verwendung eines PWM-Signals.
Anwendung
- Jede Anwendung, die nur eine Rotation eines Winkels zwischen 0° und 180° benötigt.
Servo Motor Tutorial
Schauen Sie sich unser Raspberry Pi - Servo Motor Tutorial für weitere Informationen an.
Schrittmotor
Eigenschaften
- Die Rotationsmenge ist nicht eingeschränkt.
- Die Rotationsrichtung kann sowohl im Uhrzeigersinn als auch gegen den Uhrzeigersinn erfolgen.
- Es ist möglich, die Rotationsposition präzise auf jeden Winkel zu steuern.
- Die Rotationsgeschwindigkeit kann präzise reguliert werden und Beschleunigung sowie Verzögerung können präzise kontrolliert werden.
- Ein zusätzlicher Hardware-Treiber ist erforderlich.
- Eine zusätzliche Stromquelle ist ebenfalls nötig.
- Die Steuerung ist kompliziert, daher sollten Anfänger die Bibliothek verwenden.
Anwendung
- Automatisierung und Robotik
- Drucker, 3D-Drucker, CNCs, X-Y-Plotter
- Cocktail-Maschinen
Schrittmotor Tutorials
- Raspberry Pi - Schrittmotor Tutorial
- Raspberry Pi - 28BYJ-48 Schrittmotor Tutorial
DC Motor
Eigenschaften
- Die Rotationsmenge ist unbegrenzt.
- Die Rotationsrichtung kann sowohl im Uhrzeigersinn als auch gegen den Uhrzeigersinn erfolgen.
- Es ist sehr schwer, zu einem präzisen Winkel zu rotieren.
- Es ist einfach, die Rotationsgeschwindigkeit zu steuern, aber es ist schwierig, sie auf einen exakten Wert einzustellen.
- Ein zusätzlicher Hardware-Treiber ist erforderlich.
- Eine zusätzliche Stromquelle ist ebenfalls nötig.
- Die Steuerung ist einfach; verwenden Sie einfach ein hochspannungs-PWM-Signal.
※ Notiz:
- , daher ist es einfacher, die Position des DC Motors zu steuern.
- Um die Position eines DC Motors zu steuern, ist zusätzliche Hardware wie ein Encoder erforderlich, zusammen mit einer geschlossenen Regelkreismethode wie PID-Kontrolle. Dies kann für Anfänger herausfordernd sein.
- Die Geschwindigkeitssteuerung ist einfacher, da sie auf langsam, mittel, schnell oder sehr schnell eingestellt werden kann und sogar auf einen bestimmten Prozentsatz der vollen Geschwindigkeit. Die Kontrolle der Umdrehungen pro Sekunde erfordert jedoch die Verwendung eines Encoders und einer geschlossenen Regelkreismethode wie PID-Kontrolle, was für Anfänger schwierig sein kann.
- Einige DC Motoren auf dem Markt haben einen eingebauten Encoder, was die Positionssteuerung des Motors erleichtert.
Anwendung
- Früher verwendet, um etwas zu steuern, das kontinuierlich rotieren muss, aber ohne die Notwendigkeit einer spezifischen Geschwindigkeit. Beispiele umfassen Ventilatoren, Pumpen, RC-Autos, Bohrer, etc.
※ Notiz:
und Robotik. Es gibt zwei Hauptarten von DC Motoren: gebürstete und bürstenlose. Gebürstete DC Motoren werden häufig in DIY-Projekten und Robotik verwendet.
DC Motor Tutorial
Schauen Sie sich dieses Tutorial zu Raspberry Pi - DC Motor an.
Motor Auswahlhilfe
Bei der Auswahl eines Motors für ein Projekt gibt es viele Faktoren zu berücksichtigen, wie das Gewicht, das er tragen muss, die Stromversorgung und die Eigenschaften der Anwendung.
- Wenn Sie benötigen, dass Ihr Projekt zu einem bestimmten Winkel zwischen 0° und 180° rotiert, sollten Sie einen 180° Servo Motor suchen.
- Wenn Sie eine präzise Rotation zu jeder Position benötigen, sollten Sie einen Schrittmotor finden.
- Wenn Sie kontinuierliche Rotation ohne spezifische Position benötigen, sollten Sie einen DC Motor oder einen 360° Servo Motor suchen.