Raspberry Pi - Servo Motor
Diese Anleitung zeigt Ihnen, wie Sie Raspberry Pi zur Steuerung eines Servo Motors verwenden. Im Detail lernen wir:
- Wie man einen Servo Motor an Raspberry Pi anschließt
- Wie man Raspberry Pi programmiert, um einen Servo Motor zu drehen
- Wie man die Geschwindigkeit eines Servo Motors mit Raspberry Pi steuert
Hardware Erforderlich
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Kaufhinweis: Falls Sie mehrere Servomotoren verwenden möchten, empfehlen wir die Verwendung des PCA9685 16 Channel PWM Servo Driver Module, um MCU-Pins zu sparen und die Verdrahtung zu vereinfachen.
Über den Servo Motor
Ein Servo Motor ist ein Bauteil, das seine Welle in einem bestimmten Bewegungsbereich drehen kann, typischerweise zwischen 0 und 180 Grad. Er wird häufig verwendet, um die Winkelposition eines Objekts zu steuern.
Der Servo Motor Pinout
Der Servo Motor hat drei Pins:
- VCC Pin (normalerweise rot), der an VCC (5V) angeschlossen werden muss
- GND Pin (typischerweise schwarz oder braun), der an GND (0V) angeschlossen werden muss
- Signal Pin (normalerweise gelb oder orange), der das PWM-Steuersignal von einem Raspberry Pi Pin empfängt.

Raspberry Pi - Servo Motor
Einige der Pins an einem Raspberry Pi können programmiert werden, um ein PWM-Signal zu erzeugen. Wir können einen Servo Motor steuern, indem wir seinen Signal Pin an einen der Raspberry Pi Pins anschließen und ihn programmieren, um ein PWM auf diesem Pin zu erzeugen.
Dank der Raspberry Pi Servo Bibliothek wird die Steuerung eines Servo Motors einfach gemacht. Wir müssen nicht verstehen, wie der Servo Motor funktioniert oder wie man ein PWM-Signal erzeugt. Alles was wir tun müssen, ist zu lernen, wie man die Bibliothek verwendet.
Schaltdiagramm
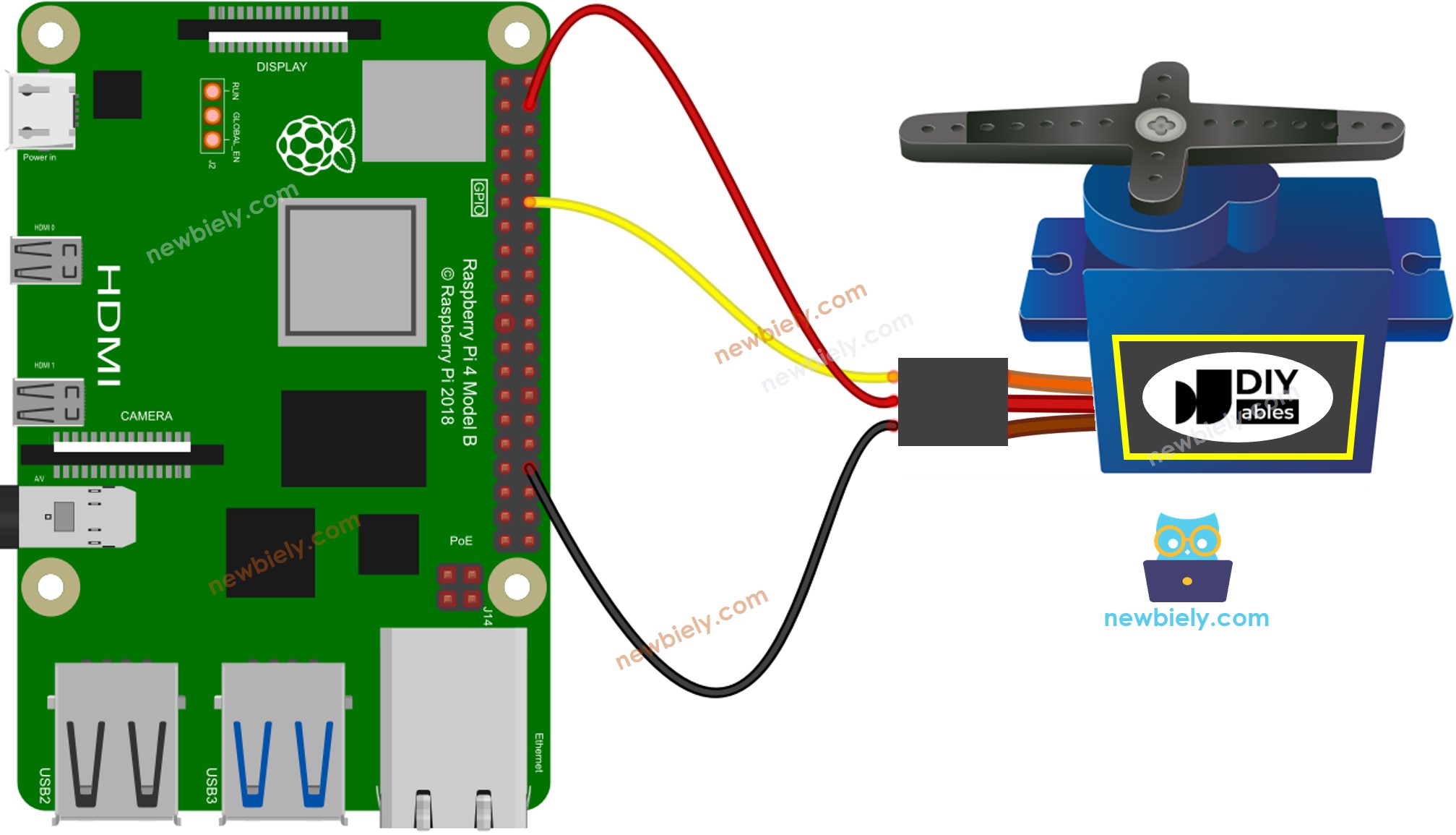
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
Um die Dinge einfach zu halten, wird das obige Schaltdiagramm zum Testen und Lernen verwendet und ist für einen Servo Motor mit geringem Drehmoment geeignet. Wir empfehlen dringend, eine externe Stromversorgung für den Servo Motor zu verwenden. Das untenstehende Schaltdiagramm zeigt, wie man den Servo Motor an eine externe Stromquelle anschließt.
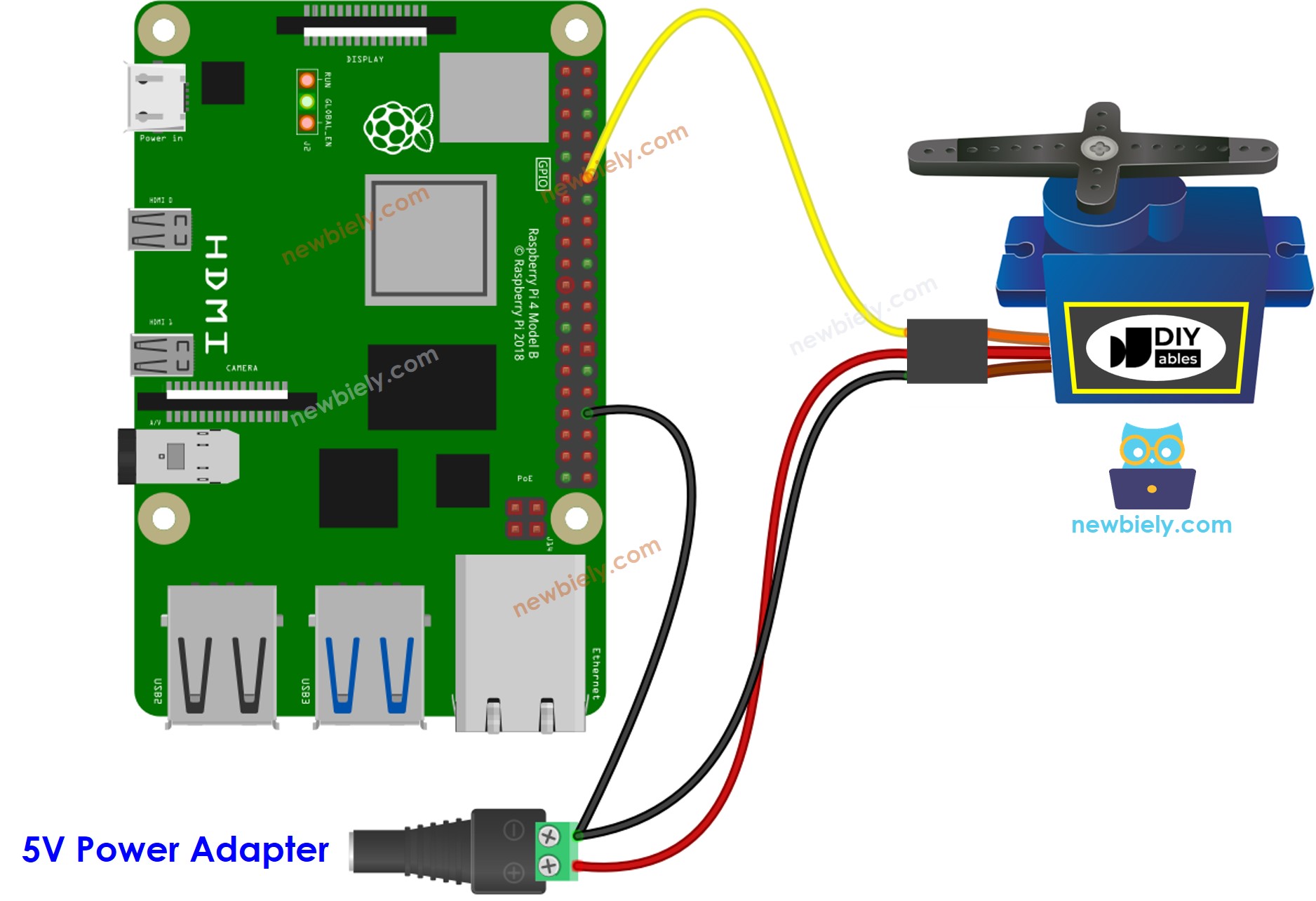
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
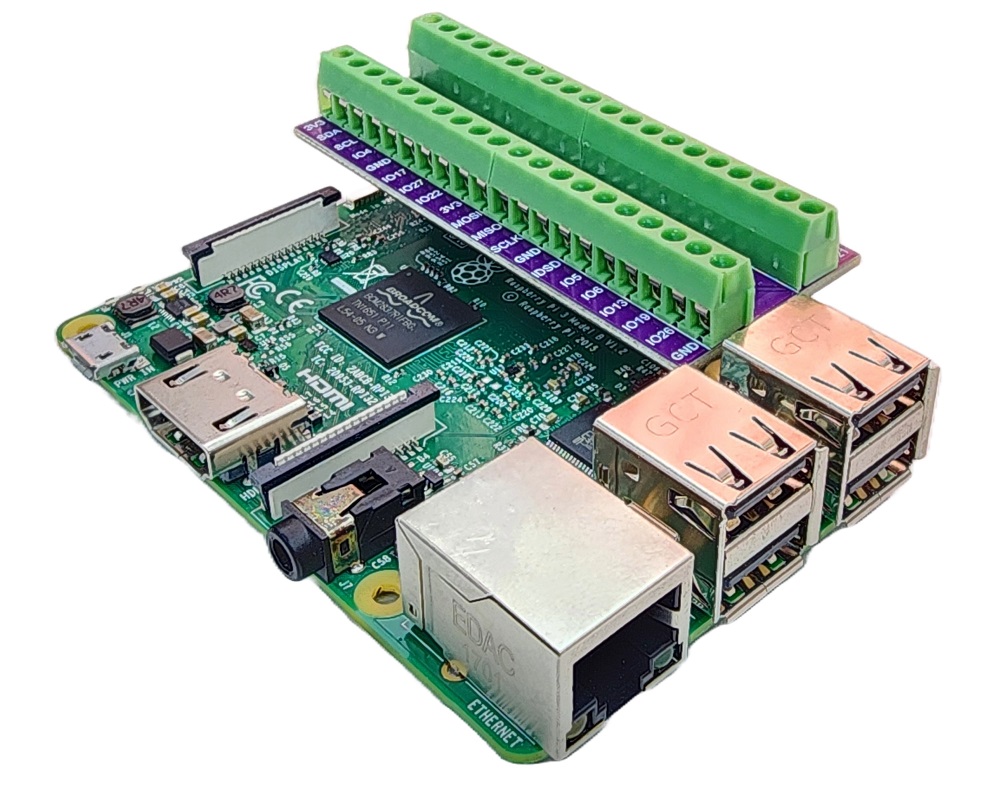
Um Ihren Verdrahtungsaufbau zu vereinfachen und zu organisieren, empfehlen wir die Verwendung eines Schraubklemmenblock-Shields für Raspberry Pi. Dieses Shield gewährleistet sicherere und besser verwaltbare Verbindungen, wie unten gezeigt:
Raspberry Pi Code
Schnelle Schritte
- Stellen Sie sicher, dass Sie Raspbian oder ein anderes Raspberry Pi-kompatibles Betriebssystem auf Ihrem Pi installiert haben.
- Stellen Sie sicher, dass Ihr Raspberry Pi mit demselben lokalen Netzwerk wie Ihr PC verbunden ist.
- Stellen Sie sicher, dass Ihr Raspberry Pi mit dem Internet verbunden ist, falls Sie Bibliotheken installieren müssen.
- Falls dies das erste Mal ist, dass Sie Raspberry Pi verwenden, schauen Sie sich an, wie man den Raspberry Pi einrichtet
- Verbinden Sie Ihren PC über SSH mit dem Raspberry Pi, indem Sie den integrierten SSH-Client unter Linux und macOS oder PuTTY unter Windows verwenden. Siehe wie Sie Ihren PC über SSH mit Raspberry Pi verbinden.
- Stellen Sie sicher, dass Sie die RPi.GPIO Bibliothek installiert haben. Falls nicht, installieren Sie sie mit folgendem Befehl:
- Erstellen Sie eine Python-Skriptdatei servo_motor.py und fügen Sie folgenden Code hinzu:
- Speichern Sie die Datei und führen Sie das Python-Skript aus, indem Sie folgenden Befehl im Terminal ausführen:
Das Skript läuft in einer Endlosschleife kontinuierlich, bis Sie Ctrl + C im Terminal drücken.
- Überprüfen Sie das Ergebnis: Der Servo Motor rotiert mit langsamer Geschwindigkeit sowohl im Uhrzeigersinn als auch gegen den Uhrzeigersinn, bis zu 180°.
Code-Erklärung
Schauen Sie sich die zeilenweise Erklärung in den Kommentaren des Quellcodes an!
Wie man die Geschwindigkeit des Servo Motors steuert
Video Tutorial
Wir erwägen die Erstellung von Video-Tutorials. Wenn Sie Video-Tutorials für wichtig halten, abonnieren Sie bitte unseren YouTube-Kanal , um uns zu motivieren, die Videos zu erstellen.