Arduino Nano - Motor
Dieses Tutorial erklärt Ihnen, wie man Arduino Nano und ......... verwendet, um ........... zu steuern. Im Detail:
- Die Arten von Motoren, die mit dem Arduino Nano verwendet werden können
- Die Unterschiede zwischen den verschiedenen Arten von Motoren
- Wie man jeden Motortyp steuert
Motortypen
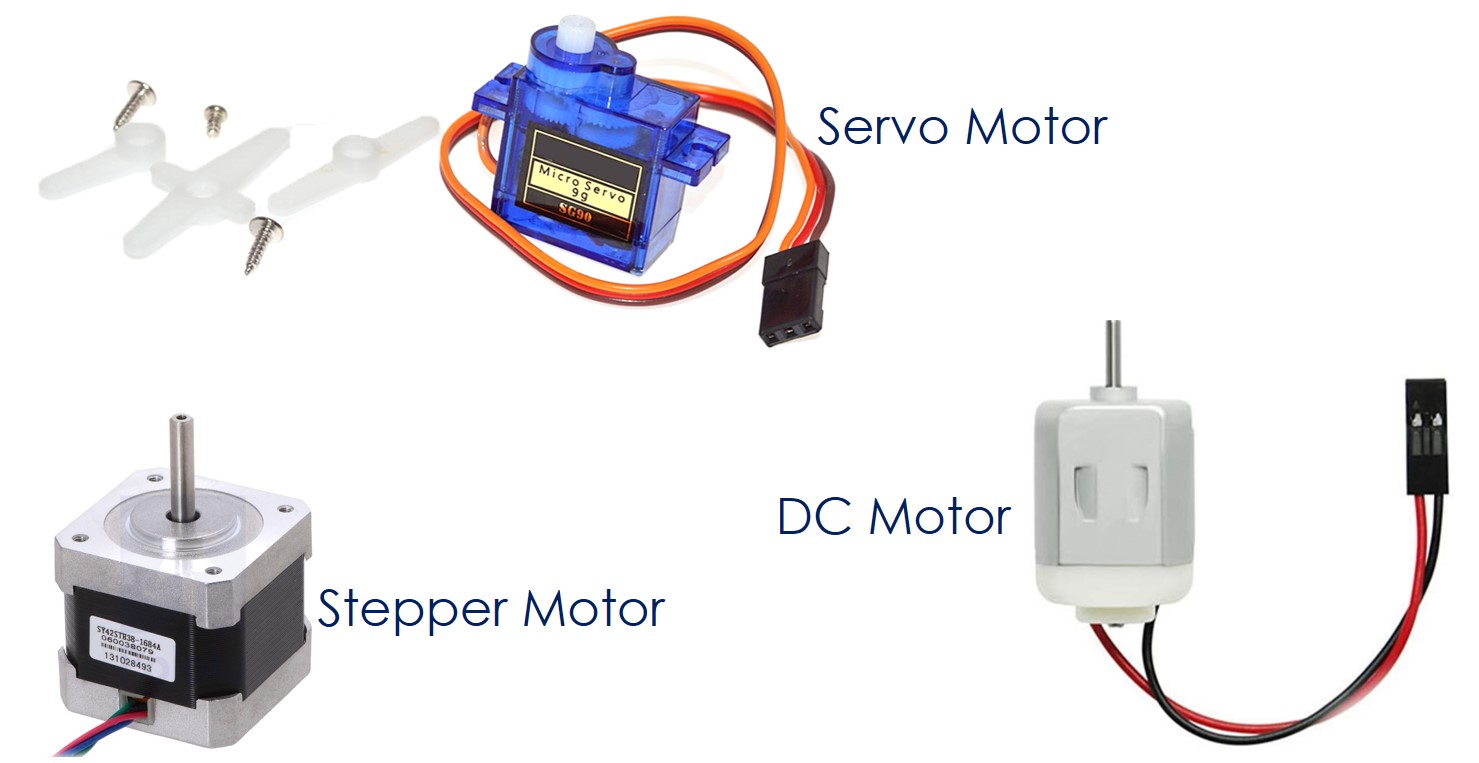
Es gibt drei Arten von Motoren, die häufig mit Arduino verwendet werden:
- Servomotor
- Schrittmotor
- Gleichstrommotor
Es gibt zwei Hauptvarianten von Servomotoren: 180°-Servomotor und 360°-Servomotor. Im Allgemeinen bezieht man sich, wenn man an einen Servomotor denkt, normalerweise auf den 180°-Servomotor.
Ein 360°-Servomotor ist einem Gleichstrommotor ähnlich, benötigt jedoch keinen Hardwaretreiber.
180°-Servomotor
Eigenschaften
- Der Drehbereich reicht von 0° bis 180°.
- Die Drehrichtung kann entweder im Uhrzeigersinn oder gegen den Uhrzeigersinn erfolgen.
- Es ist möglich, die Drehung auf einen bestimmten Winkel zwischen 0° und 180° zu steuern.
- Die Drehgeschwindigkeit ist einstellbar, aber nicht sanft regelbar.
- Für die Steuerung ist kein zusätzlicher Hardwaretreiber erforderlich, da dies direkt über einen Pin des Arduino Nano erfolgen kann.
- Eine zusätzliche Stromversorgung ist erforderlich.
- Die Steuerung der Drehung ist einfach, da sie über ein PWM-Signal erfolgen kann.
Anwendung
- Jede Anwendung, die nur eine Drehung eines Winkels zwischen 0° und 180° erfordert.
Servomotor Tutorial
Besuchen Sie diese Seite für ein Tutorial über Arduino Nano und Servomotor.
Schrittmotor
Eigenschaften
- Der Drehwinkel ist unbegrenzt.
- Die Drehrichtung kann im Uhrzeigersinn oder gegen den Uhrzeigersinn erfolgen.
- Der Drehwinkel kann präzise auf jeden gewünschten Winkel eingestellt werden.
- Die Drehgeschwindigkeit kann präzise gesteuert werden, ebenso wie die Beschleunigung und Verzögerung.
- Zusätzliche Hardware und eine Stromversorgung sind erforderlich.
- Die Steuerung ist komplex, daher sollten Anfänger eine Bibliothek verwenden.
Anwendung
- Automatisierung und Robotik
- Drucker, 3D-Drucker, CNC-Maschinen, X-Y-Plotter
- Cocktailmaschinen
Schrittmotor Tutorial
- Arduino Nano - Stepper Motor tutorial
Gleichstrommotor
Eigenschaften
- Die Anzahl der Umdrehungen ist nicht begrenzt.
- Die Drehrichtung kann entweder im Uhrzeigersinn oder gegen den Uhrzeigersinn erfolgen.
- Es ist sehr schwer, einen genauen Winkel zu erreichen.
- Es ist einfach, die Rotationsgeschwindigkeit zu steuern, aber es ist schwierig, einen bestimmten Geschwindigkeitswert festzulegen.
- Ein zusätzlicher Hardwaretreiber ist erforderlich.
- Eine zusätzliche Stromversorgung ist ebenfalls erforderlich.
- Die Steuerung der Rotation ist einfach; verwenden Sie einfach ein Hochspannungs-PWM-Signal.
※ Notiz:
- , was die Steuerung erleichtert.
- Um eine präzise Positionierung eines Gleichstrommotors zu erreichen, ist zusätzliche Hardware erforderlich, wie etwa ein Encoder, und eine Regelung im geschlossenen Regelkreis, wie die PID-Regelung, muss verwendet werden. Dies kann für Anfänger herausfordernd sein.
- Zur Geschwindigkeitsregelung ist es einfach, die Geschwindigkeit einzustellen, z. B. langsam, mittel, schnell oder sehr schnell, sowie den Prozentsatz der Höchstgeschwindigkeit. Um jedoch die Anzahl der Umdrehungen pro Sekunde zu steuern, werden ein Encoder und eine Regelung im geschlossenen Regelkreis wie die PID-Regelung benötigt. Dies kann für diejenigen, die gerade erst anfangen, schwierig sein.
- Bestimmte Gleichstrommotoren auf dem Markt verfügen über einen eingebauten Encoder, was den Steuerungsprozess vereinfacht.
Anwendung
- Wurde früher verwendet, um etwas zu steuern, das eine gleichmäßige Drehung erfordert, ohne die Geschwindigkeit angeben zu müssen. Beispiele sind Ventilatoren, Pumpen, RC-Autos, Bohrmaschinen usw.
※ Notiz:
und Robotik. Es gibt zwei Haupttypen von Gleichstrommotoren: gebürstete und bürstenlose. Gebürstete Gleichstrommotoren werden häufig in DIY-Projekten und der Robotik verwendet.
Tutorial zum Gleichstrommotor
Schau dir unser Arduino Nano - DC Motor tutorial für weitere Informationen an! Schau dir unser Arduino Nano - DC Motor tutorial für weitere Details an!
Motorauswahlleitfaden
Bei der Auswahl eines Motors für ein Projekt sind verschiedene Faktoren zu berücksichtigen, wie das Gewicht, das der Motor tragen muss, die Stromversorgung und die Eigenschaften der Anwendung:
- Wenn Ihr Projekt eine Rotation zwischen 0° und 180° erfordert, sollten Sie nach einem 180°-Servomotor suchen.
- Wenn Ihr Projekt eine genaue Rotation zu jeder Position benötigt, sollten Sie einen Schrittmotor finden.
- Wenn Ihr Projekt eine kontinuierliche Rotation ohne eine bestimmte Position benötigt, sollten Sie einen Gleichstrommotor oder einen 360°-Servomotor erwerben.