Arduino Nano - Servomotor
Dieses Tutorial zeigt dir, wie man den Arduino Nano verwendet, um einen Servomotor zu steuern. Im Detail werden wir lernen:
- Wie man einen Servomotor mit dem Arduino Nano verbindet
- Wie man den Arduino Nano programmiert, um einen Servomotor zu steuern
- Wie man die Geschwindigkeit eines Servomotors mit dem Arduino Nano steuert
Erforderliche Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Kaufhinweis: Falls Sie mehrere Servomotoren verwenden möchten, empfehlen wir die Verwendung des PCA9685 16 Channel PWM Servo Driver Module, um MCU-Pins zu sparen und die Verdrahtung zu vereinfachen.
Über Servomotor
Ein Servomotor ist eine Komponente, die in der Lage ist, seine Welle zu drehen, typischerweise zwischen 0° und 180°. Er wird üblicherweise verwendet, um die Winkelposition eines Objekts zu steuern.
Die Pinbelegung des Servomotors
Der Servomotor hat drei Anschlüsse:
- VCC-Pin (in der Regel rot) muss mit VCC (5V) verbunden werden
- GND-Pin (in der Regel schwarz oder braun) muss mit GND (0V) verbunden werden
- Signal-Pin (in der Regel gelb oder orange) empfängt das PWM-Steuersignal von einem Pin eines Arduino Nano

Arduino Nano - Servomotor
Einige der Pins des Arduino Nano können so programmiert werden, dass sie ein PWM-Signal erzeugen. Wir können den Signaleingang des Servomotors an einen dieser Pins anschließen und ihn so programmieren, dass ein PWM-Ausgang erzeugt wird. Dadurch können wir den Servomotor steuern.
Dank der Arduino Nano Servo-Bibliothek ist die Steuerung eines Servomotors einfach. Wir müssen nicht verstehen, wie Servomotoren funktionieren oder wie man PWM-Signale erzeugt. Alles, was wir tun müssen, ist zu lernen, wie man die Bibliothek verwendet.
Verdrahtungsdiagramm
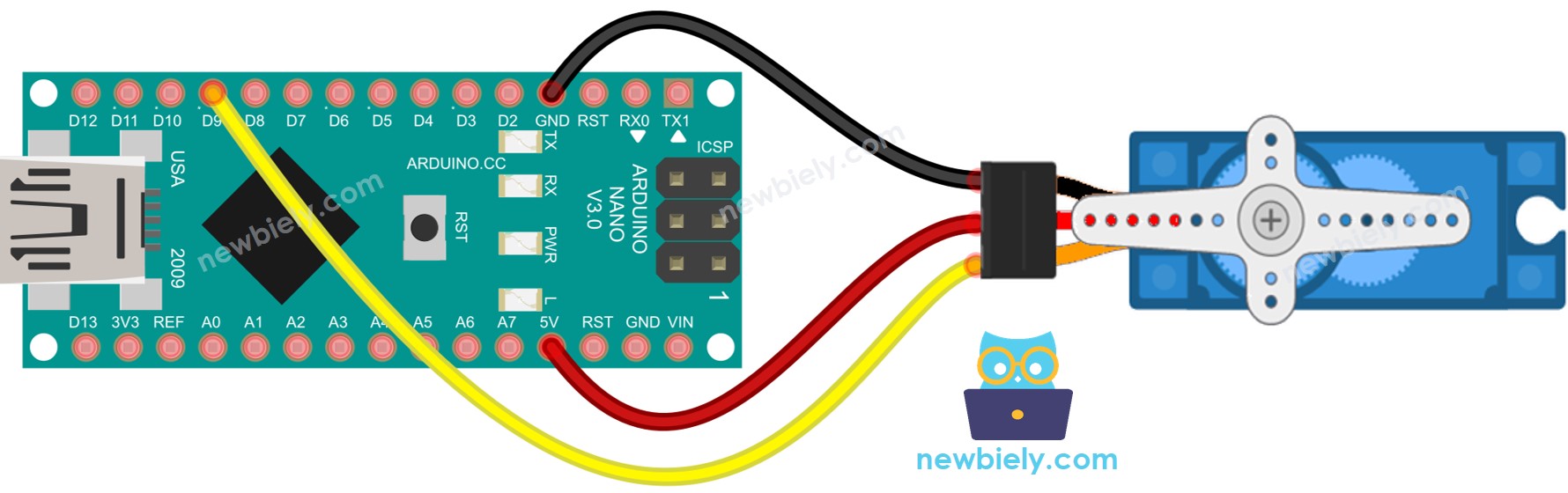
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
Aus Gründen der Einfachheit wird das oben gezeigte Verdrahtungsschema für Tests- oder Bildungszwecke verwendet und für einen Servomotor mit kleinem Drehmoment vorgesehen. Wir empfehlen dringend, in der Praxis eine externe Stromquelle für den Servomotor zu verwenden. Das untenstehende Verdrahtungsschema veranschaulicht, wie der Servomotor an eine externe Stromquelle angeschlossen wird.
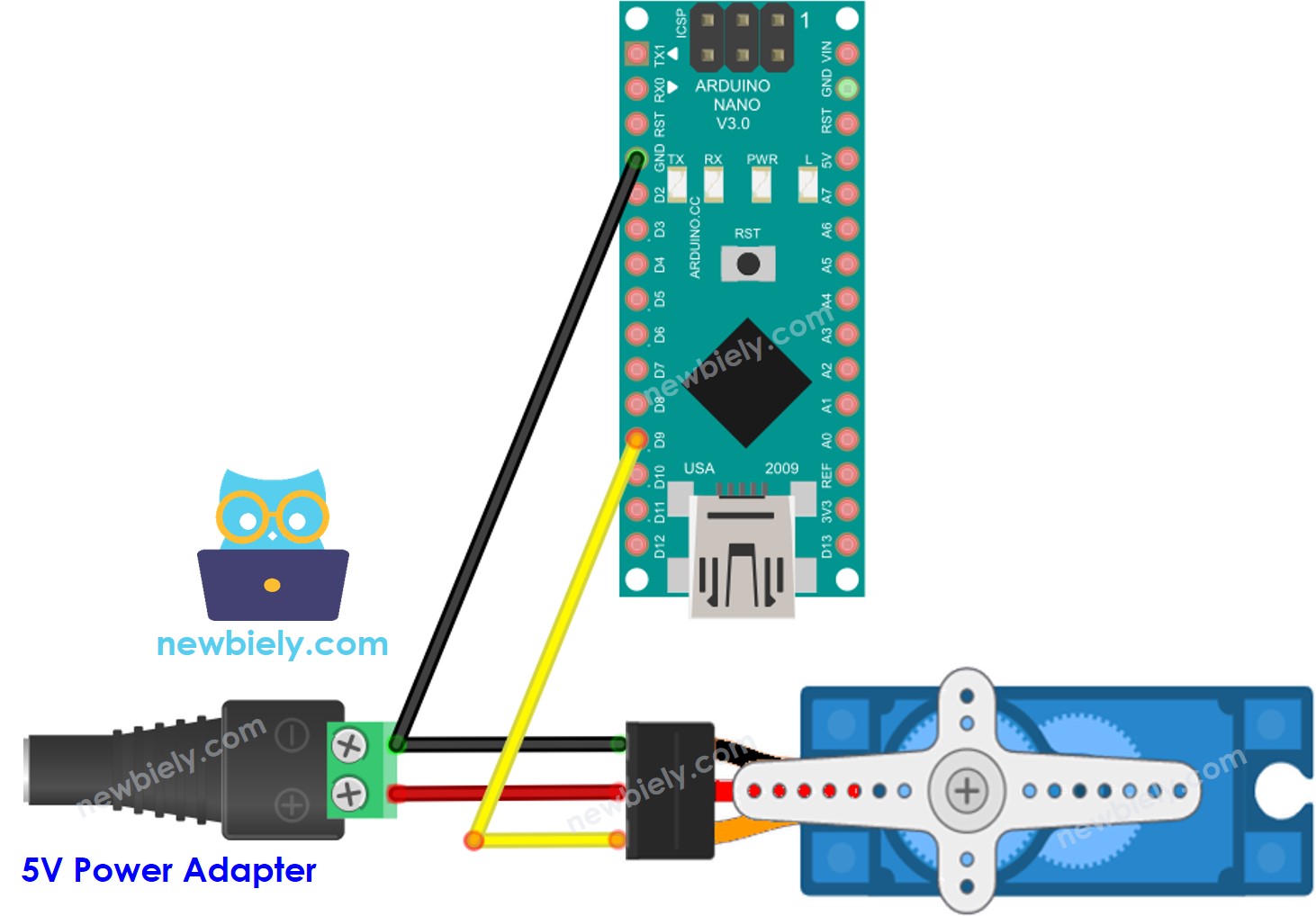
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
Siehe Der beste Weg, den Arduino Nano und andere Komponenten mit Strom zu versorgen.
Bitte nicht vergessen, den GND der externen Stromversorgung mit dem GND des Arduino zu verbinden.
Wie man einen Servomotor programmiert
- Die Bibliothek einbinden:
- Erzeuge ein Servo-Objekt:
- Wenn Sie mehr als einen Servomotor haben, deklarieren Sie einfach zusätzliche Servo-Objekte:
- Weisen Sie dem Arduino Nano zu, der mit dem Signalpin des Servomotors verbunden ist. Als Beispiel verwenden Sie Pin 9:
- Schließlich steuern Sie den Servomotor auf den erforderlichen Winkel. Zum Beispiel 90°
Arduino Nano Quellcode
Schnelle Schritte
- Schließen Sie den Arduino Nano über ein USB-Kabel an Ihren Computer an.
- Starten Sie die Arduino IDE und wählen Sie das richtige Board und den richtigen Port aus.
- Kopieren Sie den Code und öffnen Sie ihn in der Arduino IDE.
- Klicken Sie in der Arduino IDE auf die Schaltfläche Hochladen, um den Code zu kompilieren und auf den Arduino Nano hochzuladen.

- Schau dir das Ergebnis an: Der Servomotor dreht sich sowohl im Uhrzeigersinn als auch gegen den Uhrzeigersinn.
Code-Erklärung
Schau dir die zeilenweise Erklärung an, die in den Kommentaren des Quellcodes enthalten ist!
Wie man die Geschwindigkeit eines Servomotors steuert
Durch die Nutzung der Funktionen map() und millis() können wir die Geschwindigkeit eines Servomotors auf gleichmäßige Weise anpassen, ohne dabei anderen Code zu behindern.
Video Tutorial
Wir erwägen die Erstellung von Video-Tutorials. Wenn Sie Video-Tutorials für wichtig halten, abonnieren Sie bitte unseren YouTube-Kanal , um uns zu motivieren, die Videos zu erstellen.