Arduino Nano - Endschalter für Schrittmotor
Dieses Tutorial zeigt dir, wie man einen Arduino Nano verwendet, um einen Schrittmotor über einen Endschalter und einen L298N-Treiber zu steuern. Genauer gesagt behandeln wir Folgendes:
- Wie programmiert man ein Arduino Nano, um den Schrittmotor zu stoppen, wenn ein Endschalter berührt wird.
- Wie programmiert man ein Arduino Nano, um die Drehrichtung des Schrittmotors zu ändern, wenn ein Endschalter berührt wird.
- Wie programmiert man ein Arduino Nano, um die Drehrichtung des Schrittmotors durch zwei Endschalter zu ändern, die gegenüberliegend installiert sind.
Erforderliche Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Über Schrittmotor und Endschalter
Wenn Sie mit dem Schrittmotor und dem Endschalter (einschließlich Pinbelegung, Funktionalität und Programmierung) nicht vertraut sind, können Ihnen die folgenden Tutorials beim Lernen helfen:
- Arduino Nano - Limit Switch tutorial
- Arduino Nano - Stepper Motor tutorial
Verdrahtungsdiagramm
Dieses Tutorial liefert das Verdrahtungsschema für zwei Fälle: einen Schrittmotor + einen Endschalter, einen Schrittmotor + zwei Endschalter.
- Verdrahtungsdiagramm zwischen ESP8266, Schrittmotor und einem Endschalter.
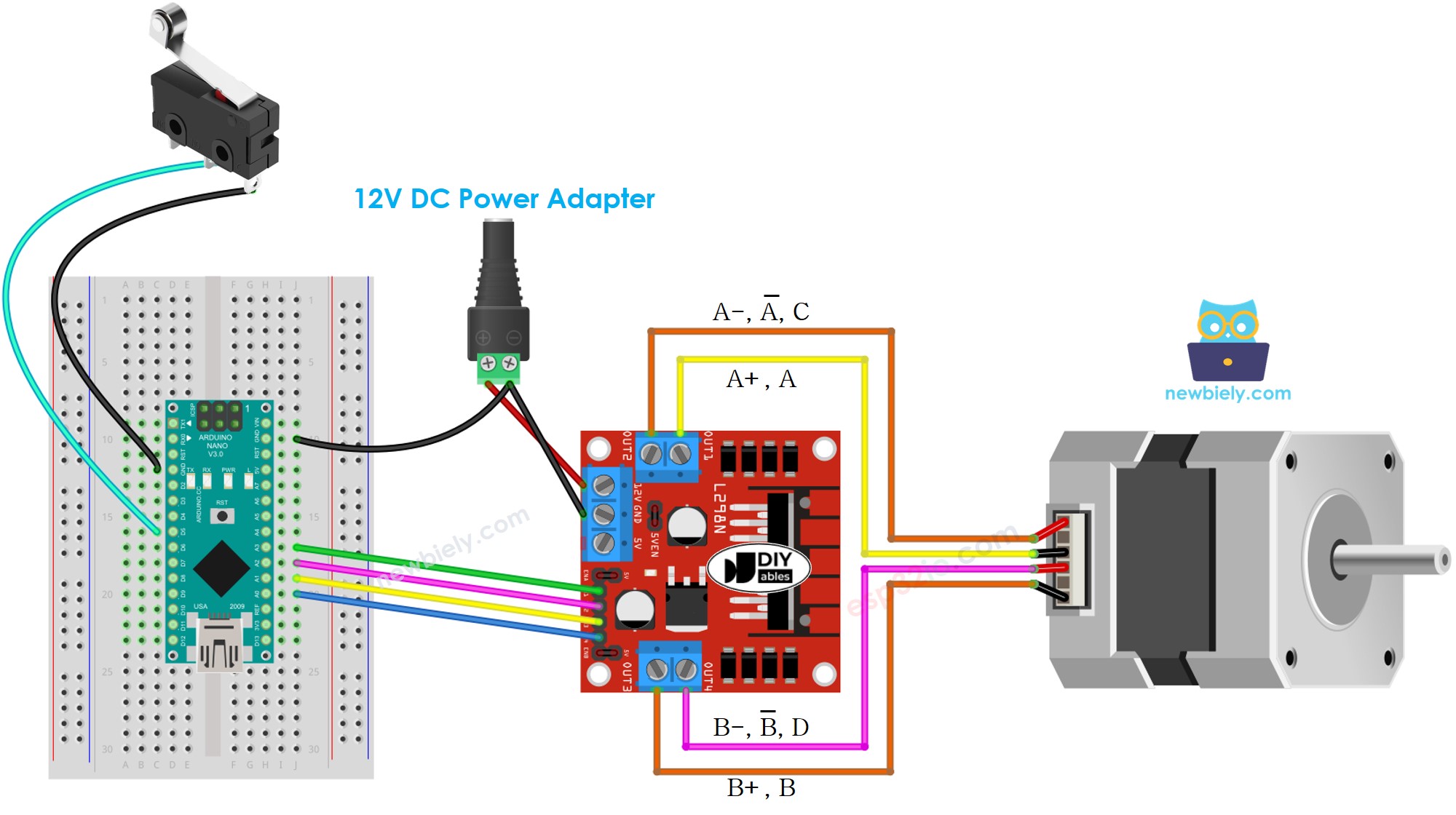
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
- Schaltplan zwischen dem ESP8266, dem Schrittmotor und zwei Endschaltern.
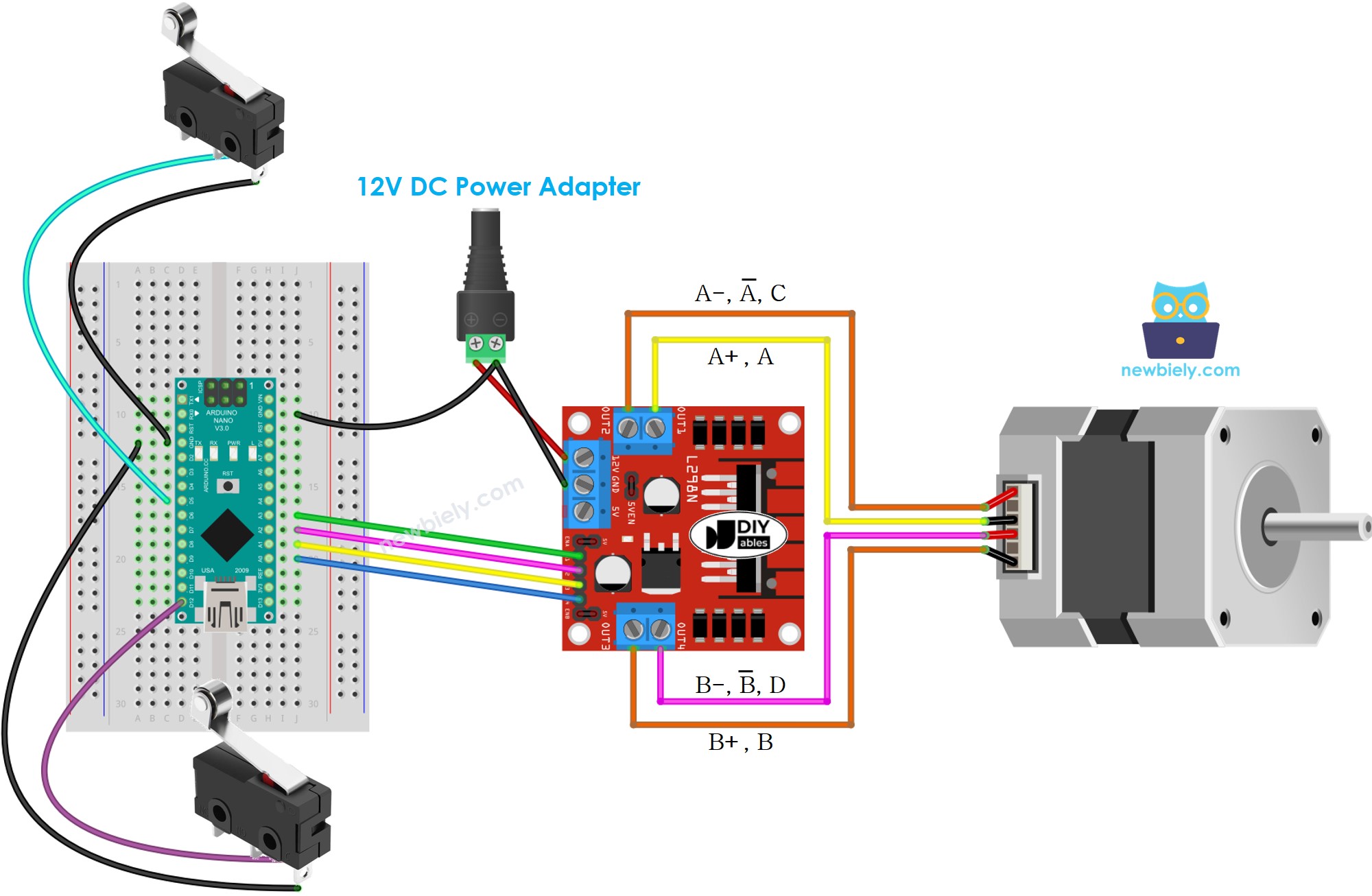
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
Siehe Der beste Weg, den Arduino Nano und andere Komponenten mit Strom zu versorgen.
※ Notiz:
Die Verkabelung zwischen dem Schrittmotor und dem L298N kann je nach Typ des Schrittmotors variieren. Um eine erfolgreiche Verbindung zu gewährleisten, lesen Sie bitte das Arduino Nano - Stepper Motor Tutorial für Anweisungen dazu, wie der Schrittmotor an den L298N-Motortreiber angeschlossen wird.
Arduino Nano-Quellcode – Schrittmotor durch Endschalter stoppen
Man kann einen Schrittmotor auf verschiedene Arten stoppen:
- Rufen Sie die Funktion stepper.stop() auf: Dies wird den Motor nicht sofort zum Stillstand bringen, sondern dafür sorgen, dass er allmählich verlangsamt wird
- Rufen Sie nicht die Funktion stepper.run() auf: Dies wird dazu führen, dass der Schrittmotor sofort zum Stillstand kommt
Der untenstehende Code bewirkt, dass sich ein Schrittmotor kontinuierlich dreht, bis ein Endschalter betätigt wird.
Schnelle Schritte
- Verbinde das Arduino Nano mit einem Computer über ein USB-Kabel.
- Öffne die Arduino IDE, wähle das richtige Board und den richtigen Port.
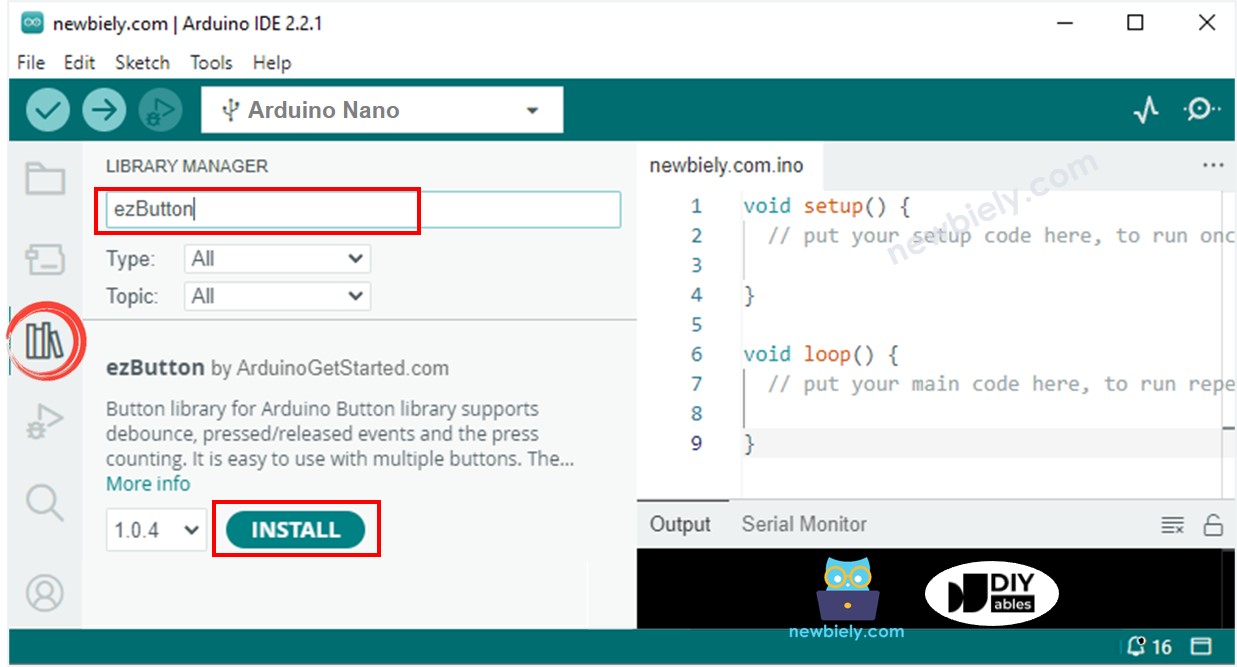
- Klicke auf das Bibliotheken-Symbol in der linken Leiste der Arduino IDE.
- Suche nach “ezButton” und finde die Button-Bibliothek von ArduinoGetStarted.com.
- Drücke den Install-Button, um die ezButton-Bibliothek zu installieren.
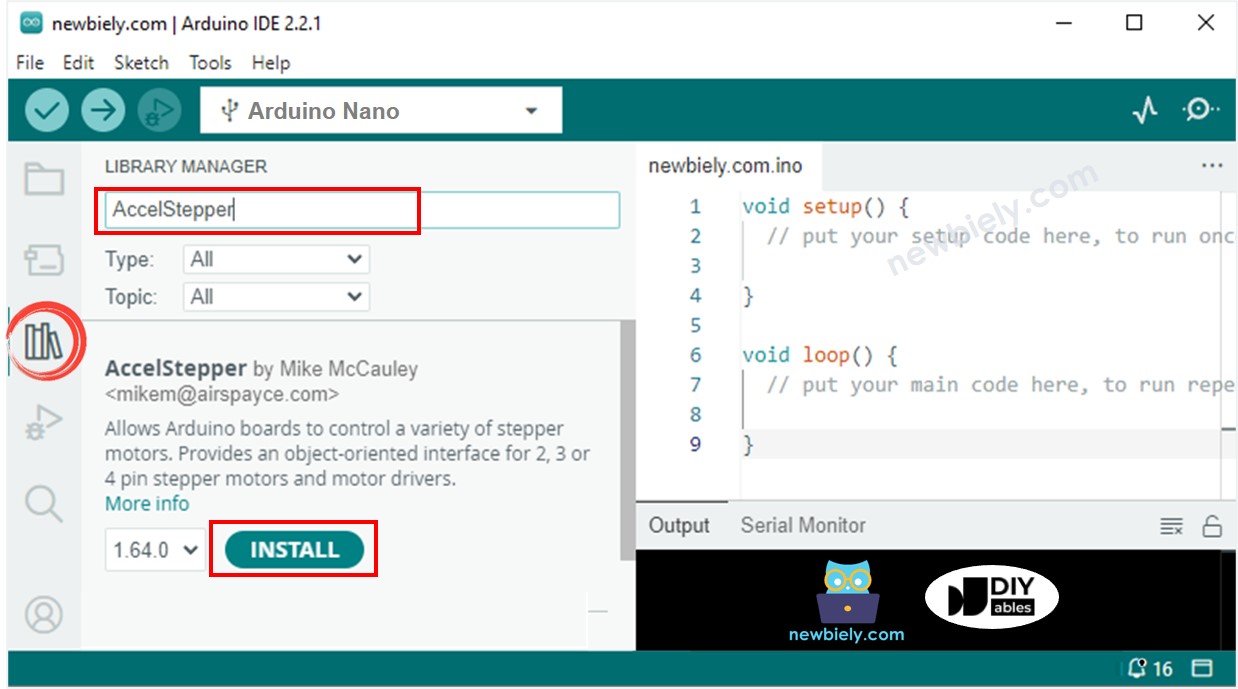
- Suchen Sie nach “AccelStepper” und finden Sie die von Mike McCauley erstellte AccelStepper-Bibliothek.
- Drücken Sie dann die Schaltfläche Installieren, um sie hinzuzufügen.
- Kopieren Sie den obigen Code und öffnen Sie ihn in der Arduino IDE.
- Klicken Sie auf die Hochladen-Schaltfläche in der Arduino IDE, um den Code zu kompilieren und auf den Arduino Nano hochzuladen.
- Wenn die Verkabelung korrekt ist, sollte sich der Motor im Uhrzeigersinn drehen.
- Wenn der Endschalter betätigt wird, sollte der Motor sofort anhalten.
- Das auf dem seriellen Monitor angezeigte Ergebnis sollte wie folgt aussehen.
Code-Erklärung
Schau dir die zeilenweise Erklärung an, die in den Kommentaren des Quellcodes enthalten ist!
Arduino Nano Code - Drehrichtung des Schrittmotors durch einen Grenzschalter ändern
Ein Schrittmotor wird kontinuierlich gedreht, und seine Drehrichtung wird geändert, wenn ein Endschalter berührt wird. Dies wird durch den folgenden Code erreicht:
Schnelle Schritte
- Kopieren Sie den Code und öffnen Sie ihn mit der Arduino-IDE.
- Klicken Sie in der IDE auf die Hochladen-Schaltfläche, um den Code auf den Arduino Nano hochzuladen.
- Wenn die Verkabelung korrekt ist, dreht sich der Motor im Uhrzeigersinn.
- Berühren Sie den Endschalter, und die Drehrichtung des Schrittmotors wird auf Gegen-Uhrzeigersinn umgekehrt.
- Berühren Sie den Endschalter erneut, und der Schrittmotor wird sich im Uhrzeigersinn drehen.
- Das Ergebnis im Serial Monitor sollte so aussehen.
Arduino Nano Code - Ändern Sie die Richtung des Schrittmotors durch zwei Endschalter
Lassen Sie einen Schrittmotor kontinuierlich drehen und die Drehrichtung wechseln, wenn einer der beiden Endschalter betätigt wird.
Schnelle Schritte
- Kopieren Sie den obigen Code und öffnen Sie ihn in der Arduino IDE.
- Klicken Sie auf die Schaltfläche Hochladen, um den Code an das Arduino Nano zu senden.
- Wenn die Verkabelung korrekt ist, sollte sich der Motor im Uhrzeigersinn drehen.
- Wenn Sie Grenzschalter 1 berühren, sollte sich die Drehrichtung des Schrittmotors gegen den Uhrzeigersinn ändern.
- Wenn Sie Grenzschalter 2 berühren, sollte sich die Drehrichtung des Schrittmotors wieder auf den Uhrzeigersinn ändern.
- Das Ergebnis im seriellen Monitor sollte so aussehen.
Video Tutorial
Wir erwägen die Erstellung von Video-Tutorials. Wenn Sie Video-Tutorials für wichtig halten, abonnieren Sie bitte unseren YouTube-Kanal , um uns zu motivieren, die Videos zu erstellen.