Arduino Nano ESP32 Mehrere Web-Apps mit DIYables ESP32 WebApps Library
Überblick
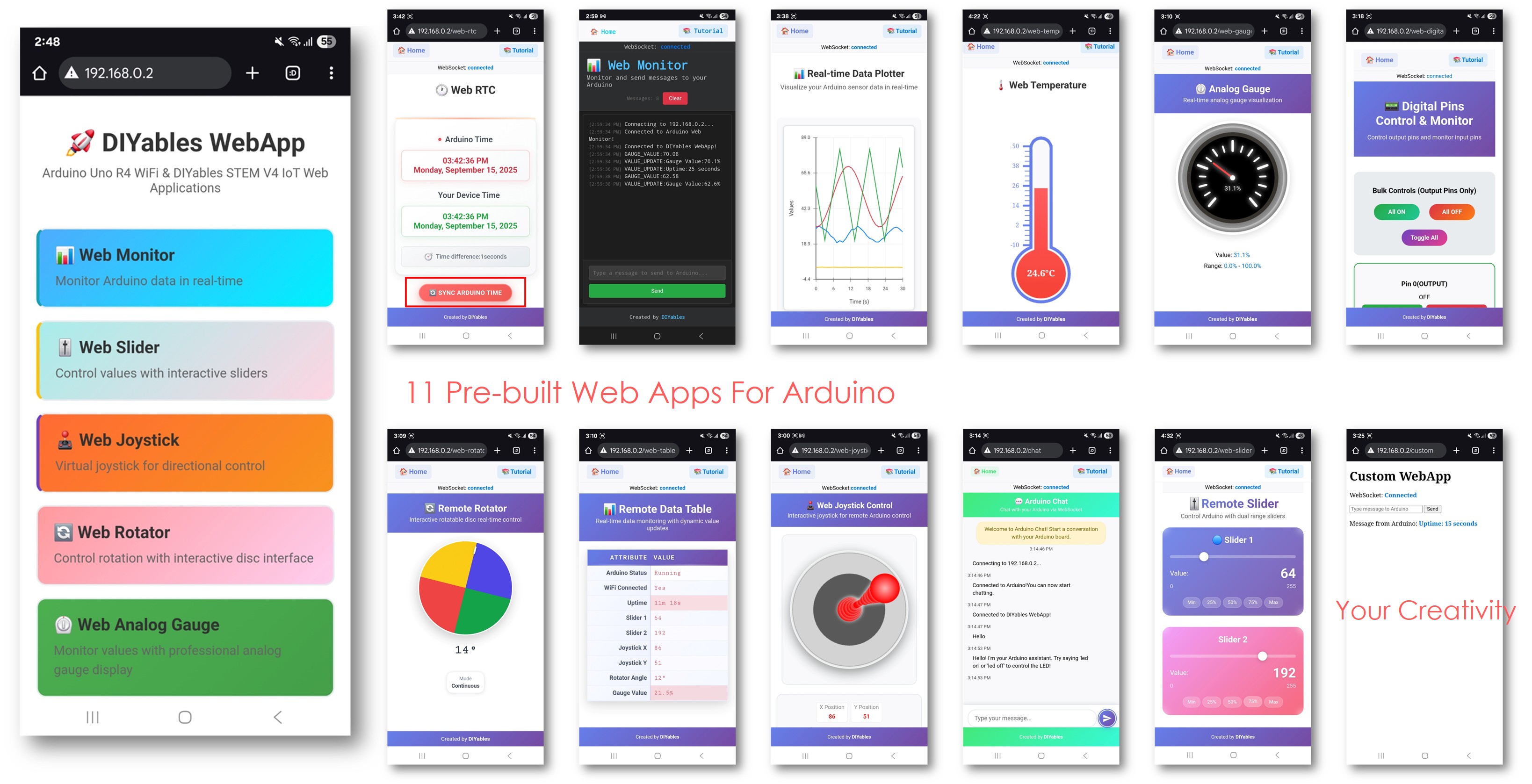
Dieses Tutorial zeigt dir, wie du mehrere Webanwendungsseiten gleichzeitig auf einem Arduino Nano ESP32 mit der DIYables ESP32 WebApps Library ausführst. Jede Seite ist unabhängig; du registrierst nur die, die dein Projekt benötigt. Die Startseite listet alle registrierten Apps automatisch auf.
Was dieses Tutorial abdeckt
Mehrere Seitenobjekte mit einer Serverinstanz registrieren
Zustandsvariablen konfigurieren, die auf mehreren Seiten gemeinsam genutzt werden
Digitale Pin-Modi für die Web-Seite mit digitalen Pins vorkonfigurieren
Joystick-Empfindlichkeit und Automatisches Zurücksetzen aus der Skizze konfigurieren
Offenlegung: Einige der in diesem Abschnitt bereitgestellten Links sind Amazon-Affiliate-Links. Wir können eine Provision für Käufe erhalten, die über diese Links getätigt werden, ohne zusätzliche Kosten für Sie. Wir schätzen Ihre Unterstützung.
Verbinde das Arduino Nano ESP32-Board mit deinem Computer über ein USB-Kabel.
Starte die Arduino IDE auf deinem Computer.
Wähle das entsprechende Board (z. B. Arduino Nano ESP32) und COM-Port.
Navigiere zum Symbol Bibliotheken in der linken Navigationsleiste der Arduino IDE.
Suche "DIYables ESP32 WebApps", dann finde die DIYables ESP32 WebApps Library von DIYables
Klicke auf die Schaltfläche Installieren, um die Bibliothek zu installieren.
Search for DIYables ESP32 WebApps created by DIYables and click the Install button.
Newbiely | Arduino IDE 2.3.8
──
☐
✕
File
Edit
Sketch
Tools
Help
Arduino Nano ESP32
Library Manager
DIYables ESP32 WebApps
Type:
All
Topic:
All
DIYables ESP32 WebAppsby DIYables
A comprehensive library designed for ESP32 that provides multiple professional web applications including Web Monitor, Chat, Digital Pin Control, Sliders, Joystick, Analog Gauge, Rotator Control, and Temperature Display via WebSocket communication. Features modular architecture for memory efficiency, automatic config handling, and perfect for IoT projects, robotics, sensor monitoring, servo/stepper control, temperature monitoring, and remote ESP32 control.
More info
1.0.1
INSTALL
Newbiely.ino
···
1
voidsetup() {
Output
Serial Monitor
Ln 1, Col 1
Arduino Nano ESP32 on COM15
1
Du wirst aufgefordert, einige andere Bibliotheksabhängigkeiten zu installieren
Klicke auf die Schaltfläche Alle installieren, um alle Bibliotheksabhängigkeiten zu installieren.
Gehe in der Arduino IDE zu Datei Beispiele DIYables ESP32 WebApps MultipleWebApps, oder kopiere den obigen Code und füge ihn in den Editor der Arduino IDE ein
/* * DIYables WebApp Library - Multiple WebApps Example * * This example demonstrates multiple web apps of the DIYables WebApp library: * - Home page with links to multiple web apps * - Web Monitor: Real-time serial monitoring via WebSocket * - Web Slider: Dual slider control * - Web Joystick: Interactive joystick control * - Web Rotator: Interactive rotatable disc control * - Web Analog Gauge: Professional circular gauge for sensor monitoring * - Web Table: Two-column data table with real-time updates * - Web Plotter: See WebPlotter example for real-time data visualization * * Features: * - Simplified callback system - no manual command parsing needed * - Automatic state synchronization and JSON handling * - All protocol details handled by the library * - Template for hardware control * * Hardware: ESP32 Boards * * Setup: * 1. Update WiFi credentials below * 2. Upload the sketch to your Arduino * 3. Open Serial Monitor to see the IP address * 4. Navigate to the IP address in your web browser */#include <DIYables_ESP32_Platform.h>#include <DIYablesWebApps.h>// WiFi credentials - UPDATE THESE WITH YOUR NETWORKconstchar WIFI_SSID[] = "YOUR_WIFI_SSID";constchar WIFI_PASSWORD[] = "YOUR_WIFI_PASSWORD";// Create WebApp server and page instancesESP32ServerFactory factory;DIYablesWebAppServerwebAppsServer(factory, 80, 81);DIYablesHomePage homePage;DIYablesWebMonitorPage webMonitorPage;DIYablesWebSliderPage webSliderPage;DIYablesWebJoystickPage webJoystickPage(false, 5); // autoReturn=false, sensitivity=5DIYablesWebRotatorPage webRotatorPage(ROTATOR_MODE_CONTINUOUS); // Continuous rotation mode (0-360°)DIYablesWebAnalogGaugePage webAnalogGaugePage(0.0, 100.0, "%"); // Range: 0-100%, units: %DIYablesWebTablePage webTablePage;// Variables to track statesint currentSlider1 = 64; // Slider 1 value (0-255)int currentSlider2 = 128; // Slider 2 value (0-255)int currentJoystickX = 0; // Current joystick X value (-100 to 100)int currentJoystickY = 0; // Current joystick Y value (-100 to 100)int currentRotatorAngle = 0; // Current rotator angle (0-360°)float currentGaugeValue = 50.0; // Current gauge value (0.0-100.0)voidsetup() {Serial.begin(9600);delay(1000);// TODO: Initialize your hardware pins hereSerial.println("DIYables ESP32 WebApp - Multiple Apps Example");// Add all web applications to the serverwebAppsServer.addApp(&homePage);webAppsServer.addApp(&webMonitorPage);webAppsServer.addApp(&webSliderPage);webAppsServer.addApp(&webJoystickPage);webAppsServer.addApp(&webRotatorPage);webAppsServer.addApp(&webAnalogGaugePage);webAppsServer.addApp(&webTablePage);// Add more web apps here (e.g., WebPlotter)// Set 404 Not Found page (optional - for better user experience)webAppsServer.setNotFoundPage(DIYablesNotFoundPage());// Configure table structure (only attribute names, values will be updated dynamically) webTablePage.addRow("Arduino Status"); webTablePage.addRow("WiFi Connected"); webTablePage.addRow("Uptime"); webTablePage.addRow("Slider 1"); webTablePage.addRow("Slider 2"); webTablePage.addRow("Joystick X"); webTablePage.addRow("Joystick Y"); webTablePage.addRow("Rotator Angle"); webTablePage.addRow("Gauge Value");// Start the WebApp serverif (!webAppsServer.begin(WIFI_SSID, WIFI_PASSWORD)) {while (1) {Serial.println("Failed to start WebApp server!");delay(1000); } } setupCallbacks();}void setupCallbacks() {// Web Monitor callback - echo messages back webMonitorPage.onWebMonitorMessage([](const String& message) {Serial.println("Web Monitor: " + message); webMonitorPage.sendToWebMonitor("Arduino received: " + message); });// Web Slider callback - handle slider values webSliderPage.onSliderValueFromWeb([](int slider1, int slider2) {// Store the received values currentSlider1 = slider1; currentSlider2 = slider2;// Print slider values (0-255) without String concatenationSerial.print("Slider 1: ");Serial.print(slider1);Serial.print(", Slider 2: ");Serial.println(slider2);// Update table with new slider values using String() conversion webTablePage.sendValueUpdate("Slider 1", String(slider1)); webTablePage.sendValueUpdate("Slider 2", String(slider2));// TODO: Add your control logic here based on slider values// Examples:// - Control PWM: analogWrite(LED_PIN, slider1);// - Control servos: servo.write(map(slider1, 0, 255, 0, 180));// - Control motor speed: analogWrite(MOTOR_PIN, slider2);// Update gauge based on slider1 value (map 0-255 to 0-100) currentGaugeValue = map(slider1, 0, 255, 0, 100); webAnalogGaugePage.sendToWebAnalogGauge(currentGaugeValue);char gaugeStr[16]; snprintf(gaugeStr, sizeof(gaugeStr), "%.1f%%", currentGaugeValue); webTablePage.sendValueUpdate("Gauge Value", String(gaugeStr)); });// Handle slider value requests webSliderPage.onSliderValueToWeb([]() { webSliderPage.sendToWebSlider(currentSlider1, currentSlider2); });// Web Joystick callback - handle joystick movement webJoystickPage.onJoystickValueFromWeb([](int x, int y) {// Store the received values currentJoystickX = x; currentJoystickY = y;// Print joystick position values (-100 to +100)Serial.print("Joystick - X: ");Serial.print(x);Serial.print(", Y: ");Serial.println(y);Serial.print(x);Serial.print(", Y: ");Serial.println(y);// Update table with new joystick values webTablePage.sendValueUpdate("Joystick X", String(x)); webTablePage.sendValueUpdate("Joystick Y", String(y));// TODO: Add your control logic here based on joystick position// Examples:// - Control motors: if (x > 50) { /* move right */ }// - Control servos: servo.write(map(y, -100, 100, 0, 180));// - Control LEDs: analogWrite(LED_PIN, map(abs(x), 0, 100, 0, 255)); });// Handle joystick values requests (when web page loads/reconnects) webJoystickPage.onJoystickValueToWeb([]() { webJoystickPage.sendToWebJoystick(currentJoystickX, currentJoystickY); });// Web Rotator callback - handle rotation angle changes webRotatorPage.onRotatorAngleFromWeb([](float angle) {// Store the received angle currentRotatorAngle = (int)angle;// Print rotator angle (0-360°)Serial.println("Rotator angle: " + String(angle) + "°");// Update table with new rotator angle webTablePage.sendValueUpdate("Rotator Angle", String(angle, 0) + "°");// TODO: Add your control logic here based on rotator angle// Examples:// - Control servo: servo.write(map(angle, 0, 360, 0, 180));// - Control stepper motor: stepper.moveTo(angle);// - Control directional LED strip: setLEDDirection(angle); });// Handle analog gauge value requests (when web page loads/reconnects) webAnalogGaugePage.onGaugeValueRequest([]() { webAnalogGaugePage.sendToWebAnalogGauge(currentGaugeValue); });// Handle table data requests (when web page loads/reconnects) webTablePage.onTableValueRequest([]() {// Send initial values to the table webTablePage.sendValueUpdate("Arduino Status", "Running"); webTablePage.sendValueUpdate("WiFi Connected", "Yes"); webTablePage.sendValueUpdate("Uptime", "0 seconds"); webTablePage.sendValueUpdate("Slider 1", String(currentSlider1)); webTablePage.sendValueUpdate("Slider 2", String(currentSlider2)); webTablePage.sendValueUpdate("Joystick X", String(currentJoystickX)); webTablePage.sendValueUpdate("Joystick Y", String(currentJoystickY)); webTablePage.sendValueUpdate("Rotator Angle", String(currentRotatorAngle) + "°"); webTablePage.sendValueUpdate("Gauge Value", String(currentGaugeValue, 1) + "%"); });}voidloop() {// Handle WebApp server communicationswebAppsServer.loop();// Update table with current uptime every 5 secondsstaticunsignedlong lastUptimeUpdate = 0;if (millis() - lastUptimeUpdate > 5000) { lastUptimeUpdate = millis();unsignedlong uptimeSeconds = millis() / 1000;String uptimeStr = String(uptimeSeconds) + " seconds";if (uptimeSeconds >= 60) { uptimeStr = String(uptimeSeconds / 60) + "m " + String(uptimeSeconds % 60) + "s"; } webTablePage.sendValueUpdate("Uptime", uptimeStr); }// Simulate sensor data updates every 3 secondsstaticunsignedlong lastSensorUpdate = 0;if (millis() - lastSensorUpdate > 3000) { lastSensorUpdate = millis();// Simulate a sensor reading that varies over timefloat sensorValue = 50.0 + 30.0 * sin(millis() / 10000.0); // Oscillates between 20-80 currentGaugeValue = sensorValue;// Update gauge and table webAnalogGaugePage.sendToWebAnalogGauge(currentGaugeValue); webTablePage.sendValueUpdate("Gauge Value", String(currentGaugeValue, 1) + "%"); }// TODO: Add your main application code heredelay(10);}
Klicke auf die Schaltfläche Hochladen in der Arduino IDE, um Code zum Arduino Nano ESP32 hochzuladen
Öffne den seriellen Monitor
Die Ausgabe des seriellen Monitors sollte wie folgt aussehen:
Newbiely | Arduino IDE 2.3.8
──
☐
✕
File
Edit
Sketch
Tools
Help
Arduino Nano ESP32
Newbiely.ino
···
8Serial.println("Hello World!");
Output
Serial Monitor
Message (Enter to send message to 'Arduino Nano ESP32' on 'COM15')
New Line
9600 baud
DIYables WebApp - Multiple Apps Example
INFO: Added app /
INFO: Added app /web-monitor
INFO: Added app /web-slider
INFO: Added app /web-joystick
INFO: Added app /web-rotator
INFO: Added app /web-gauge
INFO: Added app /web-table
DIYables WebApp Library
Platform: Arduino Nano ESP32
Network connected!
IP address: 192.168.0.2
HTTP server started on port 80
Configuring WebSocket server callbacks...
WebSocket server started on port 81
WebSocket URL: ws://192.168.0.2:81
WebSocket server started on port 81
==========================================
DIYables WebApp Ready!
==========================================
Web Interface: http://192.168.0.2
WebSocket: ws://192.168.0.2:81
Available Applications:
Home Page: http://192.168.0.2/
Web Monitor: http://192.168.0.2/web-monitor
Web Slider: http://192.168.0.2/web-slider
Web Joystick: http://192.168.0.2/web-joystick
Web Rotator: http://192.168.0.2/web-rotator
Web Analog Gauge: http://192.168.0.2/web-gauge
Web Table: http://192.168.0.2/web-table
==========================================
Ln 11, Col 1
Arduino Nano ESP32 on COM15
2
Wenn nichts angezeigt wird, drücke den Reset-Button auf dem Board.
Notiere dir die IP-Adresse und gib sie in einen Browser auf einem Gerät ein, das mit demselben WiFi-Netzwerk verbunden ist.
Beispiel: http://192.168.0.2
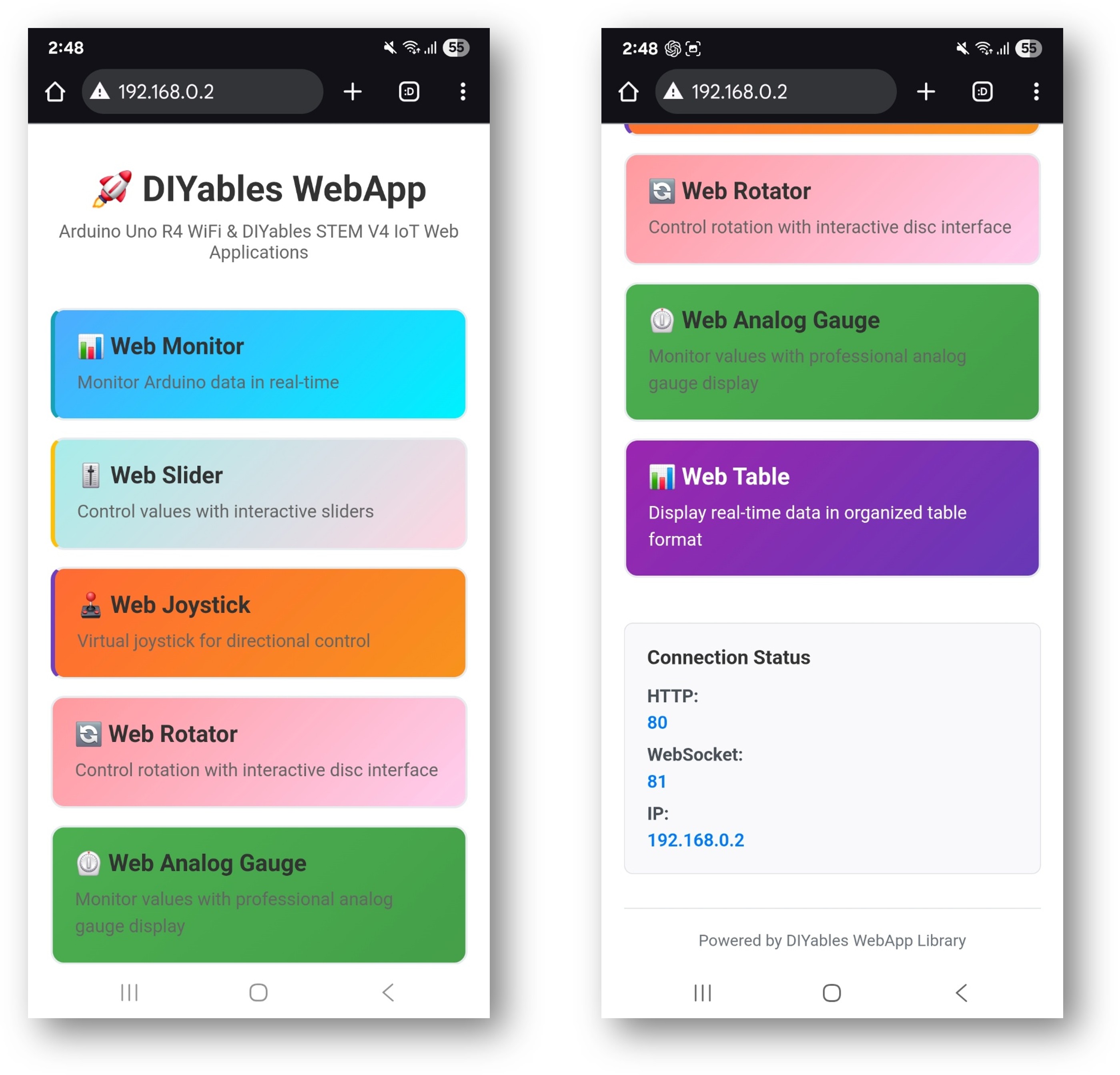
Die Startseite zeigt Karten für alle registrierten Anwendungen:
Wähle eine Karte aus, um diese Anwendung zu öffnen. Jede Seite ist auch direkt über ihre URL erreichbar, z. B. http://192.168.0.2/web-monitor oder http://192.168.0.2/web-slider.
Anwendungs-URLs
Application
URL Path
Home Page
http
//[board-ip]/
Web Monitor
http
//[board-ip]/web-monitor
Web Slider
http
//[board-ip]/web-slider
Web Joystick
http
//[board-ip]/web-joystick
Web Rotator
http
//[board-ip]/web-rotator
Web Analog Gauge
http
//[board-ip]/web-gauge
Web Table
http
//[board-ip]/web-table
Konfigurationsdetails
Einrichtung der digitalen Pins
Ausgabe-Pins können vom Browser aus geschrieben werden; Eingangs-Pins zeigen ihren aktuellen Status an:
webDigitalPinsPage.enablePin(2, WEB_PIN_OUTPUT); // General outputwebDigitalPinsPage.enablePin(3, WEB_PIN_OUTPUT); // General outputwebDigitalPinsPage.enablePin(4, WEB_PIN_OUTPUT); // General outputwebDigitalPinsPage.enablePin(13, WEB_PIN_OUTPUT); // Built-in LEDwebDigitalPinsPage.enablePin(8, WEB_PIN_INPUT); // Sensor inputwebDigitalPinsPage.enablePin(9, WEB_PIN_INPUT); // Switch input
Joystick-Konfiguration
// autoReturn=false: joystick stays at released position// sensitivity=5: updates only when movement exceeds 5%DIYablesWebJoystickPage webJoystickPage(false, 5);
Gemeinsame Zustandsvariablen
Zustandsvariablen halten alle Seiten konsistent mit den tatsächlichen Hardwarewerten:
int pinStates[16] = { LOW }; // Digital pin states for pins 0-13int currentSlider1 = 64; // Slider 1 value (0-255), starts at 25%int currentSlider2 = 128; // Slider 2 value (0-255), starts at 50%int currentJoystickX = 0; // Last joystick X (-100 to 100)int currentJoystickY = 0; // Last joystick Y (-100 to 100)
Integrierte Chat-Befehle
Die Beispielskizze verarbeitet die folgenden Chat-Eingaben:
hello — Gibt eine Begrüßung zurück
time — Meldet die Betriebszeit des Boards in Sekunden
status — Meldet Systemstatus und LED-Status
help — Listet erkannte Befehle auf
ledon — Schaltet die eingebaute LED ein
ledoff — Schaltet die eingebaute LED aus
Beispielbeispiel:
User: hello
ESP32: Hello! I'm your Arduino. How can I help you?
User: led on
ESP32: Built-in LED is now ON
User: time
ESP32: I've been running for 1245 seconds.
User: status
ESP32: Status: Running smoothly! LED is ON
Anpassung des Beispiels
Verwenden des Joysticks mit Motorsteuerung
Ordne die Joystick-X/Y-Werte linker und rechter Motorgeschwindigkeit mit dem Callback zu:
Jede registrierte Seite erhöht die Flash- und RAM-Nutzung. Entferne Seiten, die dein Projekt nicht verwendet. Das modulare Design bedeutet, dass das Aufrufen von addApp() nur für die erforderlichen Seiten ausreicht – unbenutzten Seitenklassen werden nicht verknüpft.
Sie können gerne den Link zu diesem Tutorial teilen. Bitte verwenden Sie jedoch unsere Inhalte nicht auf anderen Websites. Wir haben viel Mühe und Zeit in die Erstellung der Inhalte investiert, bitte respektieren Sie unsere Arbeit!