Arduino Nano ESP32 Web-Regler mit der DIYables ESP32 WebApps-Bibliothek
Übersicht
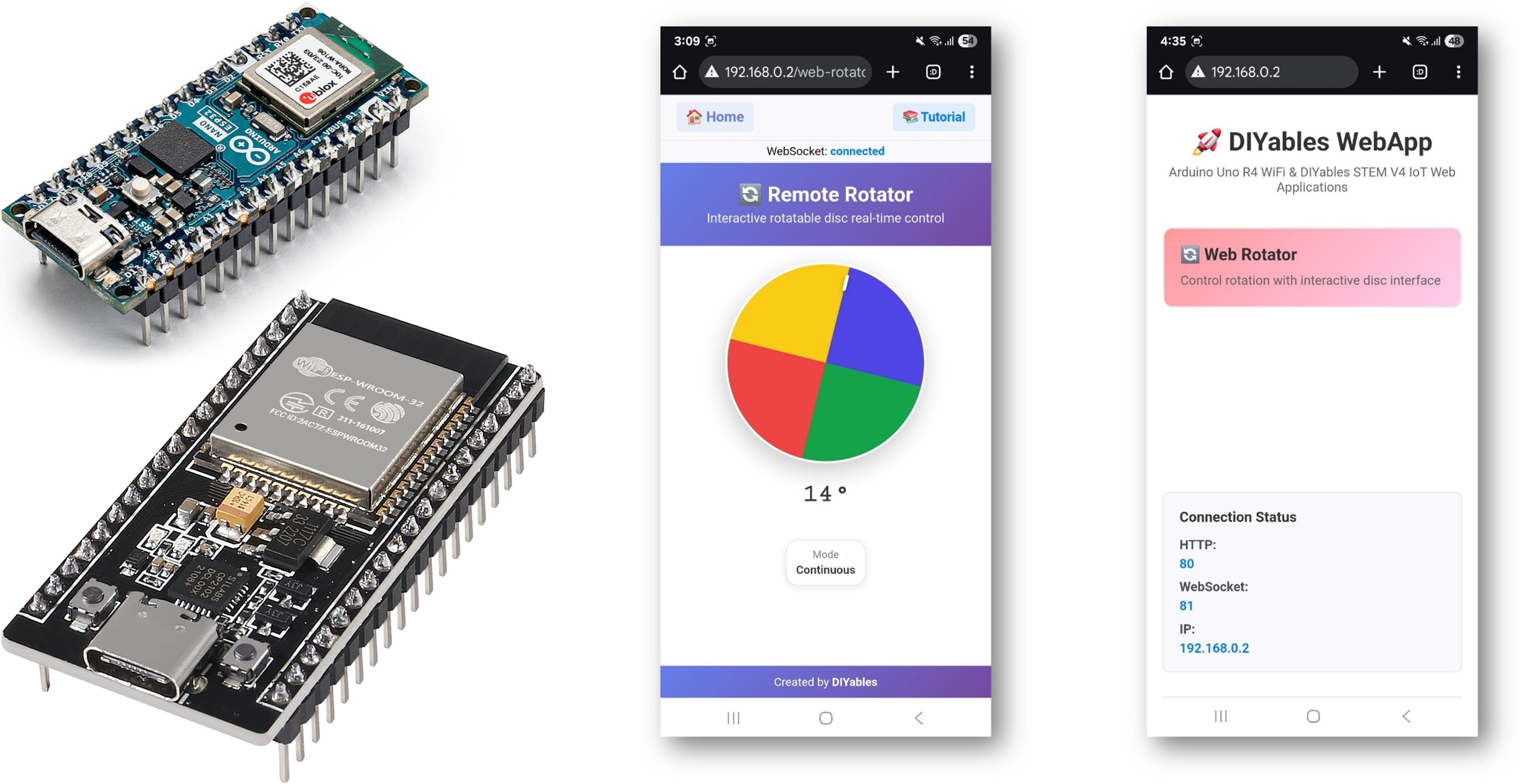
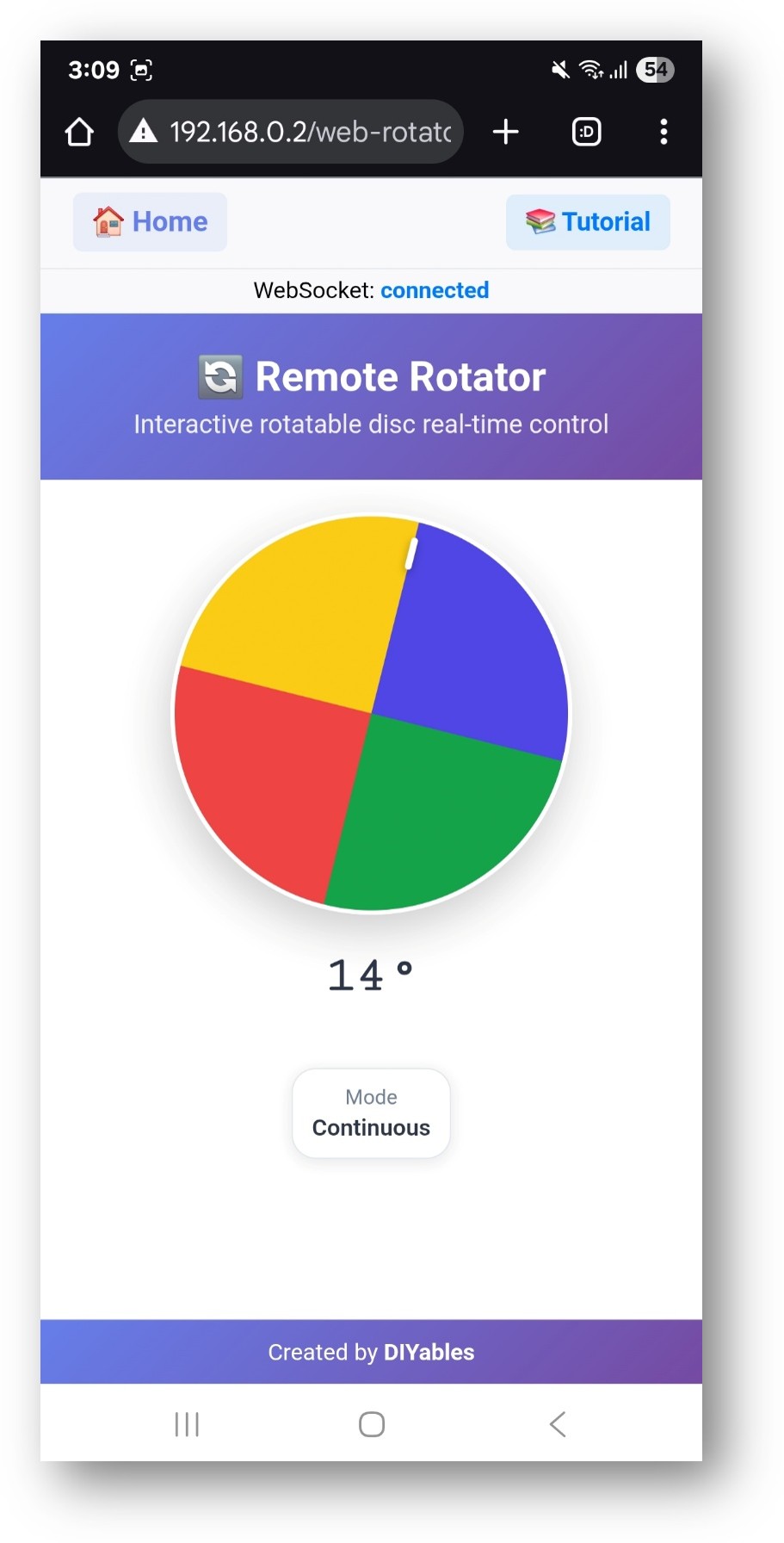
Dieses Tutorial behandelt die Klasse DIYablesWebRotatorPage aus der DIYables ESP32 WebApps-Bibliothek. Die Browserseite zeigt eine ziehbare Disc an, die ihren aktuellen Winkel über WebSocket an den Arduino Nano ESP32 meldet. Die Disc arbeitet entweder im kontinuierlichen Modus (0–360°) oder im begrenzten Bereichsmodus. Die Konfiguration wird im Konstruktor eingestellt und wird beim Verbinden automatisch an den Browser gesendet.
Sehen Sie sich dieses Schritt-für-Schritt-Video-Tutorial an, das zeigt, wie Sie einen Servomotor mit der Web-Regler-App verwenden:
Was dieses Tutorial behandelt
- Auswahl zwischen kontinuierlichen und begrenzten Rotationsmodi
- Empfang von Winkelwerten in einem Sketch-Callback
- Antreiben eines Servomotors aus dem gemeldeten Winkel
- Übermittlung des aktuellen Winkels an neu verbundene Browser
Erforderliche Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Kaufhinweis: Falls Sie mehrere Servomotoren verwenden möchten, empfehlen wir die Verwendung des PCA9685 16 Channel PWM Servo Driver Module, um MCU-Pins zu sparen und die Verdrahtung zu vereinfachen.
Schritte
Befolgen Sie diese Anweisungen Schritt für Schritt:
- Wenn Sie den Arduino Nano ESP32 zum ersten Mal verwenden, beachten Sie das Tutorial zum Einrichten der Arduino Nano ESP32-Entwicklungsumgebung.
- Verbinden Sie das Arduino Nano ESP32-Board mit Ihrem Computer über ein USB-Kabel.
- Starten Sie die Arduino-IDE auf Ihrem Computer.
- Wählen Sie das entsprechende Board (z.B. Arduino Nano ESP32) und den COM-Port.
- Navigieren Sie zum Symbol Bibliotheken in der linken Leiste der Arduino-IDE.
- Suchen Sie "DIYables ESP32 WebApps", dann finden Sie die DIYables ESP32 WebApps-Bibliothek von DIYables
- Klicken Sie auf die Schaltfläche Installieren, um die Bibliothek zu installieren.
- Search for DIYables ESP32 WebApps created by DIYables and click the Install button.
- Sie werden aufgefordert, einige andere Bibliotheksabhängigkeiten zu installieren
- Klicken Sie auf die Schaltfläche Alle installieren, um alle Bibliotheksabhängigkeiten zu installieren.
- Gehen Sie in der Arduino IDE zu Datei Beispiele DIYables ESP32 WebApps WebRotator Beispiel, oder kopieren Sie den obigen Code und fügen Sie ihn in den Editor der Arduino IDE ein
- Aktualisieren Sie die WiFi-Anmeldeinformationen im Sketch:
- Klicken Sie auf die Schaltfläche Hochladen in der Arduino IDE, um den Code in den Arduino Nano ESP32 hochzuladen
- Öffnen Sie den seriellen Monitor
- Die Ausgabe des seriellen Monitors sollte wie folgt aussehen:
- Wenn nichts angezeigt wird, drücken Sie die Reset-Taste auf dem Board.
- Geben Sie die IP-Adresse aus dem seriellen Monitor in einen Browser im gleichen Netzwerk ein.
- Beispiel: http://192.168.0.2
- Die Startseite zeigt eine Karte für die Regler-Anwendung:
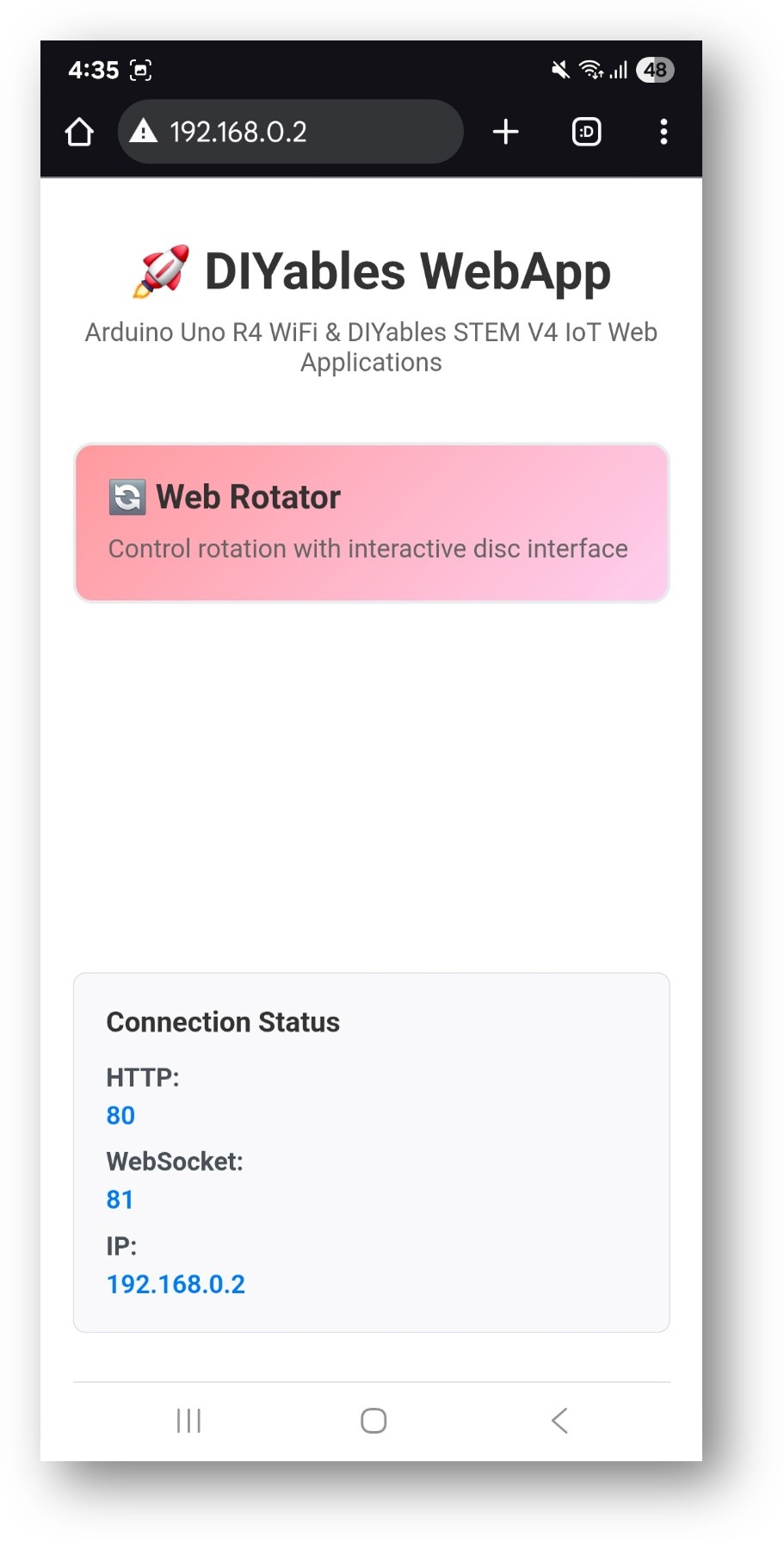
- Wählen Sie die Karte Web-Regler, um die Disc-Steuerungsseite zu öffnen:
- Die Seite ist auch direkt unter http://192.168.0.2/web-rotator erreichbar.
- Ziehen Sie die Disc und beobachten Sie den im seriellen Monitor gemeldeten Winkel.
Rotationsmodi
Kontinuierlicher Modus (vollständig 0–360°)
Modus mit begrenztem Bereich
Callbacks
Empfang von Winkelaktualisierungen
Wird jedes Mal aufgerufen, wenn der Benutzer die Disc dreht:
Übermittlung des Winkels an den Browser
Wird aufgerufen, wenn sich ein Browser verbindet und den aktuellen Winkel anfordert:
Servomotor-Beispiel
Ordnen Sie den Browser-Winkel (0–180°) einem Standard-Servomotor zu:
Fehlerbehebung
Der Disc-Winkel löst den Callback nicht aus
- Bestätigen Sie, dass onRotatorValueFromWeb vor webAppsServer.begin() registriert ist
- Überprüfen Sie, ob der WebSocket-Status im Browser "verbunden" anzeigt
Servomotor bewegt sich in die falsche Position
- Überprüfen Sie, dass der Winkelbereich mit dem physischen Bereich des Servomotors übereinstimmt (normalerweise 0–180°)
- Verwenden Sie den Modus mit begrenztem Bereich, wenn der mechanische Bereich weniger als 360° beträgt
Seite nicht erreichbar
- Überprüfen Sie die IP-Adresse aus dem seriellen Monitor
- Stellen Sie sicher, dass sich Board und Browser-Gerät im gleichen 2,4-GHz-Netzwerk befinden