ESP32 - MG996R
In diesem Tutorial lernen wir, wie man den MG996R-Hochdrehmoment-Servomotor mit dem ESP32 verwendet.
Erforderliche Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables ESP32 Starter-Kit (ESP32 enthalten) | |
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Kaufhinweis: Falls Sie mehrere Servomotoren verwenden möchten, empfehlen wir die Verwendung des PCA9685 16 Channel PWM Servo Driver Module, um MCU-Pins zu sparen und die Verdrahtung zu vereinfachen.
Über Servomotor
Der MG996R-Servomotor ist ein Hochdrehmoment-Servomotor mit einer Tragkraft von bis zu 15 kg. Der Motor kann seinen Arm von 0° bis 180° drehen und so eine präzise Steuerung der Winkelposition ermöglichen. Für grundlegende Informationen über Servomotoren lesen Sie bitte das Tutorial ESP32 - Servomotor.
Pinbelegung
Der MG996R-Servomotor, der in diesem Beispiel verwendet wird, verfügt über drei Pins:
- VCC-Pin: (in der Regel rot) muss mit VCC verbunden werden (4,8 V – 7,2 V)
- GND-Pin: (in der Regel schwarz oder braun) muss mit GND (0 V) verbunden werden
- Signal-Pin: (in der Regel gelb oder orange) empfängt das PWM-Steuersignal vom Pin des ESP32

Verdrahtungsdiagramm
Da der MG996R ein Hochdrehmoment-Servomotor ist, zieht er viel Leistung. Wir sollten diesen Motor nicht über den 5-V-Pin des ESP32 mit Strom versorgen. Stattdessen müssen wir das externe Netzteil für den MG996R-Servomotor verwenden.
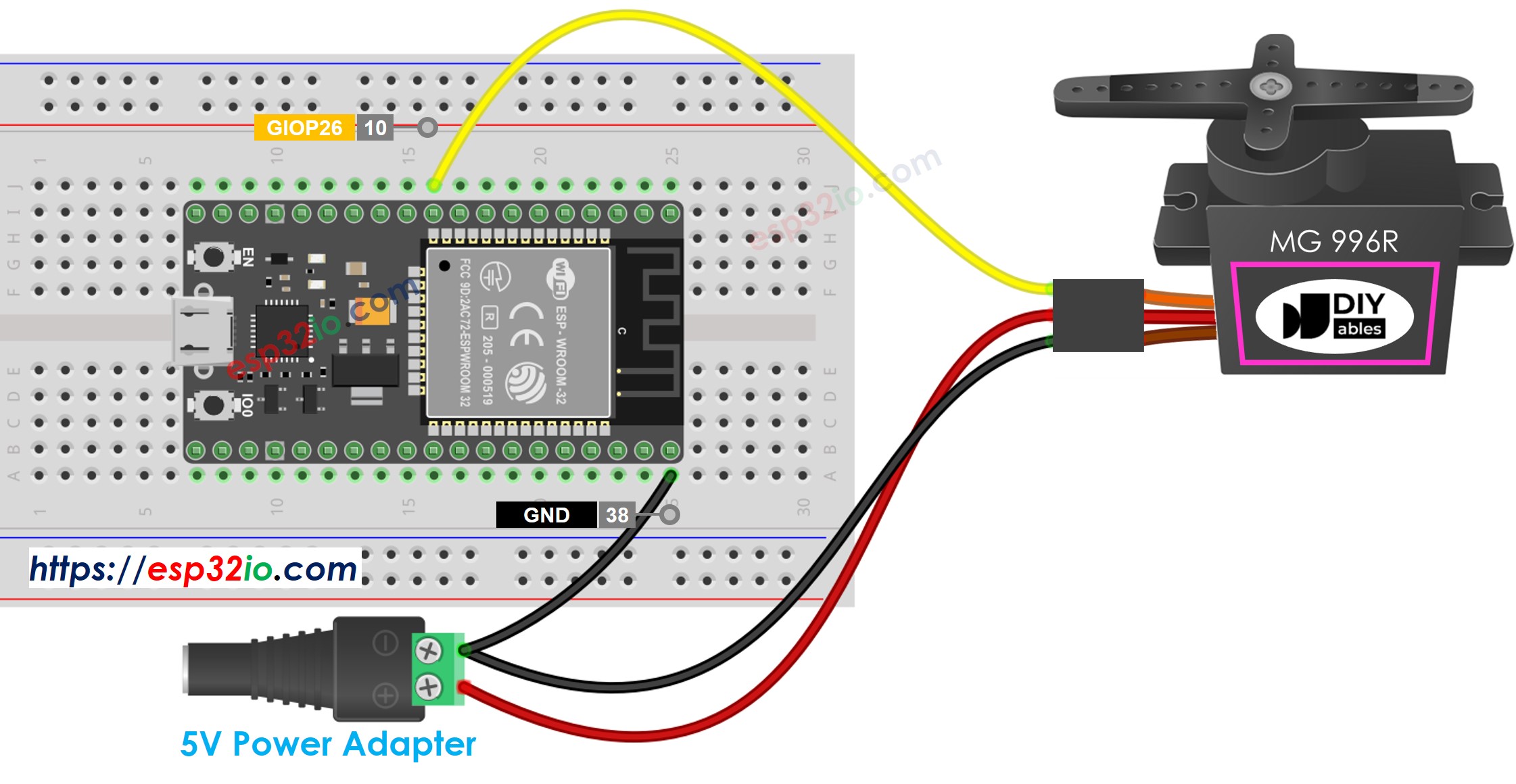
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
Wenn Sie nicht wissen, wie Sie ESP32 und andere Komponenten mit Strom versorgen, finden Sie Anleitungen im folgenden Tutorial: Wie man ESP32 mit Strom versorgt.
ESP32-Code
Schnelle Schritte
- Falls dies das erste Mal ist, dass Sie ESP32 verwenden, sehen Sie sich an, wie Sie die Umgebung für ESP32 in der Arduino IDE einrichten.
- Verkabeln Sie gemäß dem obigen Bild.
- Verbinden Sie das ESP32-Board mit Ihrem PC über ein Micro-USB-Kabel.
- Öffnen Sie die Arduino IDE auf Ihrem PC.
- Wählen Sie das richtige ESP32-Board (z. B. ESP32 Dev Module) und den COM-Port aus.
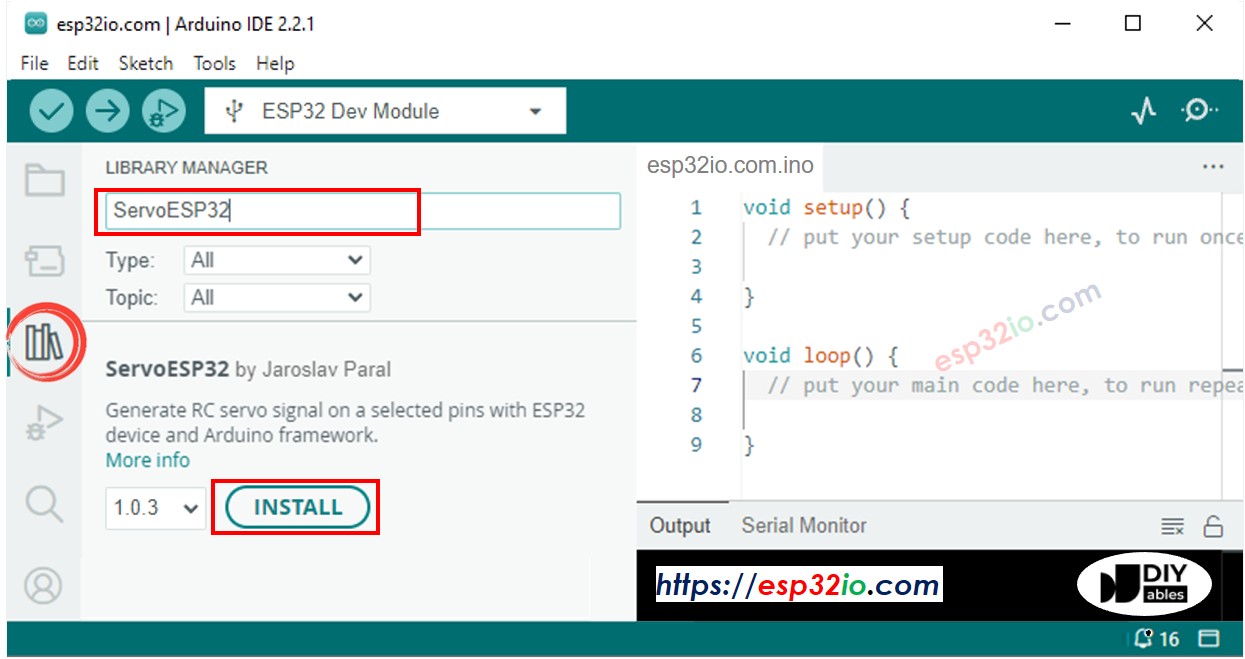
- Klicken Sie auf das Libraries-Symbol in der linken Leiste der Arduino IDE.
- Geben Sie ESP32Servo in das Suchfeld ein, suchen Sie dann nach der Servo-Bibliothek von Kevin Harrington,John K. Bennett.
- Klicken Sie auf den Install-Button, um die Servo-Bibliothek für ESP32 zu installieren.
- Schließen Sie den ESP32 über ein USB-Kabel an den PC an
- Öffnen Sie die Arduino-IDE, wählen Sie das passende Board und den richtigen Port aus
- Kopieren Sie den obigen Code und öffnen Sie ihn mit der Arduino-IDE
- Klicken Sie auf die Schaltfläche Hochladen in der Arduino-IDE, um den Code auf den ESP32 hochzuladen

- Siehe das Ergebnis: Servomotor dreht sich langsam von 0° nach 180° und dreht sich dann langsam wieder von 180° auf 0°.
Code-Erklärung
Die Erklärung finden Sie in der Kommentarzeile des obigen Arduino-Codes.
Wie man die Geschwindigkeit eines Servomotors steuert
Durch die Verwendung der Funktionen map() und millis() können wir die Geschwindigkeit des Servomotors sanft steuern, ohne anderen Code zu blockieren.
Video Tutorial
Wir erwägen die Erstellung von Video-Tutorials. Wenn Sie Video-Tutorials für wichtig halten, abonnieren Sie bitte unseren YouTube-Kanal , um uns zu motivieren, die Videos zu erstellen.