ESP32 - Schallsensor - Servomotor
In diesem Tutorial werden wir untersuchen, wie man den Schallsensor verwendet, um einen Servomotor zu steuern. Genauer gesagt werden wir zwei spannende Anwendungen näher betrachten:
- Schallschalter: Wenn Schall erkannt wird (z. B. Klopfen), dreht der ESP32 den Servomotor auf 90 Grad, wenn er sich bei 0 Grad befindet, und auf 0 Grad, wenn er sich bei 90 Grad befindet.
- Schallaktiviertes Relais: Beim Erkennen von Schall dreht der ESP32 den Servomotor für eine bestimmte Zeit auf 90 Grad, und danach wieder auf 0 Grad.
Erforderliche Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables ESP32 Starter-Kit (ESP32 enthalten) | |
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Kaufhinweis: Falls Sie mehrere Servomotoren verwenden möchten, empfehlen wir die Verwendung des PCA9685 16 Channel PWM Servo Driver Module, um MCU-Pins zu sparen und die Verdrahtung zu vereinfachen.
Über Servomotor und Schallsensor
Wenn Sie nichts über Servomotoren und Schallsensoren wissen (Pinbelegung, wie sie funktionieren, wie man sie programmiert ...), informieren Sie sich in den folgenden Tutorials darüber:
Verdrahtungsdiagramm
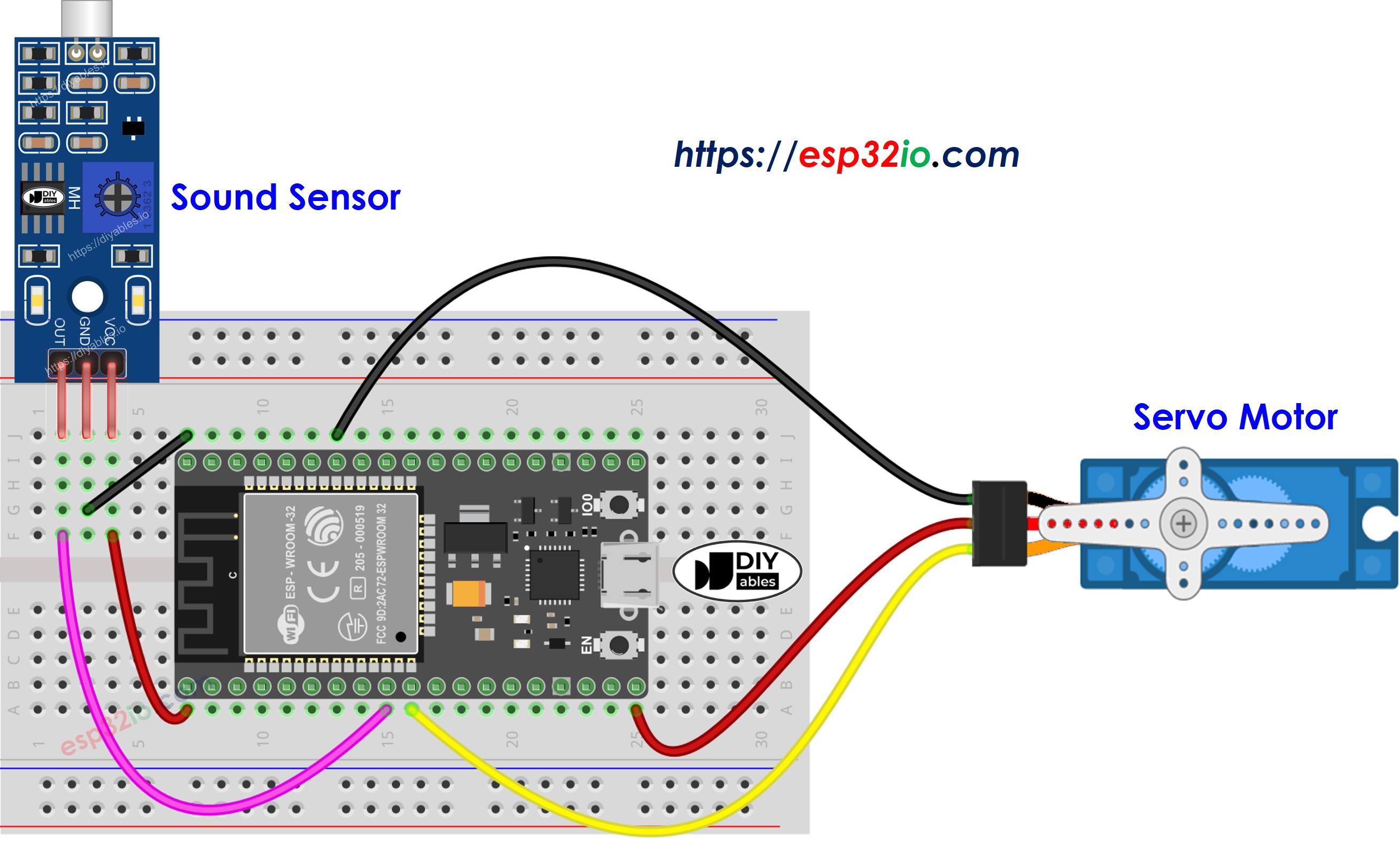
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
Wenn Sie nicht wissen, wie Sie ESP32 und andere Komponenten mit Strom versorgen, finden Sie Anleitungen im folgenden Tutorial: Wie man ESP32 mit Strom versorgt.
ESP32-Code – Sound-Schalter schaltet den Winkel des Servomotors um
Der unten stehende Code wechselt den Winkel des Servomotors bei jeder Tonerkennung zwischen 0 und 90 Grad.
Schnelle Schritte
- Falls Sie ESP32 zum ersten Mal verwenden, sehen Sie sich die Einrichtung der ESP32-Umgebung in der Arduino IDE an.
- Schließen Sie die Verkabelung wie im obigen Bild an.
- Schließen Sie das ESP32-Board über ein Micro-USB-Kabel an Ihren PC an.
- Öffnen Sie die Arduino IDE auf Ihrem PC.
- Wählen Sie das richtige ESP32-Board (z. B. ESP32 Dev Module) und den COM-Port aus.
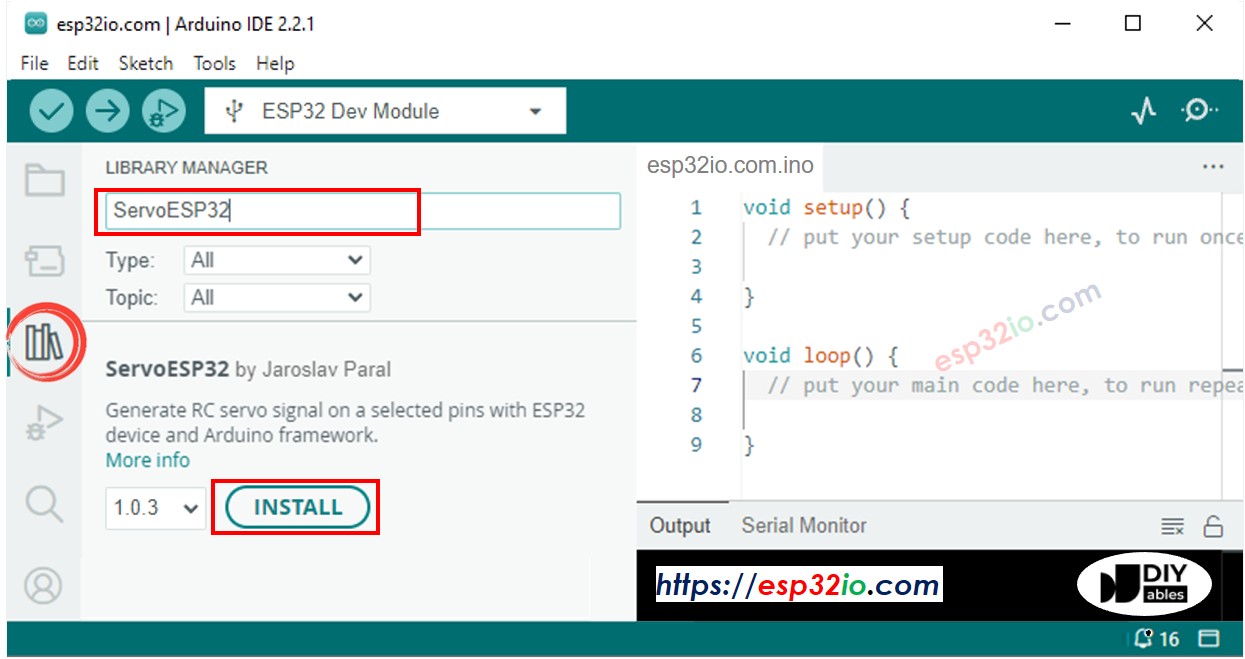
- Klicken Sie auf das Bibliotheken-Symbol in der linken Leiste der Arduino IDE.
- Geben Sie ESP32Servo in das Suchfeld ein, suchen Sie dann nach der Servo-Bibliothek von Kevin Harrington,John K. Bennett.
- Klicken Sie auf den Installieren-Button, um die Servo-Bibliothek für ESP32 zu installieren.
- Schließe den ESP32 über ein USB-Kabel an den PC an
- Öffne die Arduino-IDE, wähle das richtige Board und den richtigen Port aus
- Kopiere den obigen Code und öffne ihn in der Arduino-IDE
- Klicke in der Arduino-IDE auf die Schaltfläche Hochladen, um den Code auf den ESP32 hochzuladen
- Klatsche vor dem Schallsensor in die Hände
- Beobachte die Veränderung des Servomotors
ESP32-Code - geräuschaktivierter Servomotor für einen bestimmten Zeitraum
Der folgende Code dreht den Servomotor für eine bestimmte Zeit auf 90 Grad, wenn ein Ton erkannt wird. Nach Ablauf dieser Zeit wird der Servomotor wieder auf 0 Grad gedreht.
Bitte beachten Sie, dass der oben erwähnte Code die delay()-Funktion aus Gründen der Einfachheit verwendet. Wenn Sie jedoch zusätzlichen Code hinzufügen, kann dieser während der Verzögerung blockiert werden. Um dies zu vermeiden, implementiert der folgende Code einen nicht-blockierenden Ansatz, der die millis()-Funktion anstelle von delay verwendet, um das Blockieren zu verhindern.
Video Tutorial
Wir erwägen die Erstellung von Video-Tutorials. Wenn Sie Video-Tutorials für wichtig halten, abonnieren Sie bitte unseren YouTube-Kanal , um uns zu motivieren, die Videos zu erstellen.