ESP32 - Servomotor mit Drehencoder
In diesem Tutorial lernen wir, wie man den ESP32 programmiert und den Drehencoder verwendet, um den Winkel des Servomotors zu steuern.
Erforderliche Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables ESP32 Starter-Kit (ESP32 enthalten) | |
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Kaufhinweis: Falls Sie mehrere Servomotoren verwenden möchten, empfehlen wir die Verwendung des PCA9685 16 Channel PWM Servo Driver Module, um MCU-Pins zu sparen und die Verdrahtung zu vereinfachen.
Über Servomotor und Drehencoder
Sind Sie nicht mit Servomotoren und Drehgebern vertraut, einschließlich ihrer Pinbelegungen, Funktionalität und Programmierung? Erkunden Sie unten umfassende Tutorials zu diesen Themen:
Verdrahtungsdiagramm
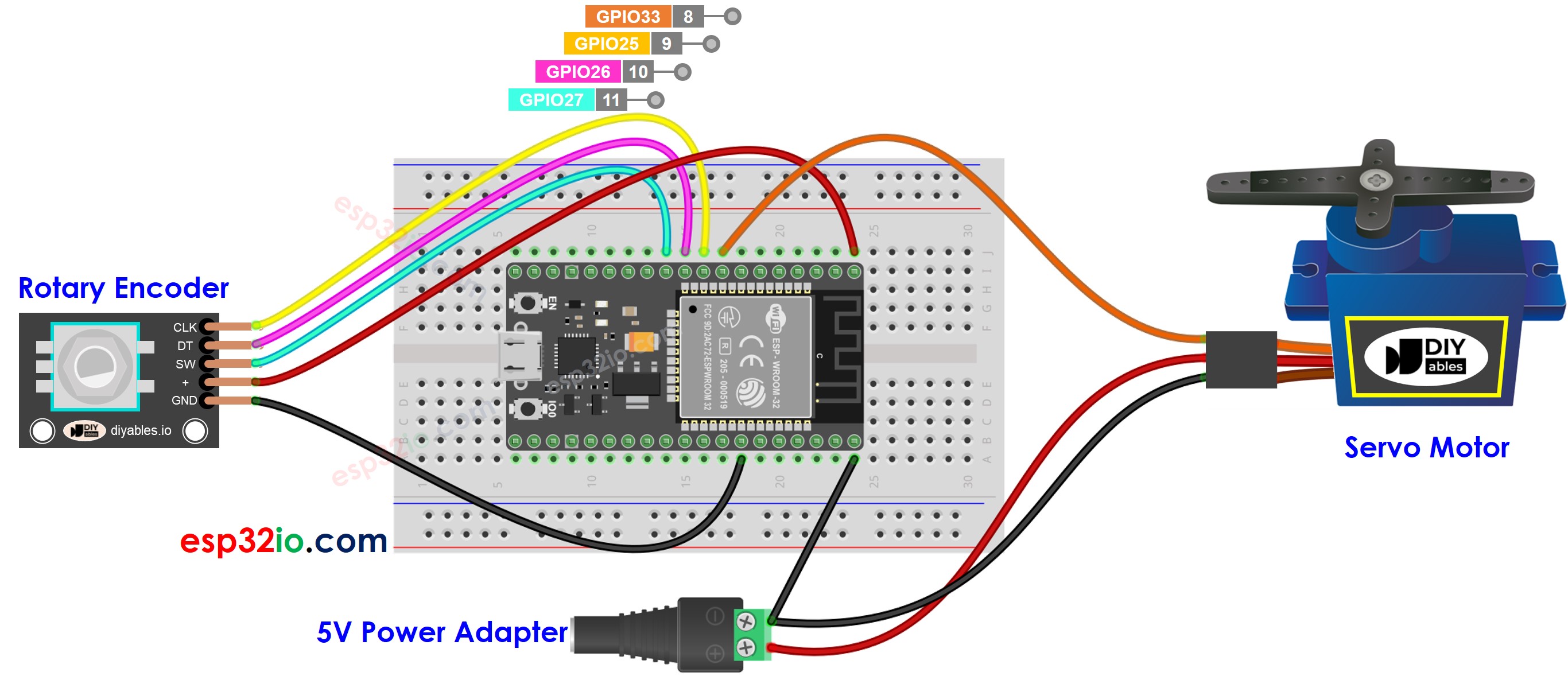
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
Wenn Sie nicht wissen, wie Sie ESP32 und andere Komponenten mit Strom versorgen, finden Sie Anleitungen im folgenden Tutorial: Wie man ESP32 mit Strom versorgt.
ESP32-Code
Schnelle Schritte
- Wenn dies das erste Mal ist, dass Sie ESP32 verwenden, sehen Sie sich wie man die ESP32-Umgebung in der Arduino IDE einrichtet an.
- Schließen Sie die Verkabelung wie im obigen Bild an.
- Schließen Sie das ESP32-Board über ein Micro-USB-Kabel an Ihren PC an.
- Öffnen Sie die Arduino IDE auf Ihrem PC.
- Wählen Sie das richtige ESP32-Board (z. B. ESP32 Dev Module) und den COM-Port aus.
- Verbinden Sie den ESP32 über ein USB-Kabel mit dem PC.
- Öffnen Sie die Arduino IDE, wählen Sie das richtige Board und den richtigen Port.
- Kopieren Sie den obigen Code und öffnen Sie ihn mit der Arduino IDE.
- Klicken Sie in der Arduino IDE auf die Upload-Schaltfläche, um den Code auf den ESP32 hochzuladen.

- Den seriellen Monitor öffnen
- Den Drehencoder drehen
- Die Rotation des Servomotors sehen
- Das Ergebnis im seriellen Monitor sehen
Code-Erklärung
Lies die zeilenweise Erklärung in den Kommentarzeilen des Quellcodes!
Video Tutorial
Wir erwägen die Erstellung von Video-Tutorials. Wenn Sie Video-Tutorials für wichtig halten, abonnieren Sie bitte unseren YouTube-Kanal , um uns zu motivieren, die Videos zu erstellen.