ESP8266 - Feedback-Aktor
In einem früheren Tutorial haben wir den Linearantrieb ohne Rückmeldung besprochen. Dieses Tutorialführt Sie in den Linearantrieb mit Rückmeldung ein (auch bekannt als Linearantrieb mit Rückmeldung). Dieser Linearantriebstyp liefert Informationen, um die Position seines Hubes zu bestimmen und ihn zu steuern. Konkret werden wir lernen:
- Die Funktionsweise eines Linearantriebs mit Feedback
- Wie man die Position des Linearantriebs mit Feedback bestimmt (in Millimetern)
- Wie man die Position eines Linearantriebs steuert
Erforderliche Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Über den Linearantrieb mit Rückmeldung
Ein Linearantrieb mit Rückmeldung ist ein Antrieb, der ein Signal besitzt, um seine Position zu erkennen und zu steuern. Ein Potentiometer wird verwendet, um den Spannungswert in Abhängigkeit von der Hubposition als Rückmeldung zu erzeugen.
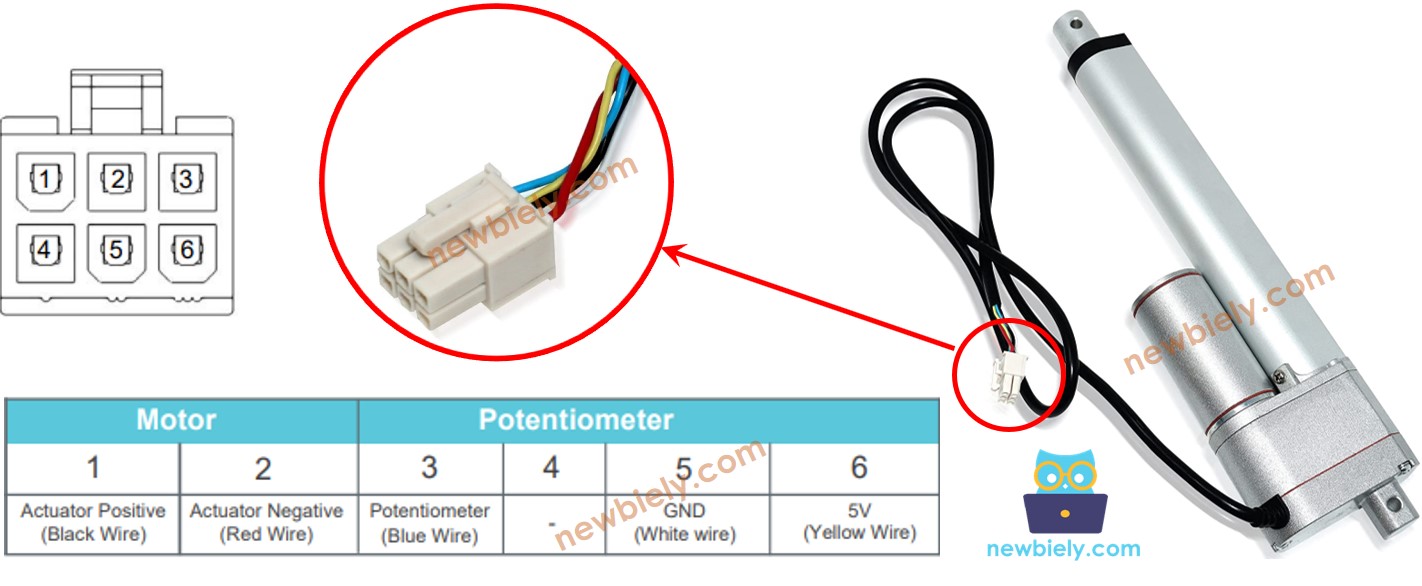
Pinbelegung eines Feedback-Linearantriebs
Ein Linearantrieb mit Feedback hat 5 Drähte:
- Linearantriebs-Plusdraht: Dieser Draht wird verwendet, um den Linearantrieb durch Anlegen einer Hochspannung (12 V, 24 V, 48 V...) zu steuern.
- Linearantriebs-Minusdraht: Dieser Draht wird verwendet, um den Linearantrieb durch Anlegen einer Hochspannung (12 V, 24 V, 48 V...) zu steuern.
- 5-V-Draht: Dieser Draht wird für das Feedback-Potentiometer verwendet. Er sollte an 5 V oder 3,3 V angeschlossen werden.
- GND-Draht: Dieser Draht wird für das Feedback-Potentiometer verwendet. Er sollte an GND angeschlossen werden.
- Potentiometerdraht: (auch als Feedbackdraht oder Ausgangsdraht bezeichnet) Dieser Draht gibt die Spannung entsprechend der Hubposition aus.
Wie es funktioniert
Wenn wir Hochspannung an die positiven und negativen Leitungen anlegen, wird der Hub des Aktuators ausgefahren oder eingefahren. Genauer gesagt:
- Wenn 12 V (12 V, 24 V, 48 V …) an den Plusdraht angeschlossen ist und GND an den Minusdraht, fährt der Linearantrieb mit voller Geschwindigkeit aus, bis er die Endlage erreicht.
- Wenn 12 V (12 V, 24 V, 48 V …) an den Minusdraht angeschlossen ist und GND an den Plusdraht, fährt der Linearantrieb mit voller Geschwindigkeit ein, bis er die Endlage erreicht.
- Wenn dem Linearantrieb die Stromversorgung unterbrochen wird (GND an beiden Leitungen, sowohl dem positiven als auch dem negativen), hört der Linearantrieb auf, auszufahren bzw. einzufahren.
※ Notiz:
- Die zur Betätigung des Stellantriebs erforderliche Spannung wird durch seine Spezifikationen festgelegt. Um die genaue Spannung herauszufinden, konsultieren Sie das Datenblatt oder das Handbuch.
- Auch wenn die Stromversorgung ausgeschaltet ist, kann der Stellantrieb seine Position beibehalten, während er eine Last trägt.
Die Spannung im Draht des Potentiometers hängt direkt von der Hubposition des Stellantriebs ab. Durch Messung dieser Spannung können wir die Hubposition bestimmen.
Schaltplan
Nehmen Sie alle drei Jumper vom L298N-Modul heraus, bevor Sie die Kabel anschließen.
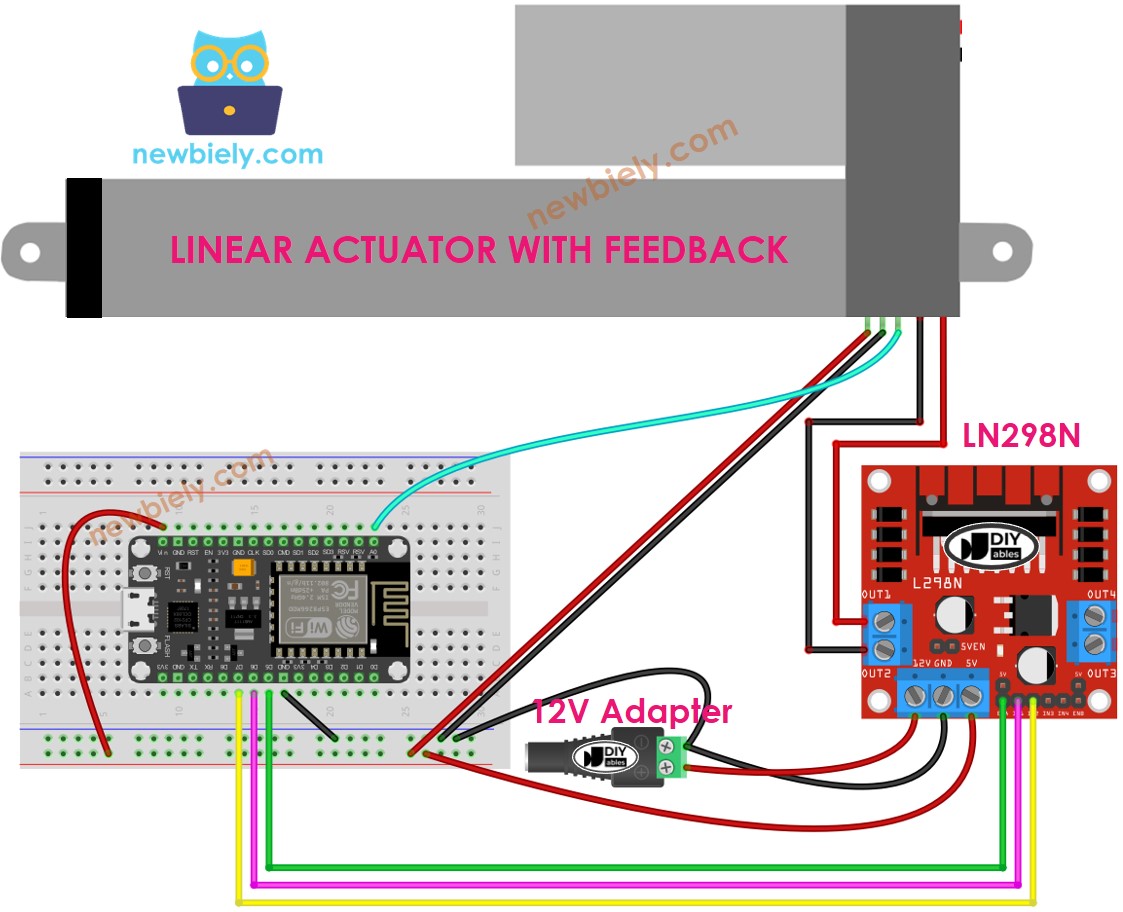
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
Weitere Informationen finden Sie unter ESP8266-Pinbelegung und wie man ESP8266 und andere Komponenten mit Strom versorgt.
Wie man einen Linearantrieb ausfährt und einfährt
Schau dir das ESP8266 - Actuator Tutorial an.
Wie man die Position des Linearantriebs findet
Dies ist eine Abbildung davon, wie man den Hub eines Linearaktuators bestimmt.
Kalibrierung
- Bestimmen Sie die Länge des Hubwegs des Aktuators (in Millimetern), indem Sie entweder mit einem Lineal messen oder im Datenblatt nachsehen.
- Um die Ausgabewerte zu ermitteln, wenn der lineare Aktuator vollständig ausgefahren bzw. vollständig eingefahren ist, führen Sie den untenstehenden Code aus.
- Sie werden das Protokoll im seriellen Monitor beobachten, wie im untenstehenden Beispiel gezeigt.
Notiere die drei Werte im untenstehenden Code. Falls die Minimal- und Maximawerte vertauscht sind, tausche die IN1_PIN und IN2_PIN.
Notieren Sie sich die drei Werte im untenstehenden Code. Wenn die Minimal- und Maximalwerte vertauscht sind, vertauschen Sie IN1_PIN und IN2_PIN.
ESP8266-Code, der die Position des Stellglieds berechnet
- Aktualisiere den Code mit den drei kalibrierten Werten.
- Lade den Code auf ESP8266 hoch.
- Schau dir das Ergebnis im seriellen Monitor an.
Wie man einen Linearantrieb auf eine bestimmte Position steuert
Video Tutorial
Wir erwägen die Erstellung von Video-Tutorials. Wenn Sie Video-Tutorials für wichtig halten, abonnieren Sie bitte unseren YouTube-Kanal , um uns zu motivieren, die Videos zu erstellen.