ESP8266 - RFID - Servomotor
Dieses Tutorial zeigt dir, wie man einen ESP8266 und ein RC522-Modul (RFID/NFC) verwendet, um einen Servo-Motor zu steuern. Der Prozess funktioniert wie folgt:
- Wenn ein autorisierter Tag berührt wird, dreht der ESP8266 den Servomotor auf 90°
- Wenn derselbe Tag erneut berührt wird, dreht sich der Servomotor wieder auf 0°
- Dieser Zyklus wiederholt sich endlos
Dies kann verwendet werden, um einen Schrank, eine Schublade oder eine Tür zu sichern oder das Öffnen und Schließen des Futterautomaten zu steuern.
Erforderliche Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Kaufhinweis: Falls Sie mehrere Servomotoren verwenden möchten, empfehlen wir die Verwendung des PCA9685 16 Channel PWM Servo Driver Module, um MCU-Pins zu sparen und die Verdrahtung zu vereinfachen.
Über RFID/NFC RC522-Modul und Servomotor
Wenn Sie mit dem RFID/NFC RC522-Modul und dem Servomotor (einschließlich Pinbelegung, Funktionsweise und Programmierung) nicht vertraut sind, werfen Sie einen Blick auf die folgenden Tutorials:
- ESP8266 - RFID/NFC RC522 tutorial
- ESP8266 - Servo Motor tutorial

Wie es funktioniert
- Einige UIDs von RFID/NFC-Tags sind bereits in den ESP8266-Code programmiert.
- Wenn ein Benutzer ein RFID/NFC-Tag an den RFID/NFC-Leser hält, liest der Leser die UID vom Tag aus.
- Der ESP8266 empfängt dann die UID vom Leser.
- Er vergleicht die gelesene UID mit den vordefinierten UIDs, die im Code festgelegt wurden.
- Wenn die UID mit einer der vordefinierten UIDs übereinstimmt, wird der ESP8266 den Servomotor auf 90° steuern.
- Wenn der Tag erneut berührt wird, steuert der ESP8266 den Servomotor wieder auf 0°.
- Dieser Vorgang wird unendlich oft wiederholt.
Verdrahtungsdiagramm
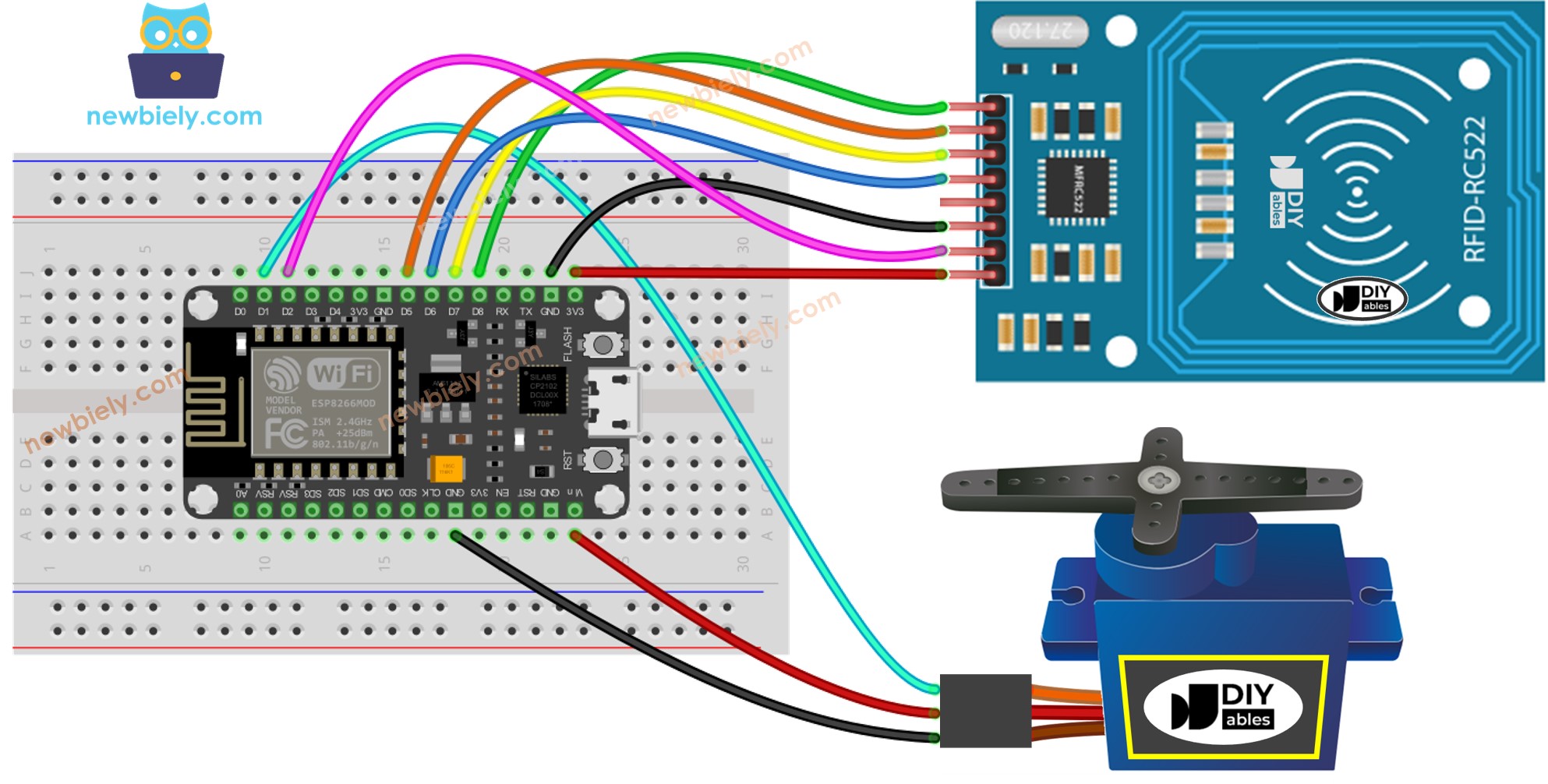
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
Weitere Informationen finden Sie unter ESP8266-Pinbelegung und wie man ESP8266 und andere Komponenten mit Strom versorgt.
Aus Gründen der Einfachheit wird das oben gezeigte Verdrahtungsdiagramm zu Test- oder Lernzwecken sowie für einen Servomotor mit kleinem Drehmoment verwendet. Tatsächlich empfehlen wir dringend die Verwendung einer externen Stromversorgung für den Servomotor. Das unten gezeigte Verdrahtungsdiagramm zeigt, wie der Servomotor an eine externe Stromquelle angeschlossen wird.
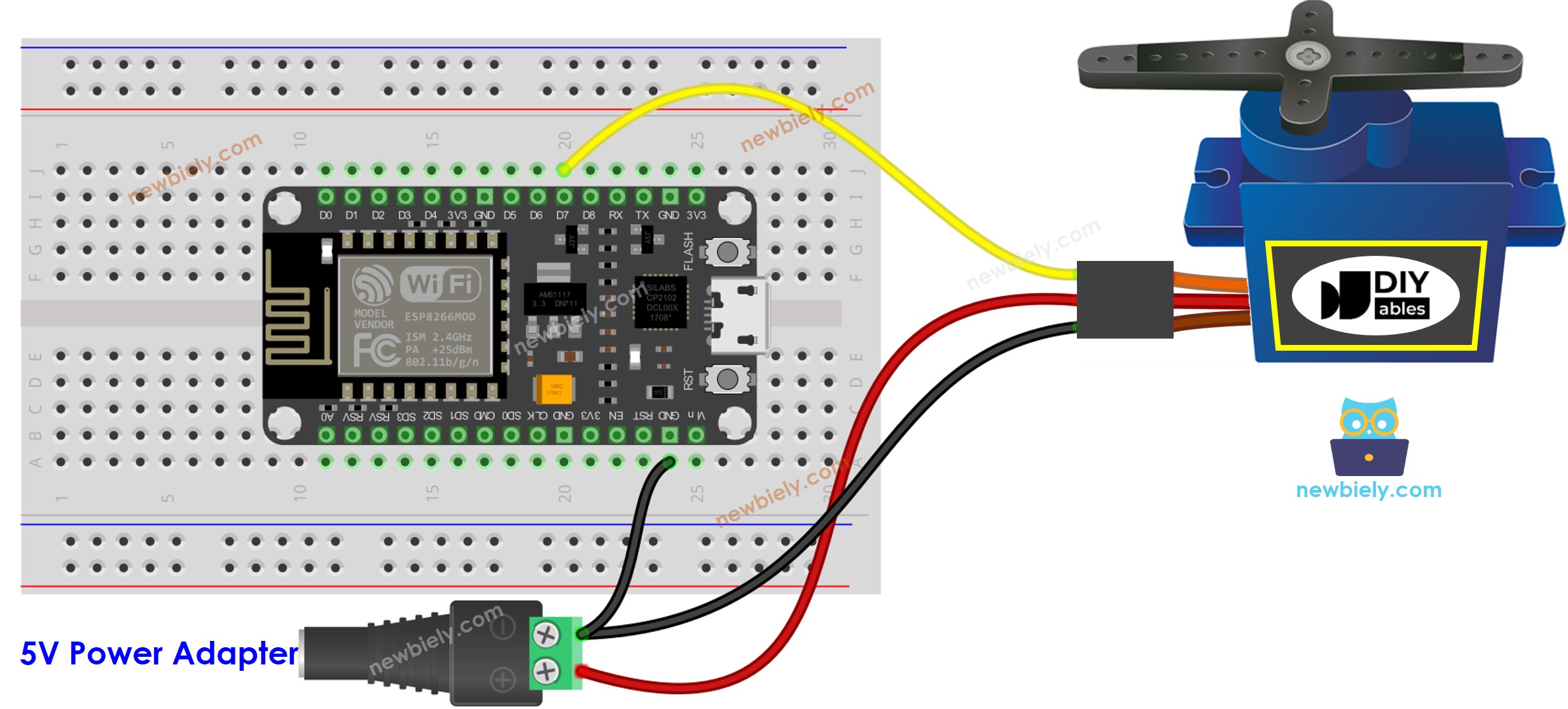
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
※ Notiz:
Die Anordnung der Pins kann je nach Hersteller variieren. VERWENDEN SIE IMMER die auf dem Modul aufgedruckten Beschriftungen. Das obige Bild zeigt die Pinbelegung der Module des Herstellers DIYables.
Verdrahtungstabelle des RFID-/NFC-RC522-Moduls
| RFID/NFC RC522 | ESP8266 |
|---|---|
| SS | → GPIO 5 (SPI CS/SS) |
| SCK | → GPIO 8 (SPI CLK) |
| MOSI | → GPIO 7 (SPI MOSI) |
| MISO | → GPIO 6 (SPI MISO) |
| IRQ(not connected) | |
| GND | → GND |
| RST | → TO_BE_UPDATED |
| VCC | → 3.3V |
ESP8266-Code - einzelner RFID/NFC-Tag
Schnelle Schritte
Um mit dem ESP8266 in der Arduino-IDE zu beginnen, befolgen Sie diese Schritte:
- Schauen Sie sich das Tutorial zur Einrichtung der ESP8266-Umgebung in der Arduino IDE an, falls dies Ihre erste Verwendung des ESP8266 ist.
- Verdrahten Sie die Bauteile gemäß dem Diagramm.
- Schließen Sie das ESP8266-Board über ein USB-Kabel an Ihren Computer an.
- Öffnen Sie die Arduino IDE auf Ihrem Computer.
- Wählen Sie das richtige ESP8266-Board aus, z. B. NodeMCU 1.0 (ESP-12E-Modul), und seinen jeweiligen COM-Port.
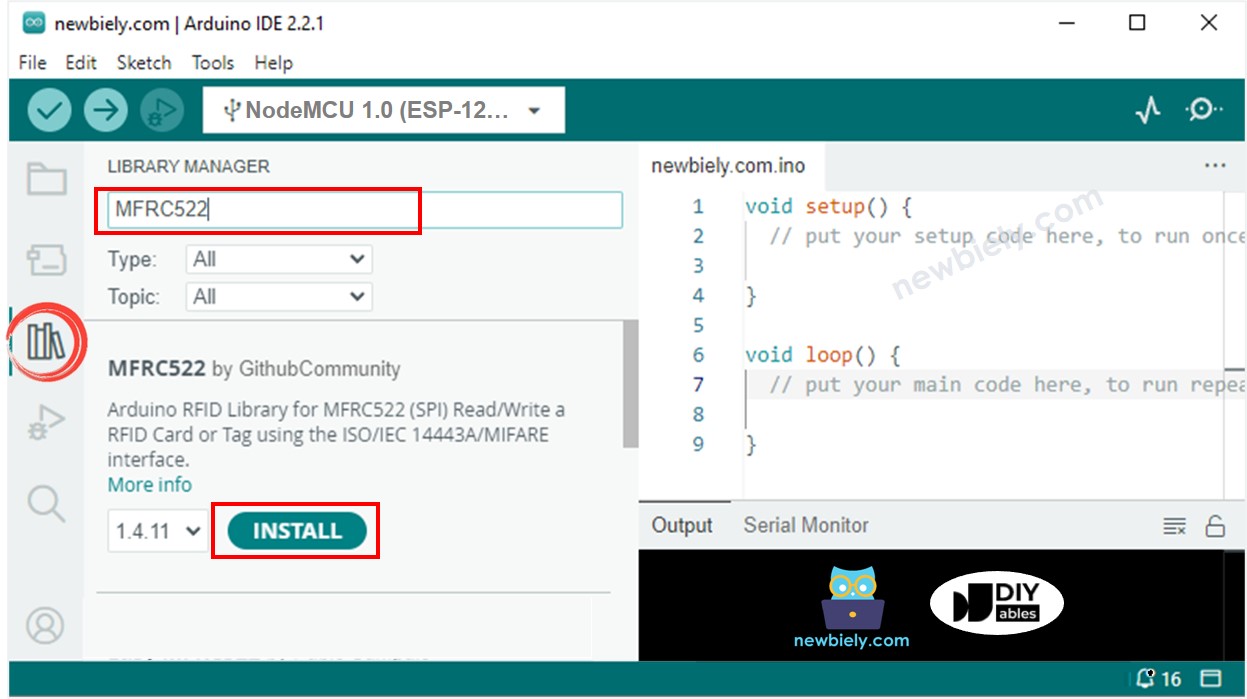
- Klicken Sie auf das Bibliotheken-Symbol in der linken Leiste der Arduino IDE.
- Suchen Sie nach „MFRC522“ und finden Sie die Bibliothek von GithubCommunity.
- Drücken Sie die Installieren-Schaltfläche, um die MFRC522-Bibliothek zu installieren.
Um die UID eines RFID-/NFC-Tags zu finden, besteht der erste Schritt darin, Code auf den ESP8266 mit der Arduino-IDE hochzuladen und anschließend auf die Hochladen-Schaltfläche zu klicken. Danach öffnen Sie den Serial Monitor und legen Sie den Tag auf das RFID-RC522-Modul. Die UID wird im Serial Monitor angezeigt.
Sobald Sie Ihre UID haben:
- Ersetzen Sie die UID in Zeile 20 des Codes durch Ihre eigene. Zum Beispiel ändern Sie byte authorizedUID[4] = {0xFF, 0xFF, 0xFF, 0xFF}; zu byte authorizedUID[4] = {0x3A, 0xC9, 0x6A, 0xCB};
- Laden Sie den Code auf Ihr ESP8266-Board hoch
- Halten Sie einen RFID/NFC-Tag an das RFID-RC522-Modul
- Der Servomotor sollte sich auf 90° drehen
- Überprüfen Sie die Ausgabe im Serial Monitor
- Tippen Sie erneut auf den RFID/NFC-Tag am RFID-RC522-Modul.
- Der Servomotor dreht sich auf 0°. Sie können dies im seriellen Monitor beobachten.
- Tippe einen RFID/NFC-Tag auf das RFID-RC522-Modul.
- Prüfe den seriellen Monitor auf die Ausgabe.
Video Tutorial
Wir erwägen die Erstellung von Video-Tutorials. Wenn Sie Video-Tutorials für wichtig halten, abonnieren Sie bitte unseren YouTube-Kanal , um uns zu motivieren, die Videos zu erstellen.