Arduino - Aktuator mit Rückkopplung
In einem früheren Tutorial haben wir über den Linearantrieb ohne Rückkopplung gelernt. In diesem Tutorial lernen wir den Linearantrieb mit Rückkopplung kennen (auch als Linearantrieb mit Rückkopplung bezeichnet). Die Rückmeldung des Linearantriebs liefert die Information, die Position seines Hubwegs zu bestimmen und anschließend zu steuern. Im Detail werden wir lernen:
- Wie ein Linearantrieb mit Rückkopplung funktioniert
- Wie man die Position des Linearantriebs mit Rückkopplung bestimmt (in Millimetern)
- Wie man die Position eines Linearantriebs steuert
Erforderliche Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables STEM V3 Starter-Kit (Arduino enthalten) | |
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Über Linearantrieb mit Rückkopplung
Ein Linearantrieb mit Rückkopplung ist ein Linearaktuator, der über ein Rückkopplungssignal verfügt, das es ermöglicht, seine Position zu identifizieren und ihn zu steuern. Das Rückkopplungssignal ist ein Potentiometer, das den Spannungswert proportional zur Hubposition ausgibt.
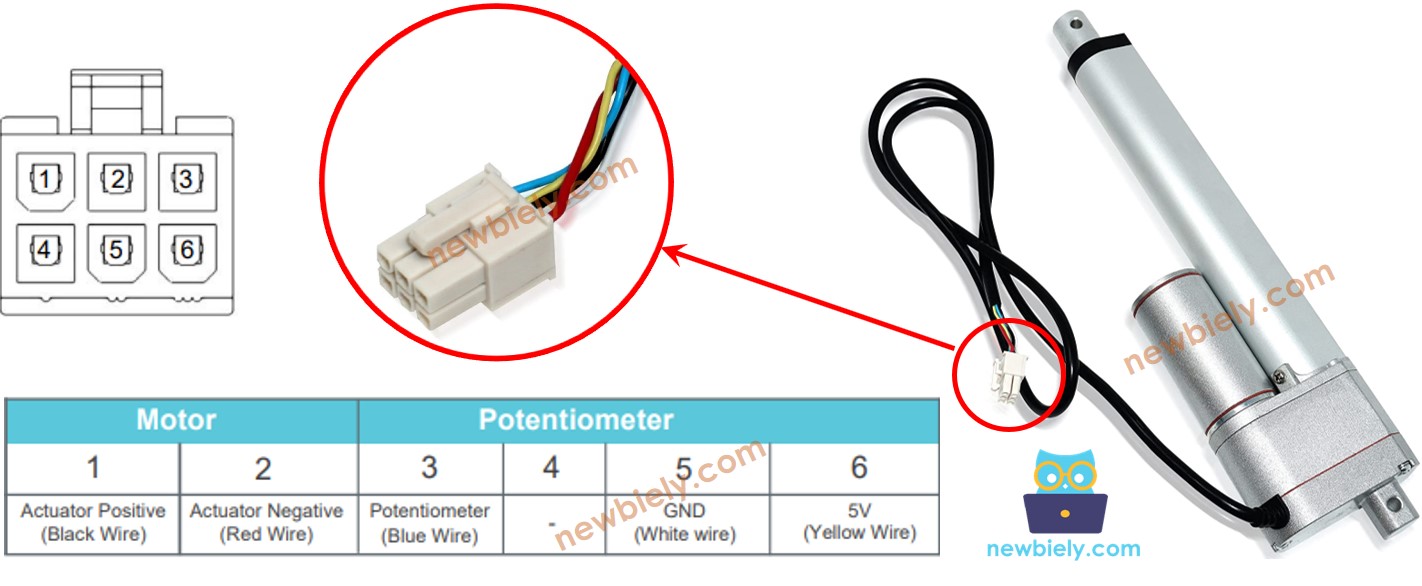
Pinbelegung des Feedback-Linearantriebs
Ein Linearantrieb mit Rückmeldung hat 5 Drähte:
- Positivdraht des Aktuators: Dieser Draht wird verwendet, um den linearen Aktuator mittels Hochspannung (12 V, 24 V, 48 V ...) zu steuern.
- Positivdraht des Aktuators: Dieser Draht wird verwendet, um den linearen Aktuator mittels Hochspannung (12 V, 24 V, 48 V ...) zu steuern.
- 5V-Draht: Dieser Draht wird für das Feedback-Potentiometer verwendet. Verbinden Sie diesen Draht mit 5 V oder 3,3 V.
- GND-Draht: Dieser Draht wird für das Feedback-Potentiometer verwendet. Verbinden Sie diesen Draht mit GND.
- Potentiometerdraht: (auch als Feedbackdraht oder Ausgangsdraht bezeichnet) Dieser Draht gibt den Spannungswert proportional zur Hubposition aus.
Wie es funktioniert
Wenn wir Hochspannung an die Plus- und Minusleitungen anlegen, wird der Hub des Aktuators ausgefahren oder eingefahren. Im Detail: Wenn wir verbinden:
- 12V (12V, 24V, 48V...) und GND an den positiven Draht bzw. den negativen Draht anschließen: Der Linearantrieb fährt mit voller Geschwindigkeit aus, bis er den Endanschlag erreicht.
- 12V (12V, 24V, 48V...) und GND an den negativen Draht bzw. den positiven Draht anschließen: Der Linearantrieb fährt mit voller Geschwindigkeit ein, bis er den Endanschlag erreicht.
- Während des Ausfahrens oder Einfahrens wird die Stromzufuhr zum Linearantrieb unterbrochen (GND an beide Drähte, sowohl an den positiven als auch an den negativen Draht). Der Linearantrieb stoppt das Ausfahren bzw. Einfahren.
※ Notiz:
- Der Spannungswert zur Steuerung des Aktuators hängt von der Spezifikation des Aktuators ab. Lesen Sie das Datenblatt oder das Handbuch, um den entsprechenden Spannungswert zu erfahren.
- Der Aktuator kann die Position auch halten, wenn die Stromzufuhr gestoppt wird, während er eine Last trägt.
Der Spannungswert im Potentiometerdraht ist proportional zur Hubposition des Aktuators. Durch die Messung dieser Spannung können wir die Hubposition bestimmen.
Schaltplan
Bitte entfernen Sie alle drei Jumper-Stecker auf dem L298N-Modul, bevor Sie es verdrahten.
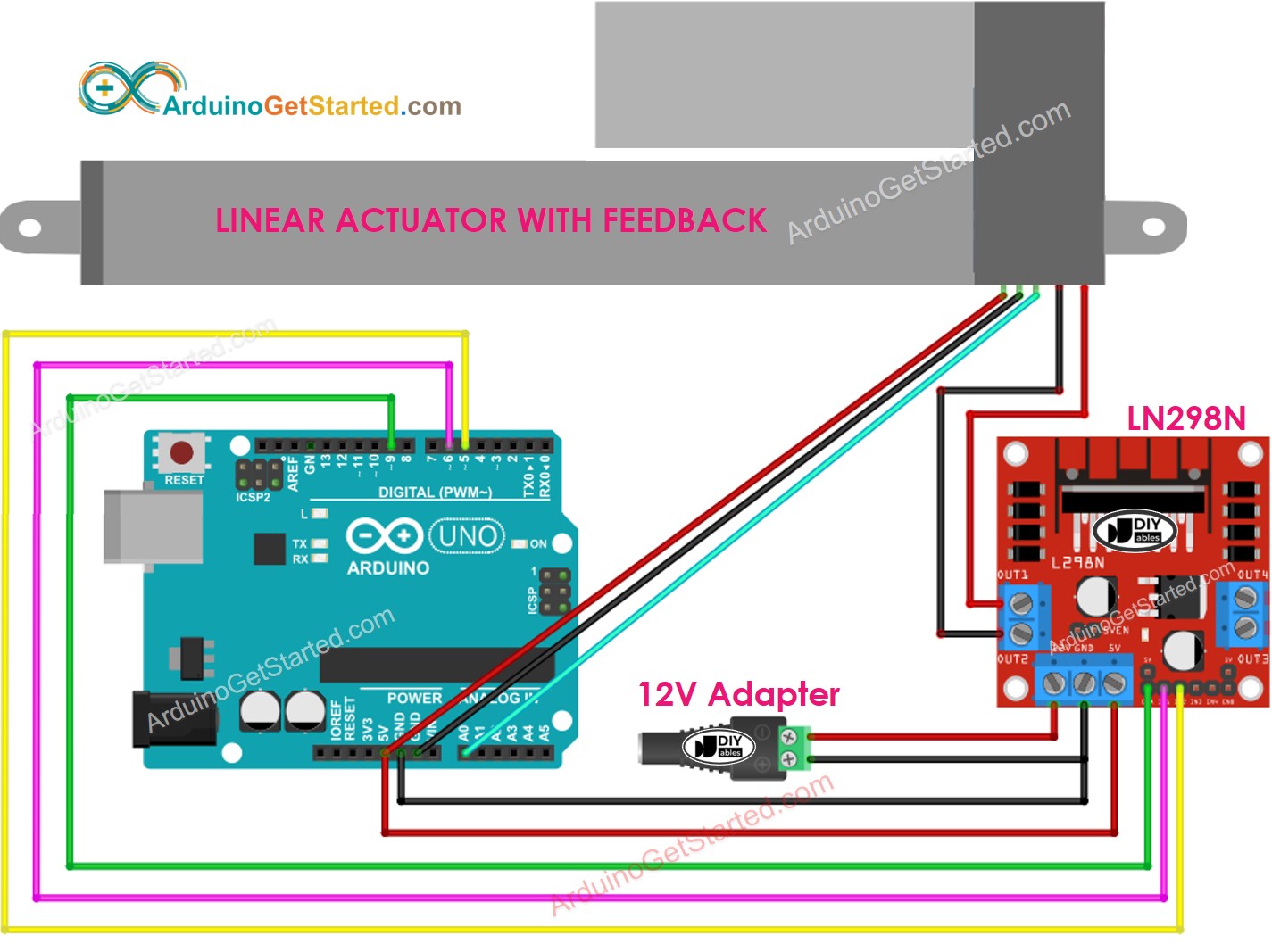
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
Wie man einen Linearantrieb ausfährt und einzieht
Siehe Arduino - Aktuator Tutorial
Wie man die Position des Linearantriebs findet
Nachstehend wird gezeigt, wie die Hubposition eines linearen Aktuators bestimmt wird.
Kalibrierung
- Bestimmen Sie den Hub des Aktuators (in Millimetern) durch Messen (mit einem Lineal) oder durch Lesen des Datenblatts
- Bestimmen Sie die Ausgabewerte, wenn der lineare Aktuator vollständig ausgefahren bzw. vollständig eingefahren ist, indem Sie den untenstehenden Code ausführen
- Sie werden das Protokoll im Serial Monitor wie im untenstehenden Beispiel sehen
- Schreibe diese Werte auf
- Wenn die Min- und Max-Werte vertauscht sind, vertausche IN1_PIN und IN2_PIN
Arduino-Code, der die Position des Aktuators berechnet
- Aktualisiere die drei kalibrierten Werte im Code
- Lade den Code auf den Arduino hoch
- Sieh dir das Ergebnis im Serial Monitor an
Wie man einen Linearantrieb auf eine bestimmte Position steuert
Video Tutorial
Wir erwägen die Erstellung von Video-Tutorials. Wenn Sie Video-Tutorials für wichtig halten, abonnieren Sie bitte unseren YouTube-Kanal , um uns zu motivieren, die Videos zu erstellen.