Arduino - Bewegungssensor - Servomotor
Wir werden lernen:
- Wenn eine Bewegung erkannt wird, drehe den Servomotor auf 90 Grad
- Wenn keine Bewegung erkannt wird, drehe den Servomotor wieder auf 0 Grad
Erforderliche Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables STEM V3 Starter-Kit (Arduino enthalten) | |
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Offenlegung: Einige der in diesem Abschnitt bereitgestellten Links sind Amazon-Affiliate-Links. Wir können eine Provision für Käufe erhalten, die über diese Links getätigt werden, ohne zusätzliche Kosten für Sie. Wir schätzen Ihre Unterstützung.
Kaufhinweis: Falls Sie mehrere Servomotoren verwenden möchten, empfehlen wir die Verwendung des PCA9685 16 Channel PWM Servo Driver Module, um MCU-Pins zu sparen und die Verdrahtung zu vereinfachen.
Über Servomotor und Bewegungssensor
Wenn Sie nichts über Servomotoren und Bewegungssensoren (Pinbelegung, wie sie funktionieren, wie man sie programmiert ...) wissen, informieren Sie sich in den folgenden Tutorials darüber:
Verdrahtungsdiagramm
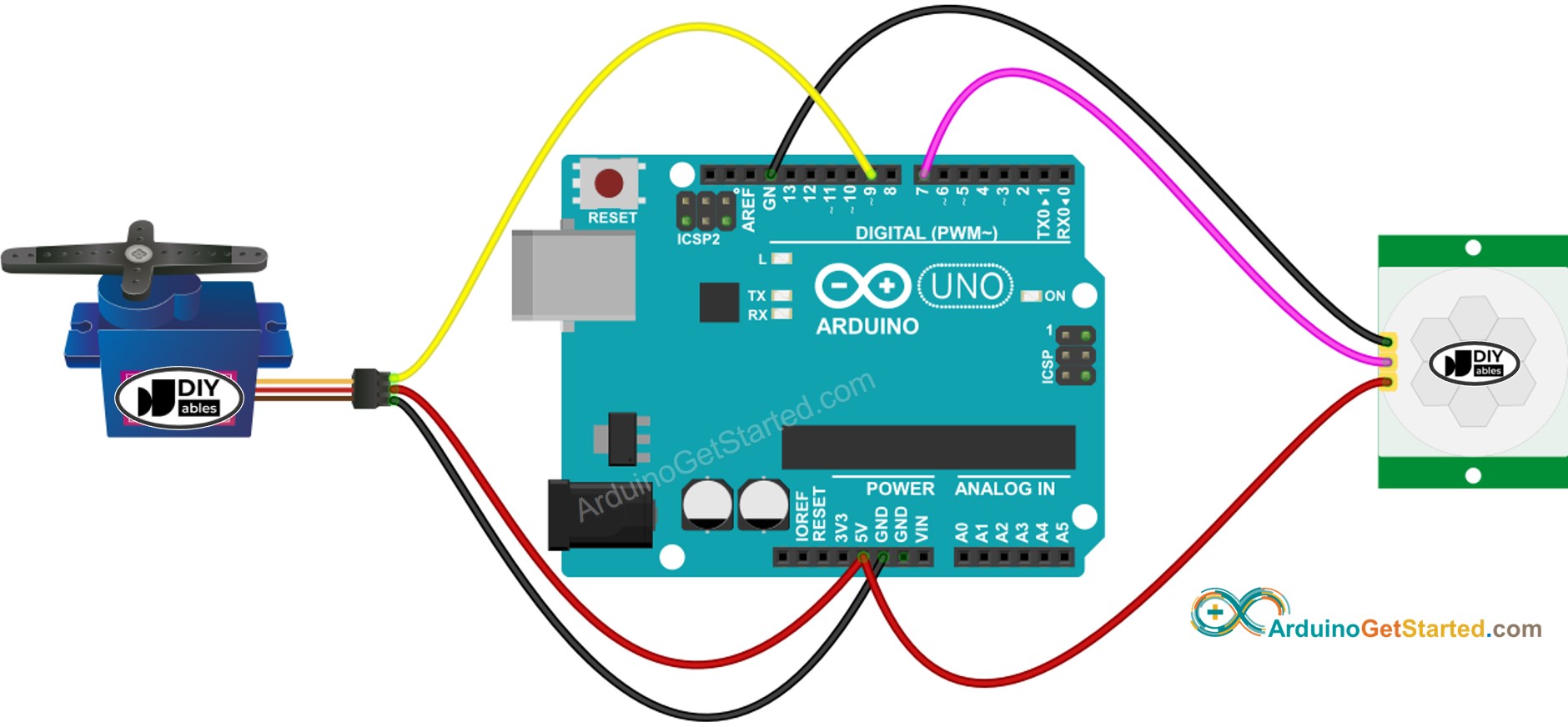
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
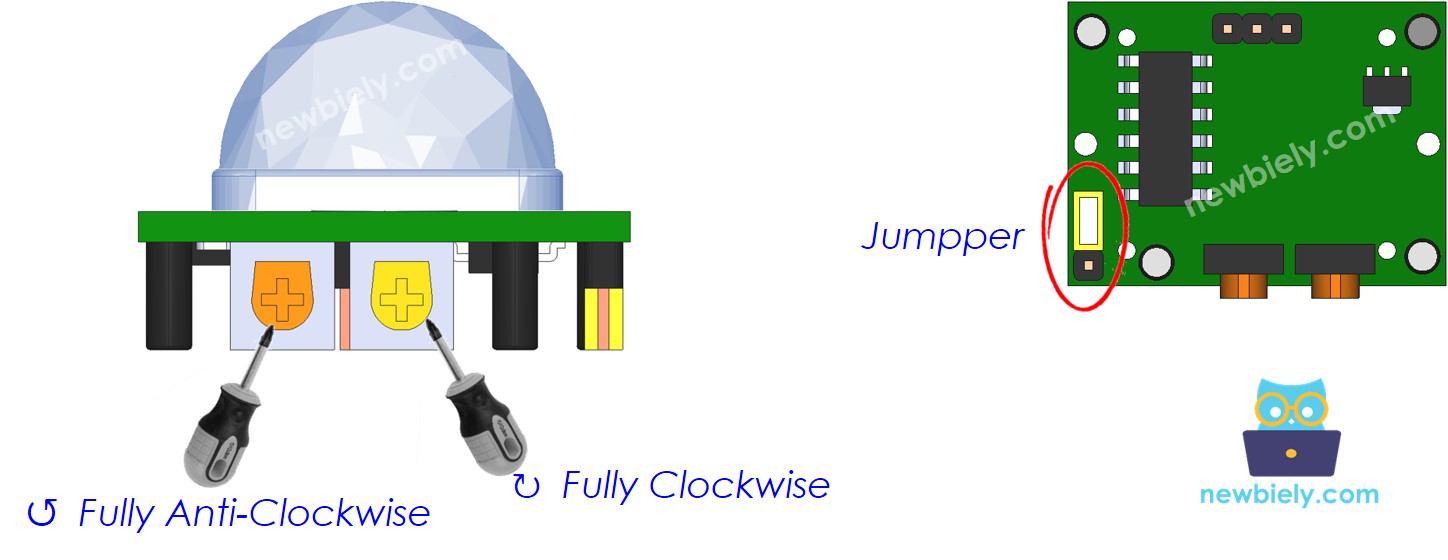
Initialeinstellung
| Time Delay Adjuster | Screw it in anti-clockwise direction fully. |
| Detection Range Adjuster | Screw it in clockwise direction fully. |
| Repeat Trigger Selector | Put jumper as shown on the image. |
Arduino-Code - Bewegungssensor steuert Servomotor
/*
* Dieser Arduino Code wurde von newbiely.de entwickelt
* Dieser Arduino Code wird der Öffentlichkeit ohne jegliche Einschränkung zur Verfügung gestellt.
* Für vollständige Anleitungen und Schaltpläne besuchen Sie bitte:
* https://newbiely.de/tutorials/arduino/arduino-motion-sensor-servo-motor
*/
#include <Servo.h>
// constants won't change
const int MOTION_SENSOR_PIN = 7; // Arduino pin connected to motion sensor's pin
const int SERVO_PIN = 9; // Arduino pin connected to servo motor's pin
Servo servo; // create servo object to control a servo
// variables will change:
int angle = 0; // the current angle of servo motor
int lastMotionState; // the previous state of motion sensor
int currentMotionState; // the current state of motion sensor
void setup() {
Serial.begin(9600); // initialize serial
pinMode(MOTION_SENSOR_PIN, INPUT); // set arduino pin to input mode
servo.attach(SERVO_PIN); // attaches the servo on pin 9 to the servo object
servo.write(angle);
currentMotionState = digitalRead(MOTION_SENSOR_PIN);
}
void loop() {
lastMotionState = currentMotionState; // save the last state
currentMotionState = digitalRead(MOTION_SENSOR_PIN); // read new state
if (currentMotionState == LOW && lastMotionState == HIGH) { // pin state change: LOW -> HIGH
Serial.println("Motion detected!");
servo.write(90);
}
else
if (currentMotionState == HIGH && lastMotionState == LOW) { // pin state change: HIGH -> LOW
Serial.println("Motion stopped!");
servo.write(0);
}
}
Schnelle Schritte
- Schließe Arduino über ein USB-Kabel an den PC an.
- Öffne die Arduino IDE, wähle das richtige Board und den richtigen Port.
- Kopiere den obigen Code und öffne ihn mit der Arduino IDE.
- Klicke in der Arduino IDE auf die Schaltfläche Hochladen, um den Code auf den Arduino hochzuladen.
- Bewege deine Hand vor dem Sensor.
- Sieh dir die Änderung des Servomotors an.
Video Tutorial
Wir erwägen die Erstellung von Video-Tutorials. Wenn Sie Video-Tutorials für wichtig halten, abonnieren Sie bitte unseren YouTube-Kanal , um uns zu motivieren, die Videos zu erstellen.