Arduino - DC-Motor - Endschalter
In diesem Arduino-Tutorial lernen wir, wie man mit dem Arduino einen Gleichstrommotor mithilfe eines Endschalters und des L298N-Treibers steuert. Im Detail werden wir lernen:
- Wie man den Gleichstrommotor stoppt, wenn ein Endschalter betätigt wird
- Wie man die Drehrichtung eines Gleichstrommotors ändert, wenn ein Endschalter betätigt wird
- Wie man die Drehrichtung eines Gleichstrommotors ändert, wenn zwei Endschalter betätigt werden
Erforderliche Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables STEM V3 Starter-Kit (Arduino enthalten) | |
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Über Gleichstrommotor und Grenzschalter
Wenn Sie nichts über Gleichstrommotoren und Endschalter (Pinbelegung, Funktionsweise, wie man sie programmiert ...) wissen, lernen Sie in den folgenden Tutorials mehr darüber:
- Arduino - Limit Switch tutorial
- Arduino - Controls DC Motor tutorial
Verdrahtungsdiagramm
Dieses Tutorial bietet Arduino-Codes für zwei Fälle: Einen Gleichstrommotor + einen Grenzschalter, Einen Gleichstrommotor + zwei Grenzschalter.
- Schaltplan zwischen dem Gleichstrommotor und einem Endschalter
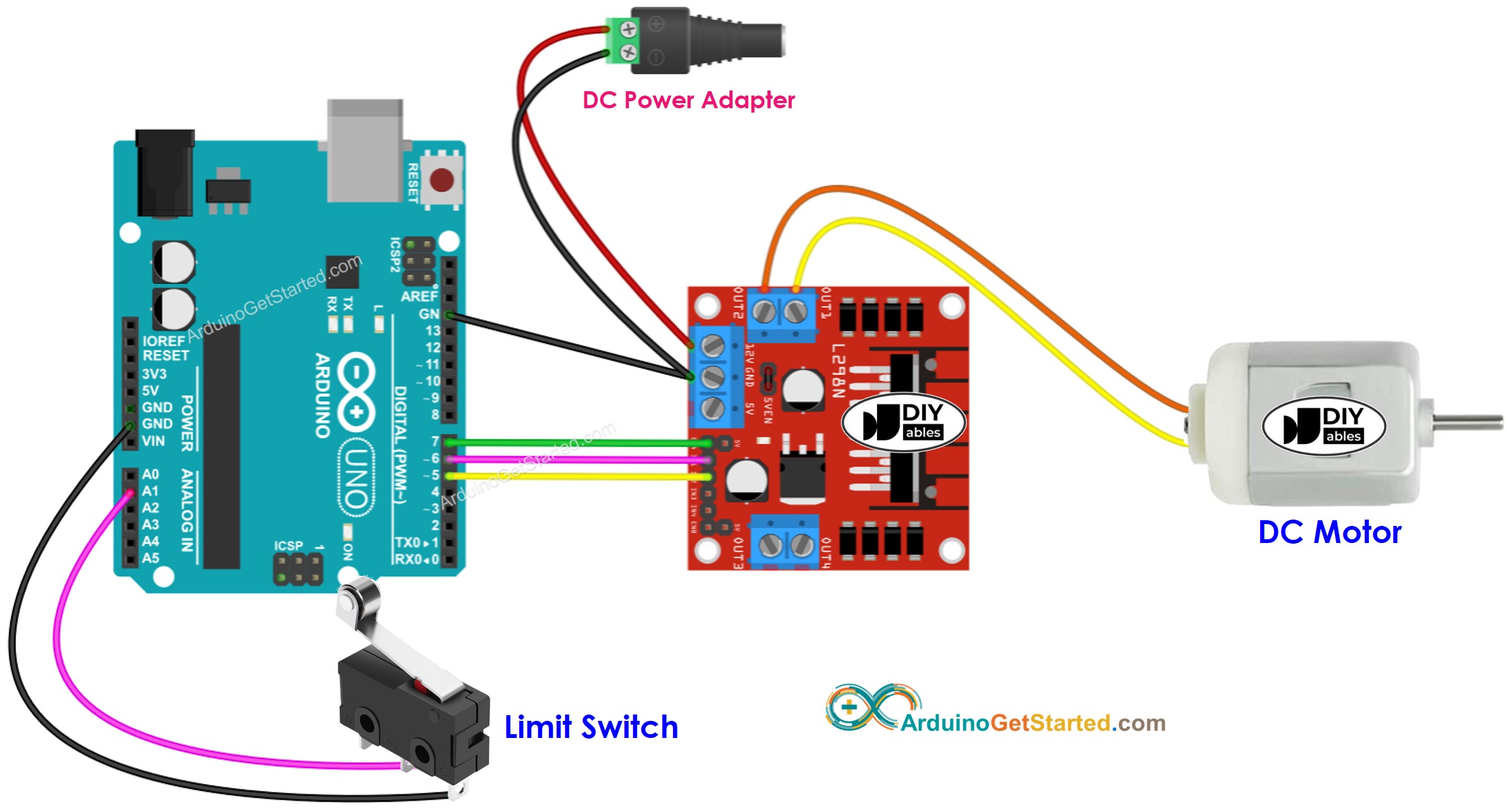
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
- Verdrahtungsdiagramm zwischen dem Gleichstrommotor und zwei Endschaltern
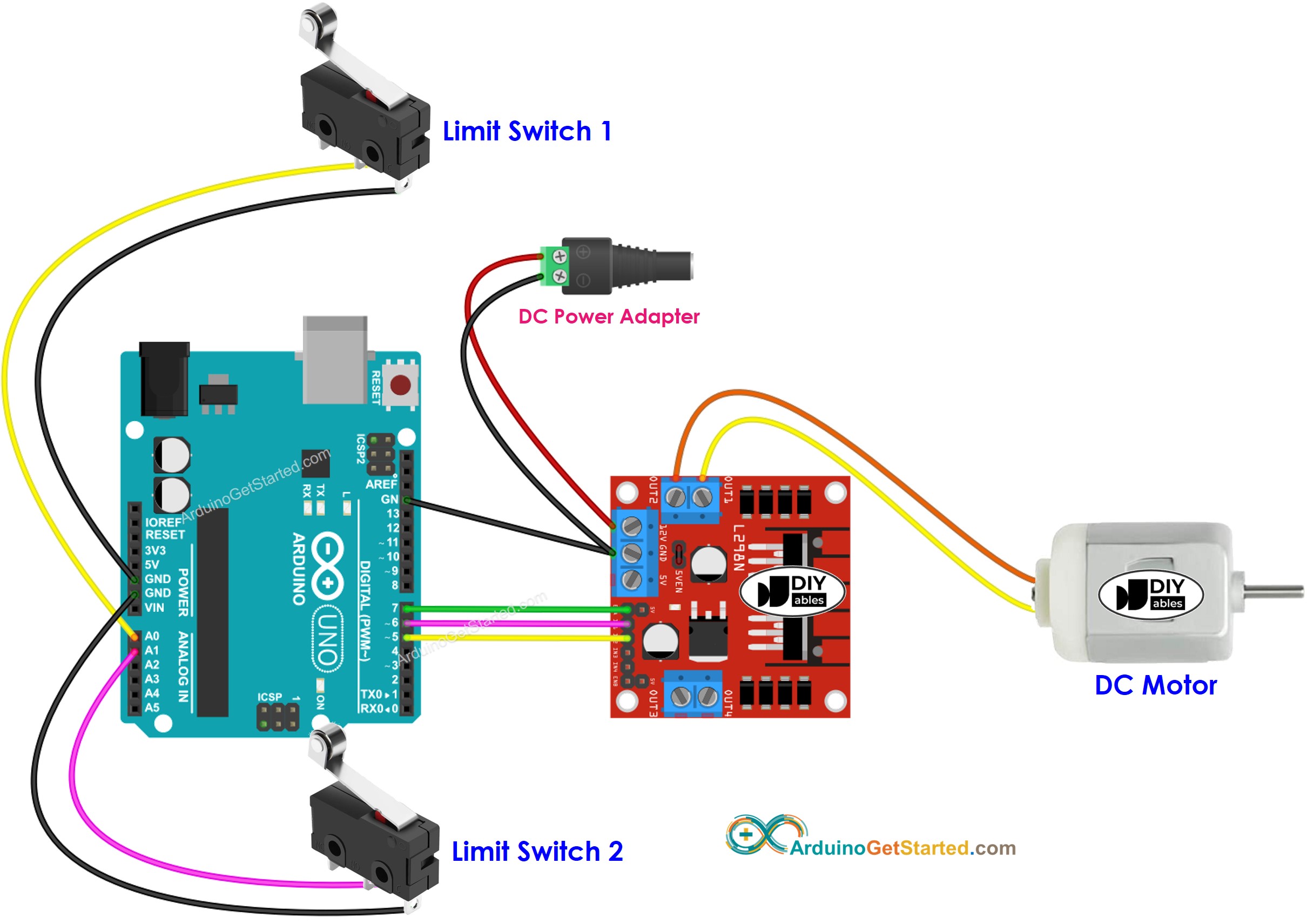
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
Arduino-Code – DC-Motor durch einen Endschalter stoppen
Der untenstehende Code lässt einen Gleichstrommotor endlos drehen und stoppt sofort, wenn ein Endschalter berührt wird.
Schnelle Schritte
- Verbinde Arduino über ein USB-Kabel mit dem PC
- Öffne die Arduino IDE, wähle das richtige Board und den richtigen Port aus
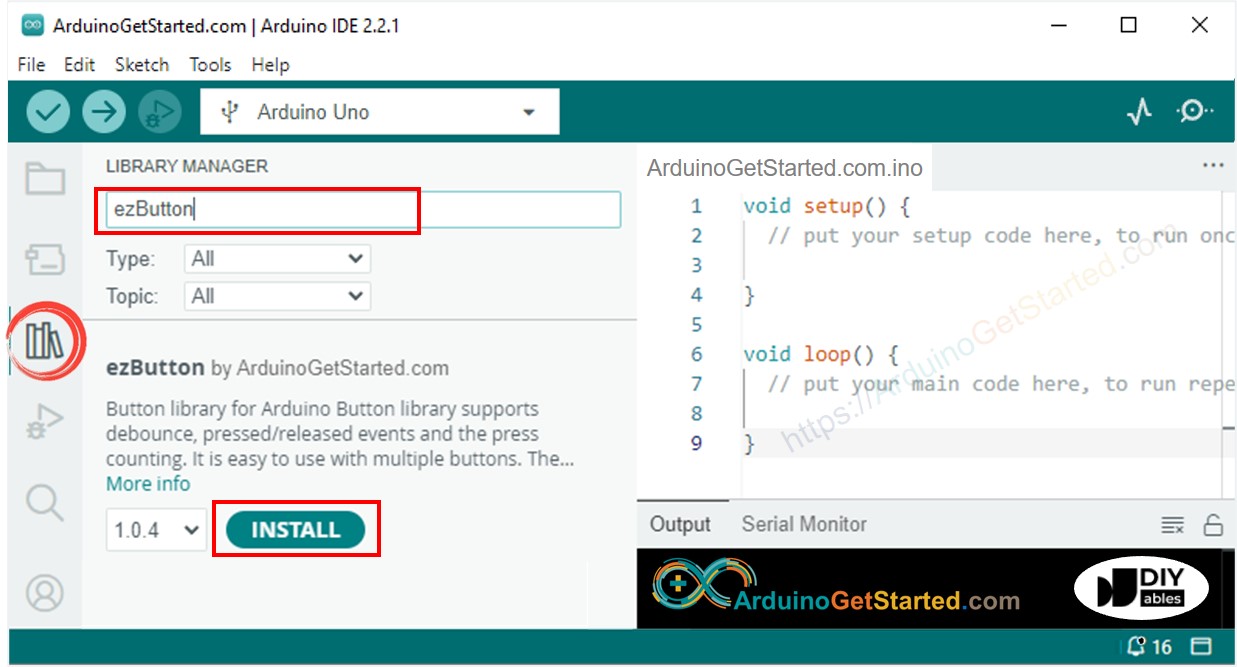
- Gehe zum Bibliotheken-Symbol in der linken Leiste der Arduino IDE.
- Suche nach “ezButton”, dann finde die Button-Bibliothek von ArduinoGetStarted.com
- Klicke auf die Schaltfläche Installieren, um die ezButton-Bibliothek zu installieren.
- Kopieren Sie den obigen Code und öffnen Sie ihn in der Arduino IDE
- Klicken Sie auf die Hochladen-Schaltfläche in der Arduino IDE, um den Code auf den Arduino hochzuladen
- Wenn die Verdrahtung korrekt ist, sehen Sie, dass sich der Motor im Uhrzeigersinn dreht.
- Berühren Sie den Endschalter.
- Sie sehen, dass der Motor sofort gestoppt wird.
- Das Ergebnis im seriellen Monitor sieht wie folgt aus.
Code-Erklärung
Sie können die Erklärung in der Kommentarzeile des obigen Arduino-Codes finden.
Arduino-Code - Die Richtung eines Gleichstrommotors durch einen Endschalter ändern
Der untenstehende Code lässt einen Gleichstrommotor unendlich drehen und seine Drehrichtung ändern, wenn ein Grenzschalter berührt wird.
Schnelle Schritte
- Kopieren Sie den obigen Code und öffnen Sie ihn mit der Arduino-IDE.
- Klicken Sie auf die Schaltfläche Hochladen in der Arduino-IDE, um den Code auf den Arduino hochzuladen.
- Wenn die Verkabelung korrekt ist, sehen Sie, wie sich der Motor im Uhrzeigersinn dreht.
- Berühren Sie den Endschalter.
- Sie sehen, dass sich die Richtung des DC-Motors gegen den Uhrzeigersinn ändert.
- Berühren Sie den Endschalter erneut.
- Sie sehen, dass sich die Richtung des DC-Motors wieder auf den Uhrzeigersinn ändert.
- Das Ergebnis im Seriemonitor sieht unten so aus.
Arduino-Code - Richtungswechsel des Gleichstrommotors durch zwei Grenzschalter
Der unten stehende Code lässt einen Gleichstrommotor endlos drehen und die Richtung ändern, wenn einer von zwei Endschaltern berührt wird.
Schnelle Schritte
- Kopieren Sie den obigen Code und öffnen Sie ihn mit der Arduino-IDE.
- Klicken Sie auf die Schaltfläche Hochladen in der Arduino-IDE, um den Code auf den Arduino hochzuladen.
- Wenn die Verkabelung korrekt ist, sehen Sie, dass sich der Motor im Uhrzeigersinn dreht.
- Berühren Sie den Endschalter 1.
- Sie werden sehen, dass sich die Richtung des DC-Motors gegen den Uhrzeigersinn ändert.
- Berühren Sie den Endschalter 2.
- Sie werden sehen, dass sich die Richtung des DC-Motors auf den Uhrzeigersinn ändert.
- Das Ergebnis im seriellen Monitor sieht wie folgt aus.
Video Tutorial
Wir erwägen die Erstellung von Video-Tutorials. Wenn Sie Video-Tutorials für wichtig halten, abonnieren Sie bitte unseren YouTube-Kanal , um uns zu motivieren, die Videos zu erstellen.