Arduino - Auto
Eines der aufregendsten Projekte für Arduino-Anfänger ist die Erstellung eines Arduino-Roboterautos. In diesem Tutorial werden wir herausfinden, wie man Arduino verwendet, um ein Roboterauto zu bauen und es mit einer IR-Fernbedienung zu steuern. Wir werden außerdem ein weiteres Tutorial untersuchen, in dem wir lernen, es in ein Bluetooth-gesteuertes Auto zu verwandeln.

Erforderliche Hardware
Oder Sie können die folgenden Kits kaufen:
| 1 | × | DIYables STEM V3 Starter-Kit (Arduino enthalten) | |
| 1 | × | DIYables Sensor-Kit (18 Sensoren/Displays) |
Über Roboter-Auto
Im Arduino-Kontext wird das Roboterauto üblicherweise als Roboterauto, RC-Auto, Fernsteuerungsauto, Smart Car oder DIY-Auto bezeichnet. Es kann aus der Ferne und drahtlos gesteuert werden, entweder über eine IR-Fernbedienung oder eine Smartphone-App über Bluetooth/WiFi... Das Roboterauto kann nach links oder rechts abbiegen und vorwärts oder rückwärts fahren.
Ein 2WD (Zweiradantrieb) Auto für Arduino ist ein kleines Roboterfahrzeug, das du mit einem Arduino-Board bauen und steuern kannst. Es besteht typischerweise aus den folgenden Komponenten:
- Fahrgestell: Die Basis bzw. der Rahmen des Autos, an dem alle anderen Komponenten montiert sind.
- Räder: Die beiden Räder, die dem Auto Fortbewegung verleihen. Sie sind an zwei DC-Motoren angeschlossen.
- Motoren: Zwei DC-Motoren werden verwendet, um die beiden Räder anzutreiben.
- Motortreiber: Die Motortreiberplatine ist eine wesentliche Komponente, die zwischen dem Arduino und den Motoren vermittelt. Sie nimmt Signale vom Arduino entgegen und liefert die notwendige Leistung und Steuerung für die Motoren.
- Arduino-Board: Das Gehirn des Autos. Es liest Eingaben von Sensoren und Benutzereingaben aus und steuert die Motoren entsprechend.
- Stromversorgung: Das 2WD-Auto benötigt eine Stromquelle, in der Regel Batterien und einen Batteriehalter, um die Motoren und das Arduino-Board mit Strom zu versorgen.
- Drahtloser Empfänger: Ein Infrarot-, Bluetooth- oder WLAN-Modul für die kabellose Kommunikation mit einer Fernbedienung oder einem Smartphone.
- Optionale Komponenten: Je nach Komplexität deines Projekts kannst du verschiedene optionale Komponenten hinzufügen, wie Sensoren (z. B. Ultraschallsensoren zur Hindernisvermeidung, Linienfolgesensoren) und mehr.
In diesem Tutorial verwenden wir zur Vereinfachung Folgendes:
- 2WD Auto-Kit (einschließlich Fahrgestell, Räder, Motoren, Batteriehalter)
- L298N Motortreiber
- Infrarot-Kit (einschließlich IR-Fernbedienung und IR-Empfänger)
Überprüfen Sie die Hardwareliste oben auf dieser Seite.
So funktioniert es
- Arduino verbindet sich über das L298N-Motortreiber-Modul mit den DC-Motoren des Roboterautos.
- Arduino verbindet sich mit einem IR-Empfänger.
- Die Batterie versorgt Arduino, DC-Motoren, den Motortreiber und den IR-Empfänger.
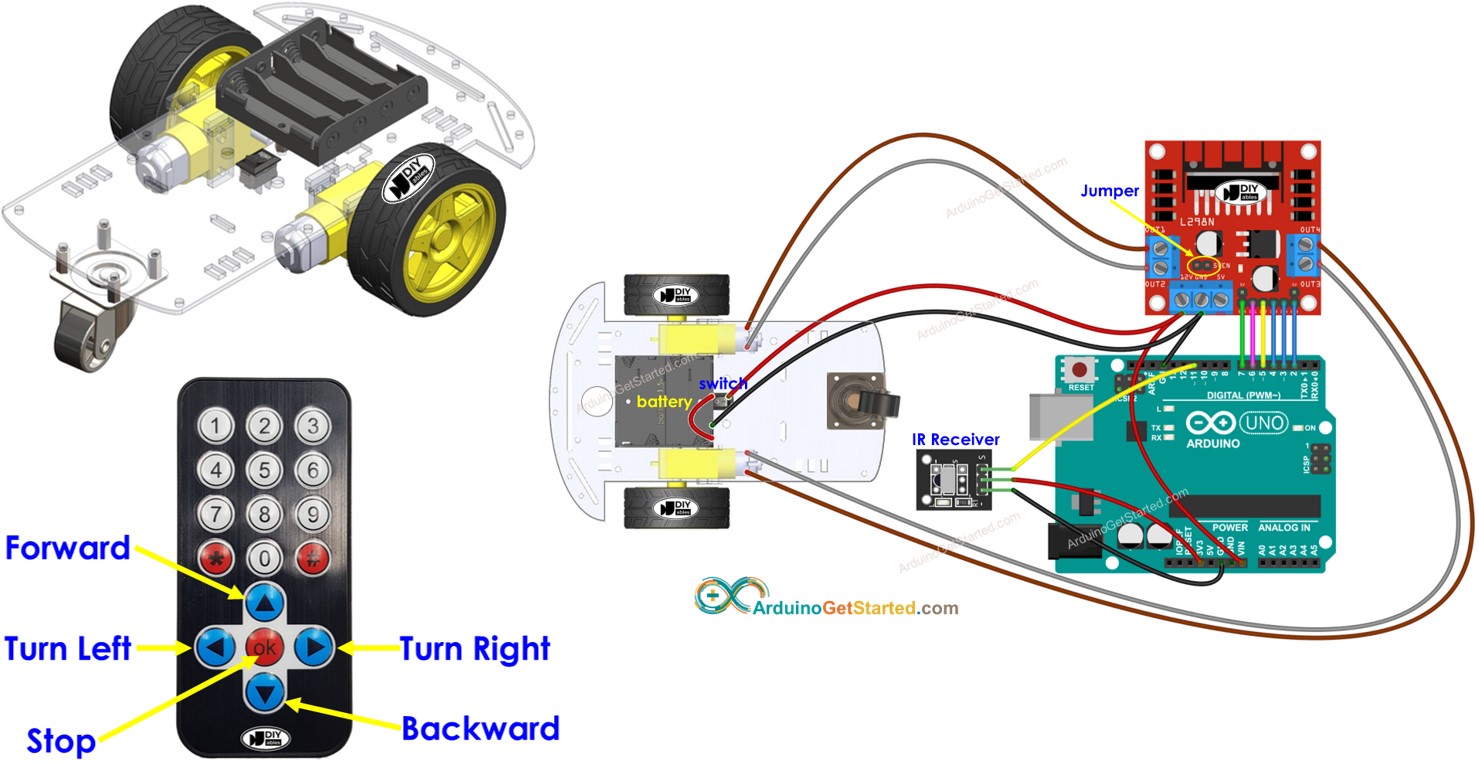
- Benutzer drücken die UP/DOWN/LEFT/RIGHT/OK-Tasten der IR-Fernbedienung.
- Arduino empfängt die UP/DOWN/LEFT/RIGHT/OK-Befehle über den IR-Empfänger.
- Arduino steuert das Auto so, dass es sich vorwärts/rückwärts/links/rechts/STOP bewegt, indem es den DC-Motor über den Motortreiber ansteuert.
Verdrahtungsdiagramm
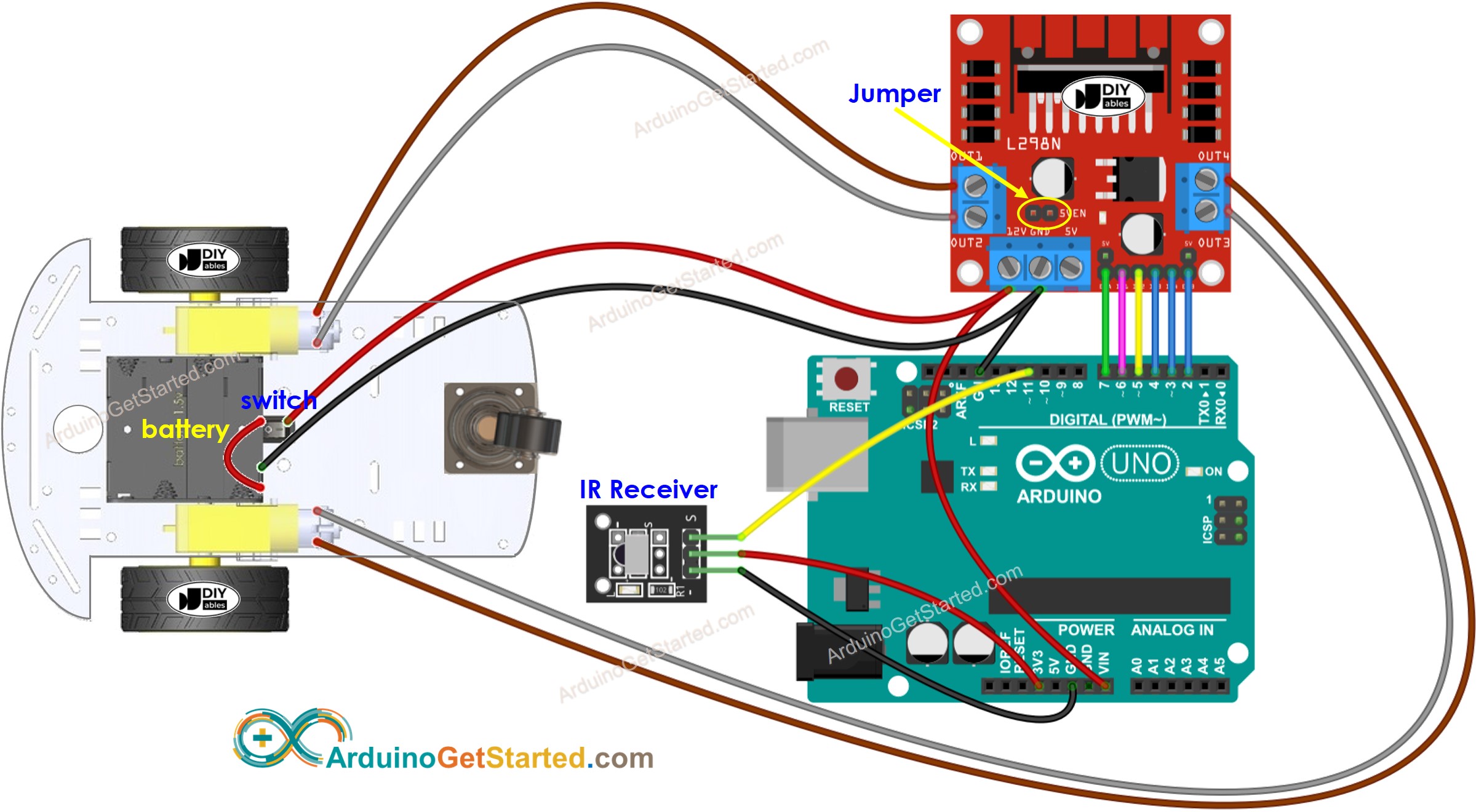
Dieses Bild wurde mit Fritzing erstellt. Klicken Sie, um das Bild zu vergrößern.
Normalerweise benötigen wir zwei Stromquellen:
- Eine Stromquelle für den Motor (indirekt über das L298N-Modul).
- Die andere Stromquelle für das Arduino-Board, das L298N-Modul und den IR-Empfänger.
Es gibt jedoch eine Möglichkeit, nur eine Stromquelle für alles zu verwenden. Man kann dafür vier 1,5-V-Batterien (insgesamt 6 V) verwenden. So können wir das machen:
- Schließen Sie die Batterien an das L298N-Modul an, indem Sie dem obigen Diagramm folgen.
- Entfernen Sie zwei kleine Jumper-Stecker, die die ENA- und ENB-Pins mit 5 Volt am L298N-Modul verbinden.
- Setzen Sie einen speziellen Verbinder (Jumper) mit der Bezeichnung 5VEN ein, der im obigen Diagramm mit einem gelben Kreis markiert ist.
- Verbinden Sie den 12-V-Pin des Schraubterminals des L298N-Moduls mit dem Vin-Pin des Arduino-Boards. Dadurch wird der Arduino direkt von der Batterie gespeist (insgesamt 6 V).
Bitte beachten Sie, dass während der Entwicklungsphase, wenn Sie das USB-Kabel zum Programmieren an den Arduino anschließen müssen, Sie die Stromversorgung zwischen der Batterie und dem Arduino-Board unbedingt trennen müssen, indem Sie ein Kabel vom Vin-Pin entfernen. Das Arduino-Board sollte nicht gleichzeitig von zwei Stromquellen versorgt werden.
Arduino-Code
Schnelle Schritte
- Installieren Sie die DIYables_IRcontroller-Bibliothek in der Arduino IDE, indem Sie dieser Anleitung folgen.
- Schließen Sie die Verkabelung gemäß dem oben gezeigten Diagramm.
- Trennen Sie das Kabel vom Vin-Pin am Arduino, denn wir werden den Arduino beim Hochladen des Codes über das USB-Kabel mit Strom versorgen.
- Drehen Sie das Auto um, sodass die Räder oben sind.
- Verbinden Sie den Arduino mit Ihrem Computer über das USB-Kabel.
- Kopieren Sie den bereitgestellten Code und öffnen Sie ihn in der Arduino IDE.
- Klicken Sie im Arduino IDE auf die Schaltfläche Hochladen, um den Code auf den Arduino zu übertragen.
- Verwenden Sie die IR-Fernbedienung, um das Auto vorwärts, rückwärts, nach links, nach rechts zu bewegen oder anzuhalten.
- Prüfen Sie, ob sich die Räder gemäß Ihren Befehlen richtig bewegen.
- Wenn sich die Räder in die falsche Richtung bewegen, tauschen Sie die Kabel des DC-Motors am L298N-Modul aus.
- Sie können die Ergebnisse auch im Serial Monitor der Arduino IDE sehen.
- Wenn alles einwandfrei funktioniert, trennen Sie das USB-Kabel vom Arduino und das Kabel wieder an den Vin-Pin anschließen, um den Arduino mit Strom aus der Batterie zu versorgen.
- Drehen Sie das Auto wieder in seine normale Position, wobei die Räder den Boden berühren.
- Viel Spaß beim Steuern des Autos!
Code-Erklärung
Sie finden die Erklärung in der Kommentarzeile des oben genannten Arduino-Codes.
Sie können mehr über den Code erfahren, indem Sie sich die folgenden Tutorials ansehen:
- Arduino - Infrared Remote Control tutorial
- Arduino - DC motor tutorial
Sie können dieses Projekt erweitern, indem Sie:
- Hindernisvermeidungssensoren hinzufügen, um das Auto sofort zu stoppen, wenn ein Hindernis erkannt wird.
- Eine Funktion hinzufügen, um die Geschwindigkeit des Autos zu steuern (siehe Arduino - DC motor Tutorial). Der bereitgestellte Code steuert das Auto mit voller Geschwindigkeit.
Video Tutorial
Wir erwägen die Erstellung von Video-Tutorials. Wenn Sie Video-Tutorials für wichtig halten, abonnieren Sie bitte unseren YouTube-Kanal , um uns zu motivieren, die Videos zu erstellen.